Clear Sky Science · nl
Realtime industriële veiligheidsautomatisering met YOLO-architecturen die gebruikmaken van diverse chromatische domeinen
Slimmere ogen op de fabrieksvloer
Verborgen gebreken in metalen lasnaden kunnen stevige machines, bruggen of pijpleidingen veranderen in sluimerende gevaren. Traditioneel inspecteren getrainde keurders gloeiende lasnaden om kleine scheurtjes of openingen te vinden voordat ze tot ongelukken leiden. Dit artikel onderzoekt hoe kunstmatige intelligentie veel van dat waakzame werk kan overnemen door snelle beeldherkenningssoftware te gebruiken om lassen in realtime te controleren, zelfs terwijl onderdelen op een transportband voorbij rollen. Door meerdere versies van een populaire AI-detector genaamd YOLO te vergelijken en te testen hoe verschillende manieren om kleur weer te geven het zicht beïnvloeden, tonen de onderzoekers een route naar veiligere en efficiëntere fabrieken.
Waarom het opsporen van slechte lassen zo moeilijk is
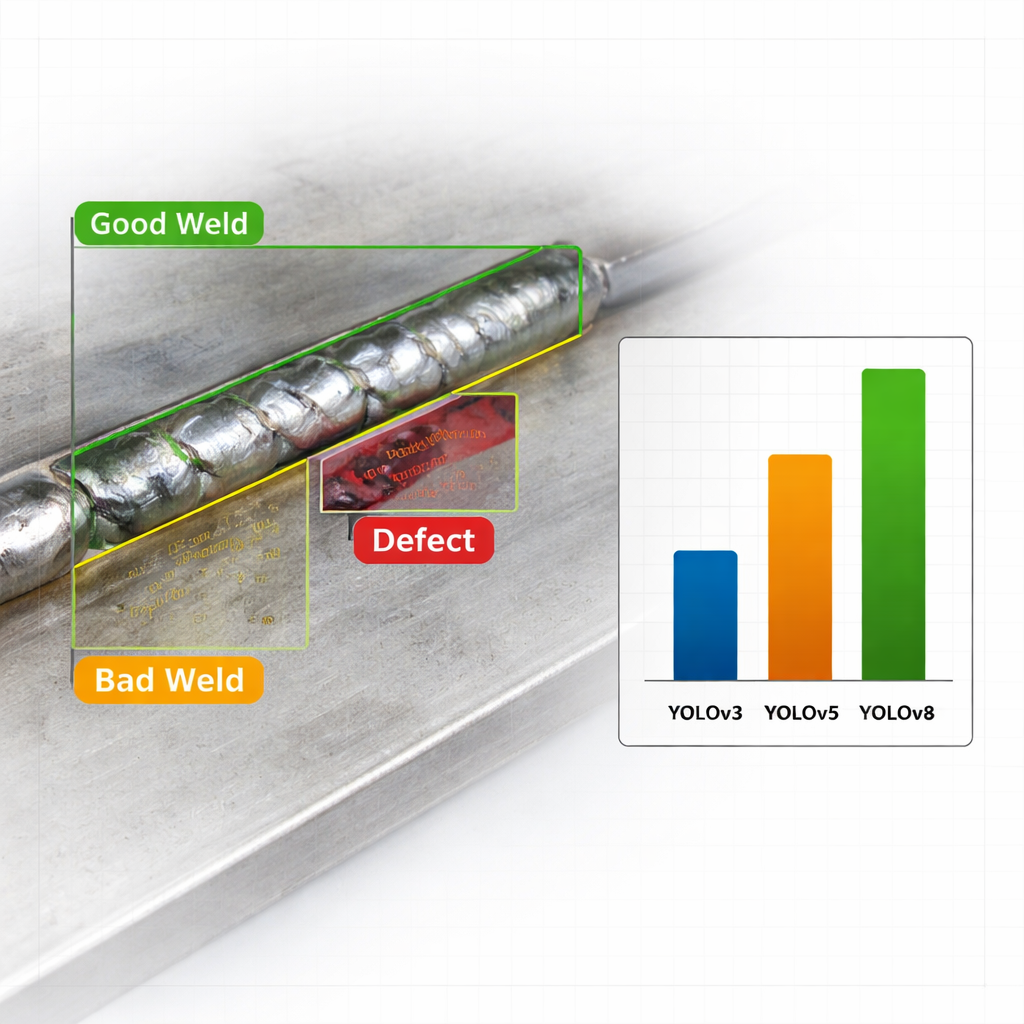
Op een drukke productielijn variëren lassen in vorm, glans en achtergrondruis. Eén afbeelding kan meerdere lassen en gebreken bevatten, waardoor eenvoudige beeldclassificatie ("goed" of "slecht" in het algemeen) veel te grof is. In plaats daarvan moet het systeem zowel specifieke probleemgebieden langs een naad vinden als labelen. De auteurs concentreren zich op drie praktische categorieën — goede las, slechte las en duidelijke fout — omdat elk een andere reactie vereist, van het accepteren van een onderdeel tot directe nabewerking. Ze gebruiken een openbaar beschikbare dataset van meer dan zesduizend geannoteerde lasafbeeldingen, zodat de AI wordt getraind en getest op een realistisch scala aan oppervlakken, lichtomstandigheden en fouttypes.
