Clear Sky Science · nl
De verbeterde EME-YOLOv11 voor realtime detectie van polarizerfouten
Waarom kleine foutjes in schermen echt tellen
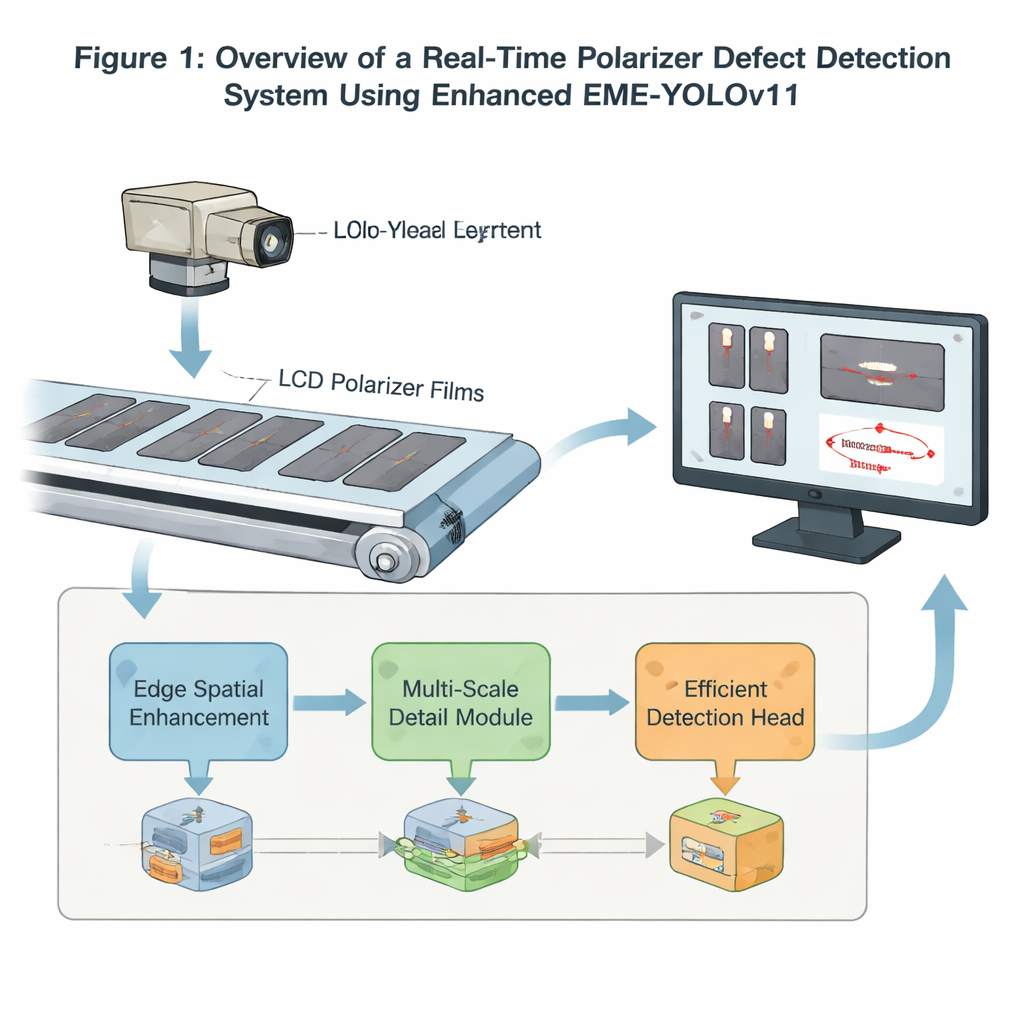
Elk smartphone-, laptop- en tv-scherm vertrouwt op een dunne optische laag, de polarizer, om te regelen hoe licht door het scherm gaat. Als die laag zelfs kleine vlekjes, vuildelen of krassen heeft, kan de beeldkwaliteit verslechteren en kunnen hele panelen worden afgekeurd. Tegenwoordig leunen de meeste fabrieken nog zwaar op menselijke inspecteurs of oudere beeldverwerkingstechnieken om deze fouten te vinden, wat traag, vermoeiend en niet altijd betrouwbaar is. Deze studie introduceert een slimmer, sneller AI-systeem — EME‑YOLOv11 — dat is ontworpen om deze defecten in realtime te detecteren terwijl panelen over de productielijn lopen.
