Clear Sky Science · nl
Dynamische kwaliteitsbewuste padplanning voor 6-DoF-robotarmen met BiRRT en metaheuristieke optimalisatie op basis van B-splinepaden
Robots die soepel en veilig bewegen
Industriële robots delen tegenwoordig drukke werkruimtes met mensen, gereedschap en transportsystemen. In deze krappe omgeving kan een robotarm niet eenvoudig van punt A naar punt B reiken; hij moet dat doen zonder botsingen, met een laag energieverbruik en zonder zichzelf — of nabijstaande apparatuur — te laten schudden. Dit artikel beschrijft een praktische manier om zulke voorzichtige bewegingen te plannen voor een gangbare zesschakelige industriële arm, waarbij ruwe, door de computer gevonden paden worden omgezet in vloeiende, energiebewuste bewegingen die veilig op echte fabrieksapparatuur kunnen worden uitgevoerd.
Waarom het plannen van een eenvoudige reikwijdte verrassend moeilijk is
Als een robotarm beweegt, moeten veel factoren tegelijk worden afgewogen. Het pad moet kort zijn zodat taken snel klaar zijn, het energieverbruik moet beperkt blijven om warmte en slijtage te verminderen, en de beweging moet zacht genoeg zijn om schokken of trillingen te vermijden. Klassieke benaderingen tekenen soepele wiskundige krommen (zoals splines) door een paar met de hand gekozen tussenpunten, wat goed werkt in open ruimte maar inefficiënt of zelfs onveilig kan worden in een rommelige cel. Nieuwere samplingmethoden, zoals Rapidly Exploring Random Trees (RRT), zijn goed in het doorkruisen van complexe obstakelvelden maar leveren vaak paden met scherpe bochten die zwaar zijn voor motoren en tandwielen. De auteurs betogen dat geen van beide methoden op zichzelf voldoende is; in plaats daarvan combineren ze ze in een tweefasenkader.
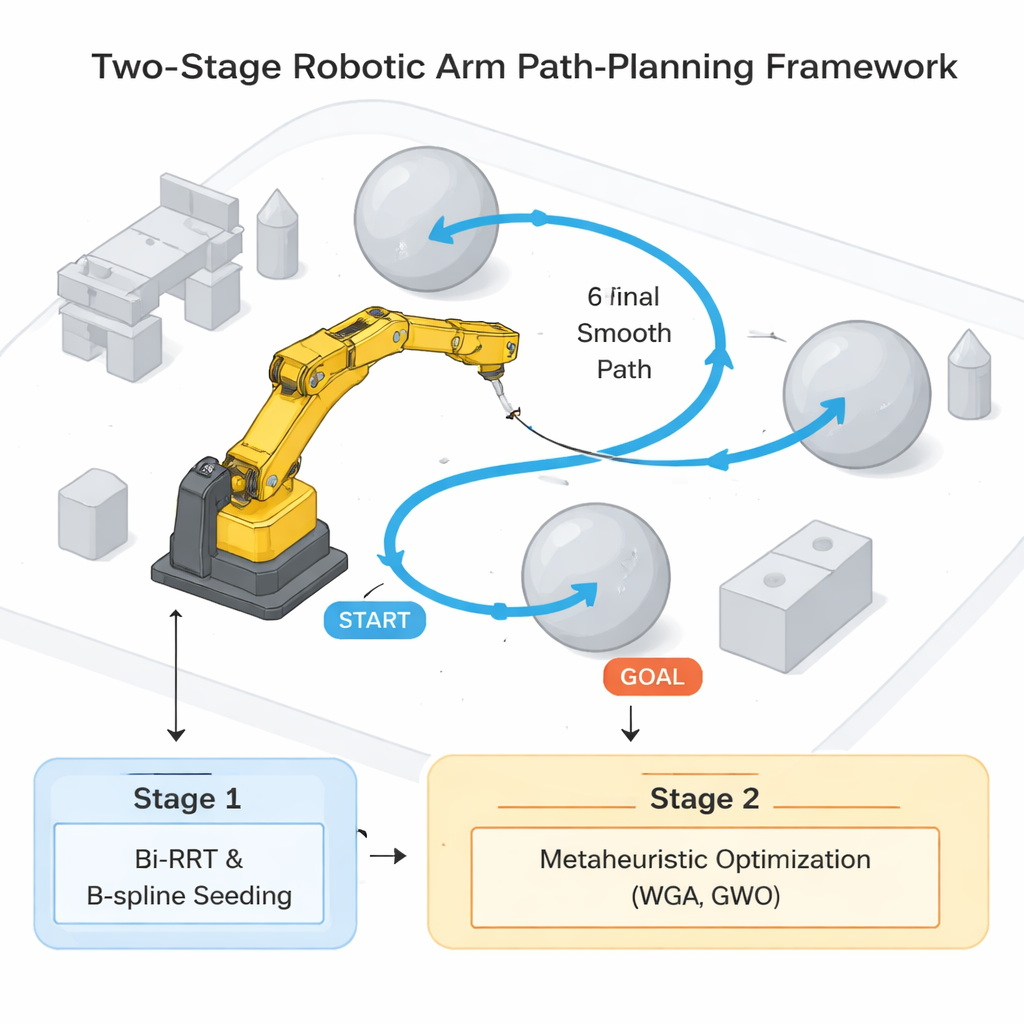
Een tweefasig stappenplan voor robotbeweging