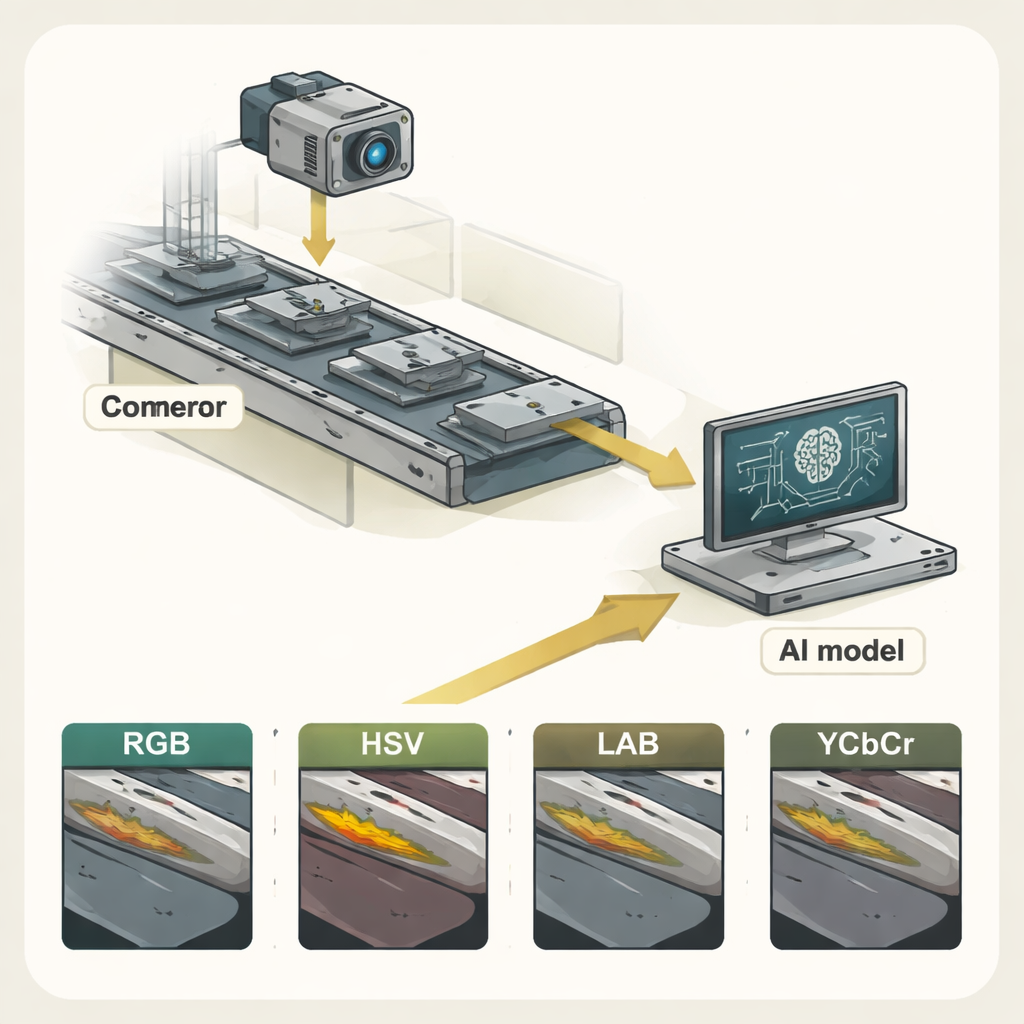
Machines leren één keer te kijken en te beslissen
De studie draait om de YOLO ("You Only Look Once")-familie van objectdetectiemodellen, bekend omdat ze een afbeelding in één doorgang scannen en kaders om gedetecteerde objecten trekken. De onderzoekers vergelijken drie generaties: YOLOv3, YOLOv5 en de nieuwste YOLOv8. Elke versie verbetert snelheid en nauwkeurigheid door diepere netwerken en slimmere trainingsstrategieën. Om de lichtuitdagingen van echte fabrieken beter te simuleren, transformeert het team elke lasafbeelding bovendien naar vier verschillende kleurenruimten — RGB (het vertrouwde rood–groen–blauw), HSV, LAB en YCbCr — en traint aparte modellen op elk daarvan. Deze multispectrale benadering stelt hen in staat een gerichte vraag te stellen: helpt het veranderen van de kleurencodering de AI om gebreken duidelijker te zien?