Van mensenogen naar machinale ogen
In de lcd-industrie is de polarizer een cruciale component die sterk van invloed is op helderheid, contrast en kijkhoek. Veelvoorkomende defecten — zoals bellen, vlekken, vreemde deeltjes of gereedschapssporen — kunnen slechts een fractie van een millimeter groot zijn, maar toch een scherm degraderen of onbruikbaar maken. Traditionele inspecties waren gebaseerd op visuele controle door arbeiders, maar mensen hebben moeite om lange tijd zwakke of zeer kleine foutjes te herkennen, en hun oordeel varieert met ervaring en vermoeidheid. Vroege machine-vision systemen verbeterden dit door camera’s en handgemaakte regels te gebruiken om vormen, texturen of grijstinten te meten. Deze regelgebaseerde methoden falen echter wanneer defectvormen variëren, het contrast laag is of de achtergrond complex is — omstandigheden die vaak voorkomen bij polarizerfolies.
Neurale netwerken laten leren wat belangrijk is
Diep leren, en met name convolutionele neurale netwerken, heeft veranderd hoe computers beelden begrijpen doordat ze nuttige kenmerken direct uit data leren in plaats van te steunen op handmatig ontworpen regels. Binnen dit vakgebied is de YOLO (“You Only Look Once”) familie van modellen een werkpaard geworden voor realtime objectdetectie, met een balans tussen snelheid en nauwkeurigheid in één end‑to‑end raamwerk. De auteurs bouwen voort op het recente YOLOv11‑model, dat al is afgestemd op snelle detectie, en passen het specifiek aan voor polarizerinspectie. Hun doel is de gevoeligheid voor subtiele defecten te verhogen, het model licht genoeg te houden voor industriële inzet, en toch snel genoeg beelden te verwerken om gelijke tred te houden met bewegende productielijnen.
Randen verscherpen en inzoomen op fijne details
De eerste belangrijke verbetering richt zich op hoe het netwerk randen en ruimtelijke patronen waarneemt. De auteurs vervangen een standaardblok in de backbone van YOLOv11 door een nieuw module die twee takken parallel uitvoert: één tak gebruikt een Sobel-operator — een efficiënte, klassieke randfilter — om scherpe intensiteitsveranderingen te benadrukken, en de andere tak gebruikt reguliere convoluties om bredere texturen en structuren te behouden. Door deze twee inzichten te combineren en door te voeren, wordt het systeem beter in het accentueren van vage grenslijnen van vlekken en sporen die anders in de achtergrond zouden kunnen verdwijnen. Een tweede module herschrijft hoe het netwerk naar details