In de eerste fase bouwt het team een veilige “referentieroute” in de gewrichtenruimte van de robot in plaats van alleen de positie van de hand in de ruimte. Ze beginnen met een vloeiende B-splinekromme die de start- en doelposities verbindt en bolvormige obstakels met een veiligheidsmarge ontwijkt. Deze kromme stuurt vervolgens een bidirectionele RRT (Bi-RRT)-planner die twee willekeurige bomen laat groeien — vanaf de start en vanaf het doel — totdat ze elkaar ontmoeten in een botsingsvrij pad. Gedurende dit proces wordt elke voorlopige beweging van de hele arm gecontroleerd tegen vereenvoudigde obstakelvormen. Zodra een pad is gevonden, worden overbodige bochten ingekort door zogenaamde “short-cutting” en wordt het resultaat opnieuw weergegeven als een in de tijd geparametriseerde spline die de robot in principe zou kunnen volgen.
De robot leren zachter te bewegen
De tweede fase neemt dit haalbare maar onvolmaakte pad en verfijnt het op kwaliteit. Hier gebruiken de auteurs twee door de natuur geïnspireerde optimalisatiemethoden: een hybride Whale–Genetic Algorithm (WGA) en de Grey Wolf Optimizer (GWO). Beide werken op een beperkte set controlepunten en timingknoppen langs de oorspronkelijke spline, maar ze mogen deze punten alleen binnen vooraf berekende veilige corridors rond het pad verplaatsen. Elke kandidaatbeweging krijgt een score gebaseerd op één gecombineerde maat die drie ingrediënten mengt: hoe ver de robothand reist, hoeveel energie op gewrichtsniveau wordt gebruikt (gebaseerd op de eigenschappen van elke motor), en hoe ‘schokkerig’ de gewrichten zijn — hoe snel hun versnellingswaarden in de tijd veranderen. Door herhaaldelijk kandidaatpaden voor te stellen, te testen en te verbeteren, zoeken deze optimalisatoren naar bewegingen die nog steeds botsingsvrij zijn maar veel vloeiender en beter uitvoerbaar zijn.