Kleur, snelheid en nauwkeurigheid in de praktijk
Over alle experimenten heen is één patroon duidelijk: het nieuwste model, YOLOv8, presteert beter dan zijn voorgangers. Wanneer het wordt getraind op standaard RGB-beelden behaalt YOLOv8 een genormaliseerde mean average precision (mAP@0.5) van 0,592, duidelijk hoger dan YOLOv3 en YOLOv5 onder dezelfde omstandigheden. In praktische termen betekent dit dat het beter is in zowel het vinden als correct labelen van lasgebieden. Het model is ook extreem snel en verwerkt ruwweg 138 beelden per seconde op een moderne grafische kaart — ver boven de 30 frames per seconde die vaak als realtime referentie wordt gehanteerd. Onder de kleurenruimten levert RGB consequent de sterkste resultaten voor alle drie YOLO-versies, terwijl HSV, LAB en YCbCr achterblijven. Die alternatieve coderingen kunnen bepaalde visuele kenmerken accentueren, maar in deze context wegen ze niet op tegen de eenvoud en informatiedichtheid van RGB.
Van laboratoriumtests naar de factory edge
Om real-world haalbaarheid aan te tonen, zetten de auteurs een gestroomlijnd YOLOv8-model in op een Raspberry Pi-gebaseerd edge-apparaat dat is aangesloten op een transportband en camera. Terwijl gelaste onderdelen onder de lens bewegen, legt het systeem frames vast, maakt ze schoon met basisvoorbewerking en voert detectie lokaal uit, waarbij elke las wordt geclassificeerd als goed, slecht of defect. Resultaten worden in een database vastgelegd en op een dashboard weergegeven voor inspecteurs, die live foutmarkeringen en langetermijnkwaliteitsontwikkelingen kunnen zien. Daarnaast kan het raamwerk aanbevelingen genereren, bijvoorbeeld door aanpassingen van las-snelheid of spanning voor te stellen, of te waarschuwen wanneer onderhoud aan apparatuur nodig kan zijn op basis van terugkerende defecten.
Wat dit betekent voor veiliger produceren
Voor een leek is de belangrijkste uitkomst helder: dit werk toont aan dat een lichtgewicht, modern AI-model betrouwbaar en zeer snel risicovolle lassen onder echte industriële omstandigheden kan signaleren, vooral wanneer het gewone RGB-camerabeelden gebruikt. YOLOv8 blijkt nauwkeurig genoeg om duidelijk slechte lassen te onderscheiden en snel genoeg om gelijke tred te houden met hogesnelheidsproductielijnen, en dit alles terwijl het op bescheiden hardware dicht bij de machines draait. De auteurs betogen dat dit soort geautomatiseerde, kleurbewuste inspectie menselijke fouten kan verminderen, problemen eerder kan opsporen en veiligere, consistentere productie kan ondersteunen. Toekomstige verfijningen — zoals rijkere trainingsdata en betere omgang met subtielere defecttypes — zouden van deze digitale inspecteurs een vast onderdeel van industriële veiligheid kunnen maken.
Bronvermelding: Pati, N., Sharma, A., Gourisaria, M.K. et al. A real-time industrial safety automation using YOLO architectures leveraging diverse chromatic domains. Sci Rep 16, 7253 (2026). https://doi.org/10.1038/s41598-026-37869-1
Trefwoorden: detectie van lasfouten, industriële veiligheidsautomatisering, YOLOv8, realtime computer vision, edge AI