Clear Sky Science · nl
Autonome padplanning voor intercostale robot-echobeeldvorming met behulp van reinforcement learning
Robots die artsen helpen door de ribben heen te zien
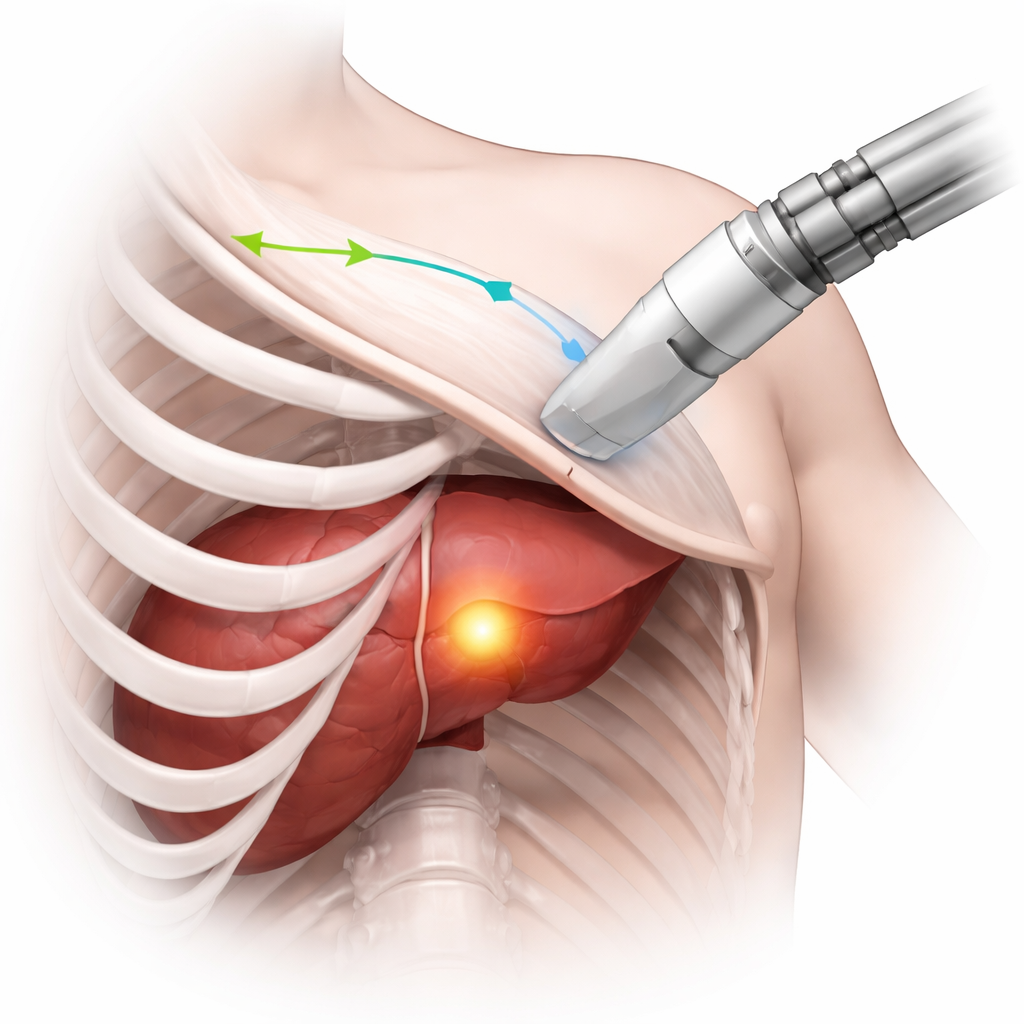
Wanneer artsen echo gebruiken om organen zoals de lever of het hart te volgen, staan de ribben vaak in de weg en werpen ze donkere schaduwen die cruciale details verbergen. Een helder beeld hangt sterk af van de vaardigheid en ervaring van degene die de probe vasthoudt. Deze studie onderzoekt hoe een robot, aangestuurd door kunstmatige intelligentie, automatisch een echo-scanpad tussen de ribben kan plannen zodat tumoren en andere doelen duidelijk en consistent zichtbaar zijn, ongeacht wie de machine bedient.