op verschillende schalen kijkt. In plaats van pooling, dat subtiele variaties kan uitvlakken, gebruiken de auteurs gedilateerde convoluties met meerdere zorgvuldig gekozen spreidingen. Dit stelt het model in staat zowel zeer kleine, lokale kenmerken als bredere context vast te leggen zonder het aantal parameters sterk te doen toenemen, waardoor het kleine, onregelmatige defecten en grotere defecten beter herkent.
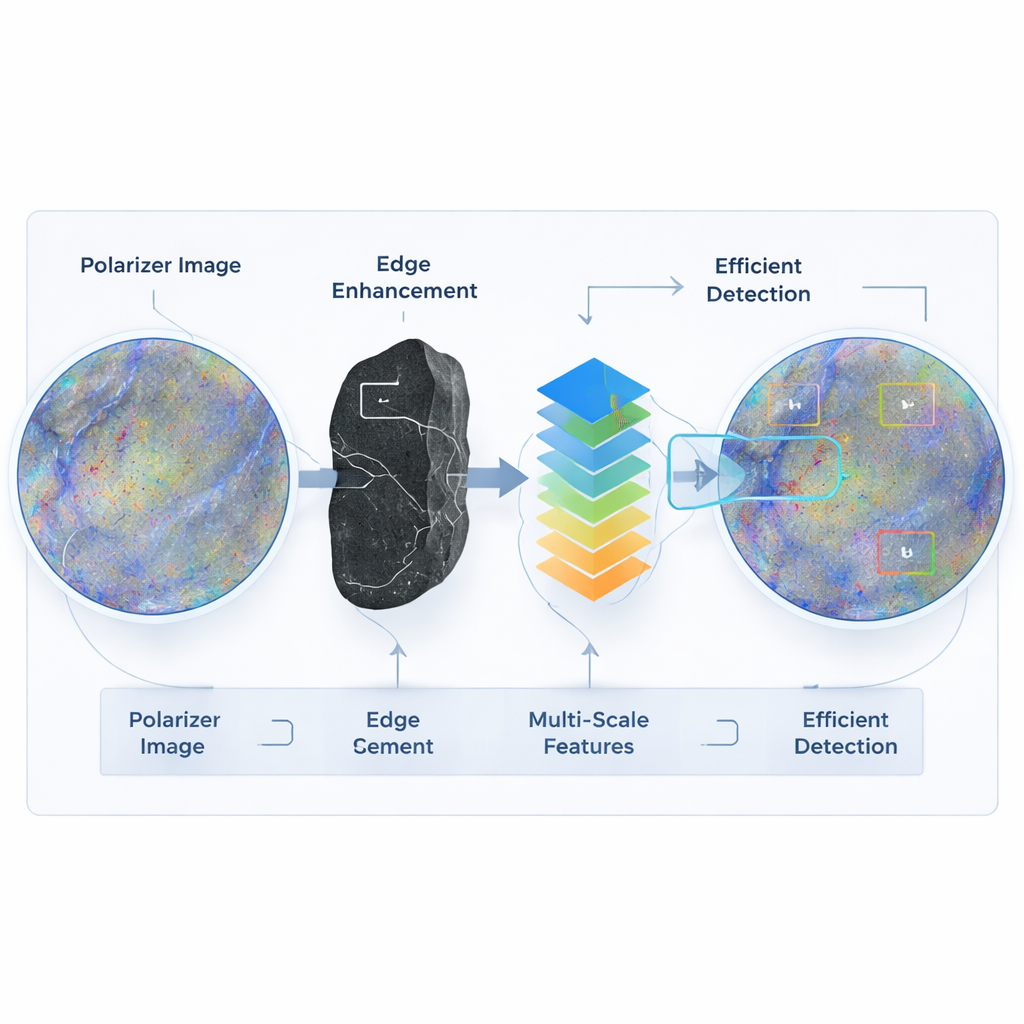
Snellere beslissingen met een slanker detectiekop
Aan de uitvoerzijde van het netwerk zet een herontworpen “head” featuremaps om in concrete voorspellingen over waar defecten zijn en welk type ze zijn. De auteurs herstructureren dit deel in drie resolutieniveaus — fijn voor kleine foutjes, middelgroot voor typische defecten en grof voor grotere — en vervangen standaardconvoluties door grouped convoluties, die berekeningen in kleinere, parallelle brokken opdelen. De head scheidt ook classificatie (wat voor soort defect) van box‑verbetering (exacte locatie). Deze combinatie vermindert het aantal berekeningen en de modelgrootte terwijl de nauwkeurigheid verbetert. In tests op een echte dataset van bijna 4.000 polarizerbeelden overtrof de verbeterde EME‑YOLOv11 niet alleen het originele YOLOv11 maar ook andere populaire one‑stage en transformer‑gebaseerde detectors, met hogere precisie en recall bij minder floating‑point‑operaties en minder parameters.
Wat dit betekent voor alledaagse schermen
Kort gezegd is EME‑YOLOv11 een slimmer en efficiënter paar “machinale ogen” voor polarizerinspectie. Door randen te verscherpen, fijne details te behouden en de beslissingslagen te stroomlijnen, detecteert het meer echte defecten terwijl het snel genoeg blijft voor reëel fabrieksgebruik. Hoewel de huidige tests zijn uitgevoerd op een high‑end grafische kaart, wijst het compacte ontwerp op toekomstige inzetbaarheid op ingebedde apparaten die direct op productielijnen worden geïnstalleerd. Als zulke systemen breed worden ingevoerd, kunnen fabrikanten minder panelen verspillen, de kwaliteit stabiliseren en kosten verlagen — wat uiteindelijk de betrouwbaarheid en het uiterlijk van de schermen die mensen dagelijks gebruiken verbetert.
Bronvermelding: Liu, R., Jing, C., Zhang, T. et al. The enhanced EME-YOLOv11 for real-time polarizer defect detection. Sci Rep 16, 7414 (2026). https://doi.org/10.1038/s41598-026-37884-2
Trefwoorden: polarizerfouten, industriële inspectie, diep leren, YOLO objectdetectie, machinaal zicht