Wat de simulaties laten zien
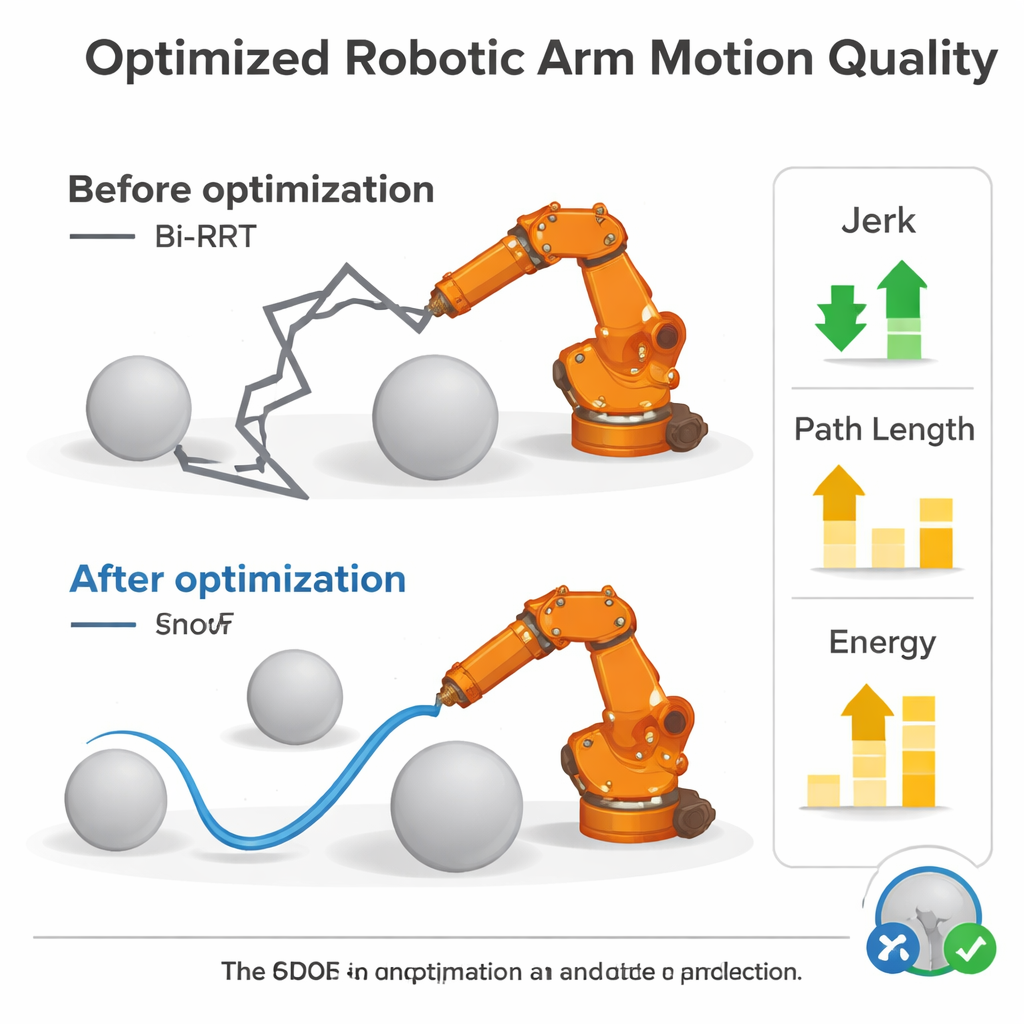
De auteurs testen hun pijplijn op een digitaal model van een veelgebruikte industriële arm, de KUKA KR 4 R600, die door een scène met drie obstakels beweegt over een vaste beweging van twee seconden. Een puur spline-gebaseerde oplossing is al redelijk soepel maar benut niet systematisch alle mogelijke veilige routes. Een Bi-RRT met short-cutting vindt een pad van vergelijkbare geometrische lengte en zelfs lager energieverbruik, maar met een groot nadeel: de jerk-index — een indicator van hoe abrupt de gewrichten hun versnelling veranderen — is ongeveer tien keer hoger, wat wijst op een beweging die waarschijnlijk trillingen en spanningen in een echte machine zou veroorzaken. Na toepassing van WGA of GWO wordt de jerk met ongeveer 94–96 procent verminderd ten opzichte van dit ruwe Bi-RRT-pad. Deze dramatische verzachting gaat gepaard met slechts bescheiden toename in reisafstand (ongeveer 15–17 procent) en energiegebruik (ongeveer een factor twee), een compromis dat de auteurs hanteren als goed besteed voor echte apparatuur.
Van theorie naar fabrieksvloer
Voor niet‑specialisten is de belangrijkste conclusie dat de auteurs een concreet recept — en MATLAB-gebaseerde hulpmiddelen — leveren om de eerste, ruwe beweging van een robot om te zetten in een gepolijste, hardwarevriendelijke beweging. Hun aanpak garandeert eerst dat een pad bestaat door een rommelige omgeving en herschikt dat pad vervolgens zodat de arm met minder rukken beweegt en toch alle gewrichtslimieten en speling respecteert. Het eindresultaat is een verzameling bewegingen die een echte industriële robot veiliger en betrouwbaarder kan uitvoeren, en die de basis legt voor toekomstige uitbreidingen waarbij robots werkruimtes met mensen delen en hun bewegingen in realtime aanpassen met camera’s en zelfs hersensignaalinterfaces.
Bronvermelding: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Trefwoorden: robotpadplanning, industriële robotarm, botsingsvermijding, bewegingsoepelheid, metaheuristieke optimalisatie