Waarom tussen de ribben zien zo moeilijk is
Echo is populair omdat het veilig, betaalbaar en real-time beelden oplevert. Maar om organen achter de ribbenkast in beeld te brengen, moet de probe voorzichtig door de smalle openingen tussen de ribben worden geleid. Als de geluidsgolven bot raken, worden ze geblokkeerd en ontstaan er grote zwarte gebieden in het beeld waar niets te zien is. Menselijke bedieners leren door training en ervaring hoe ze de probe moeten kantelen en verplaatsen om deze schaduwen te vermijden en tegelijkertijd het interessegebied in beeld te houden. Dit is vooral belangrijk bij procedures zoals ablatie van levertumoren, waar chirurgen herhaaldelijk moeten controleren of de hele tumor is behandeld. De uitdaging is om deze delicate, driedimensionale vaardigheid om te zetten in iets dat een robot zelfstandig kan doen.
Een robot leren met virtuele patiënten
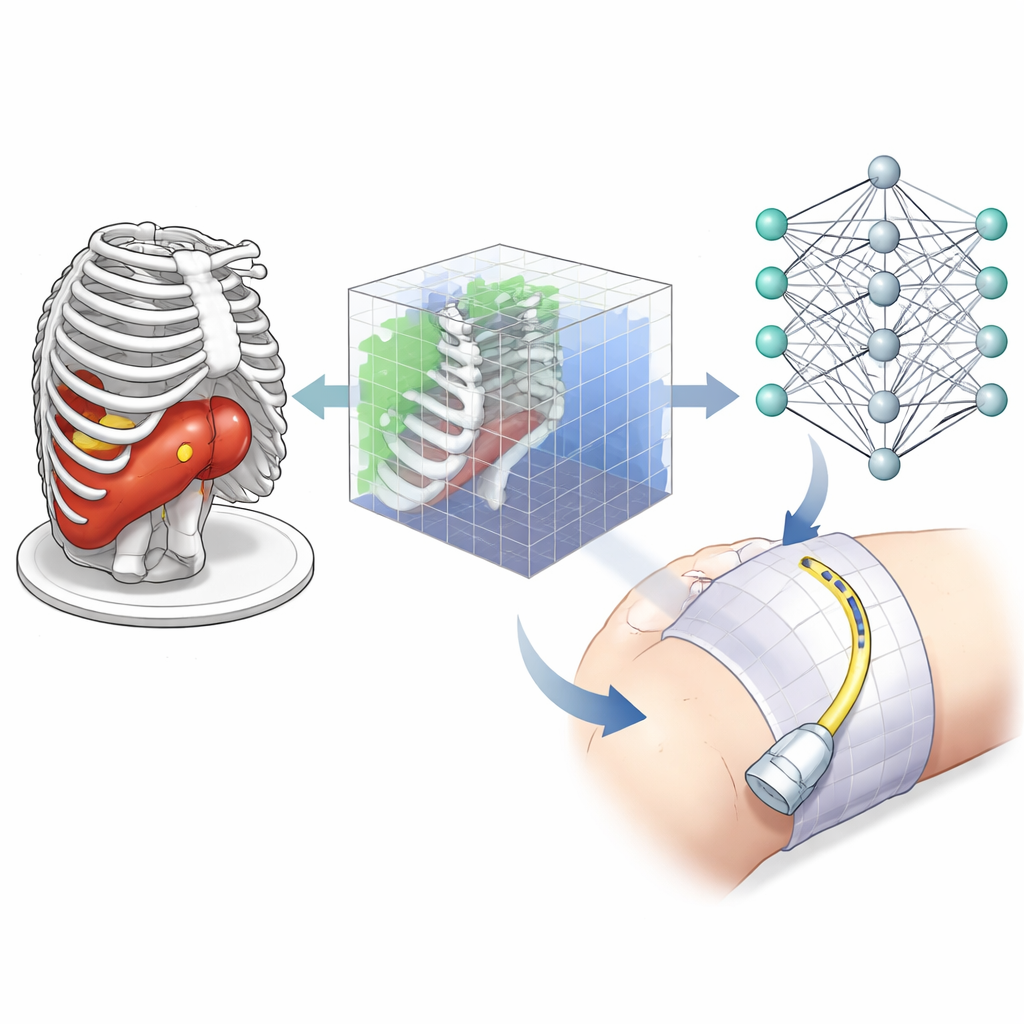
In plaats van direct te leren van rumoerige en variabele echobeelden, bouwden de onderzoekers een virtuele trainingsomgeving met behulp van CT-scans. CT biedt een scherp driedimensionaal kaartbeeld van botten, huid en lever, en tumoren kunnen met verschillende vormen en posities worden toegevoegd om veel realistische scenario’s te creëren. In deze simulator beweegt een virtuele echoprobe over het huidoppervlak boven de ribben, en worden de paden van de echobundels gemodelleerd als stralen die door zacht weefsel gaan maar door bot worden geblokkeerd. Dit eenvoudige maar realistische model vertelt het systeem welke delen van een tumor zichtbaar zijn, hoeveel het signaal verzwakt tijdens het reizen, en waar schaduwen ontstaan.
Hoe het leersysteem beslist waar te scannen
Het team gebruikte een vorm van kunstmatige intelligentie die reinforcement learning heet, waarbij een "agent" door proefondervindelijk leren acties kiest die tot hogere beloningen leiden. Bij elke stap ziet de agent een compacte 3D-weergave van de situatie rond de tumor: welke kleine volumeelementen tumor bevatten, welke bot bevatten en welke worden gekruist door de gesimuleerde echostralen. Hij kan de virtuele probe in kleine stappen verplaatsen of kantelen, of schakelen tussen een "verkennings"-modus en een "opname"-modus die wordt gebruikt om de uiteindelijke 3D-weergave op te bouwen. De beloning combineert drie doelen: zoveel mogelijk van het doelvolume afdekken, de probe dicht genoeg houden om signaalverlies te verminderen, en gebieden vermijden waar stralen door bot worden geblokkeerd en dus nutteloze schaduwbeelden zouden ontstaan.
De methode op de proef stellen
Om te controleren of de geleerde strategie generaliseert buiten de trainingsvoorbeelden, testten de onderzoekers deze op nieuwe CT-scans en nieuwe tumoren die de agent nog nooit had gezien. In deze proeven werd een scanplan als succesvol beschouwd als ten minste 95% van het doelvolume binnen een beperkt aantal stappen werd afgebeeld. Voor kleine, middelgrote en grote doelen behaalde het systeem succespercentages tot 95%, terwijl het een hoog aandeel schaduwvrije beelden en redelijke afstanden tussen probe en tumor handhaafde. De methode werkte ook wanneer er meerdere doelen te bestrijken waren, zoals resterende tumorplekjes verspreid in de lever, alhoewel de prestaties natuurlijk iets terugliepen naarmate de taak complexer werd.
Van simulatie naar de operatiekamer
Vooralsnog richt het werk zich op het plannen van het pad in plaats van op het fysiek bewegen van een echte robot. De paden worden gegenereerd op patiëntspecifieke CT-scans of op generieke CT-"atlassen" die later met bestaande registratietechnieken op iemands anatomie kunnen worden afgestemd. In de toekomst is het de bedoeling deze planningsmodule te combineren met robotbesturing, bewegingscompensatie voor ademhaling en realistischere simulatie van echoafbeeldingen. Voor leken is de belangrijkste conclusie dat deze aanpak echo-monitoring tijdens procedures zoals behandeling van levertumoren betrouwbaarder en minder afhankelijk van de expertise van de bediener kan maken, door een robot slimme, schaduwvrije routes tussen de ribben te laten vinden zodat het hele doel in beeld blijft.
Bronvermelding: Bi, Y., Qian, C., Zhang, Z. et al. Autonomous path planning for intercostal robotic ultrasound imaging using reinforcement learning. Sci Rep 16, 6356 (2026). https://doi.org/10.1038/s41598-026-37702-9
Trefwoorden: robotische echo, reinforcement learning, levertumorbeeldvorming, intercostale scanning, medische robotica