Clear Sky Science · nl
Diep leren voor detectie van bouwafval met ConvNeXt V2 EMA‑attention en WIoU v3‑verlies
Waarom slimmer sorteren van bouwpuin ertoe doet
Elke nieuwbouw, renovatie of sloop produceert bergen puin — gebroken beton, stenen, tegels, hout, schuim en meer. Veel van dit materiaal zou gerecycled kunnen worden, maar belandt vaak op stortplaatsen omdat handmatig sorteren traag, duur en foutgevoelig is. Deze studie onderzoekt hoe een geavanceerde vorm van kunstmatige intelligentie automatisch verschillende typen bouwafval op afbeeldingen kan herkennen en sorteren, waardoor steden vervuiling kunnen verminderen, grondstoffen kunnen besparen en dichter bij echt circulair gebruik van bouwmaterialen komen.
Puin, grondstoffen en een groeiend wereldwijd probleem
Bouw- en sloopafval is nu een van de snelst groeiende afvalstromen ter wereld, met ongeveer een miljard ton per jaar. Deze hopen puin nemen ruimte in, vormen een risico voor vervuiling van bodem en water en verspillen materialen waar al energie en emissies in zijn gestoken. Behandeling berust nog sterk op storten en opslaan. Geautomatiseerde visiesystemen die snel beton van steen, tegel van hout of schuim van gipsplaat kunnen onderscheiden, zouden de recyclingpercentages sterk kunnen verbeteren. In de praktijk zijn bouwplaatsen echter chaotisch: objecten overlappen, zijn bedekt met stof en hebben vergelijkbare kleuren en texturen, wat betrouwbare automatische herkenning moeilijk maakt.
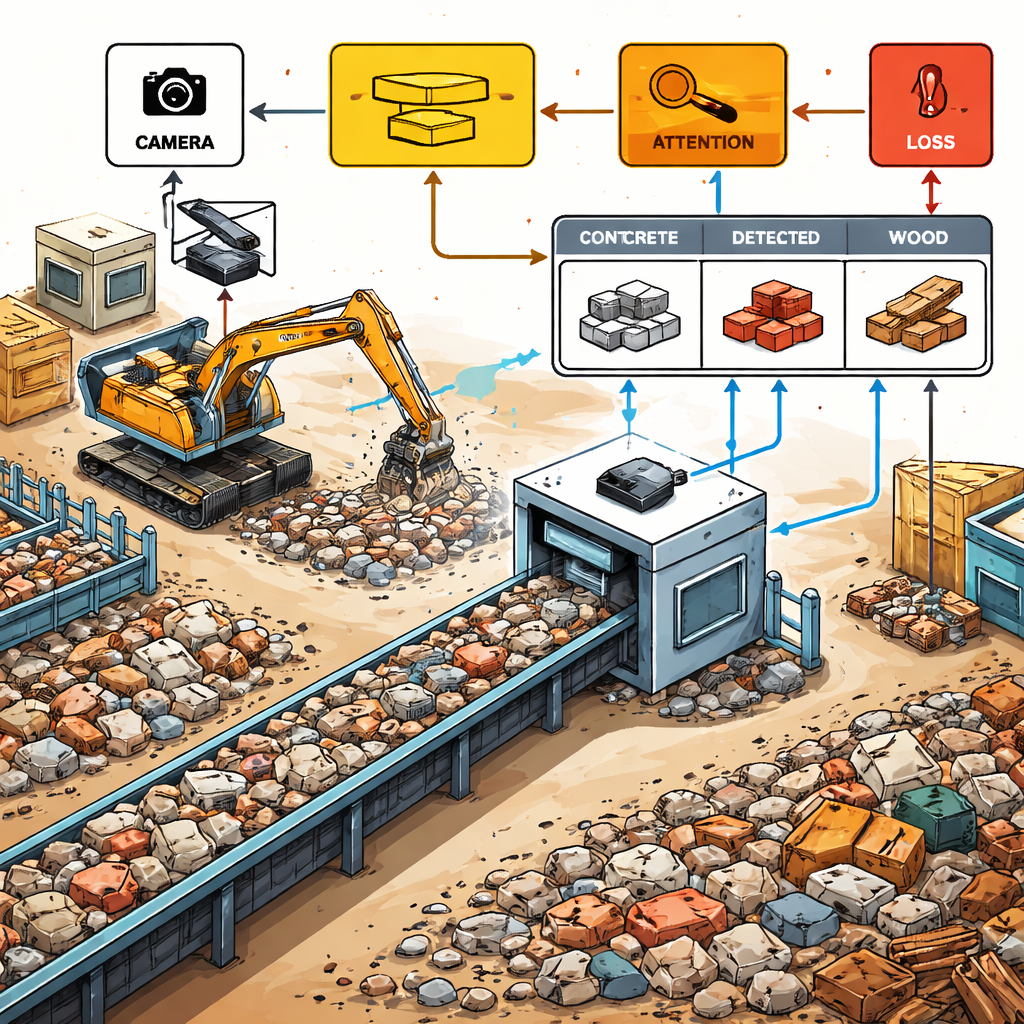
Een nieuw digitaal “oog” voor afval op de transportband
De auteurs presenteren een op maat gemaakt objectdetectiesysteem genaamd YOLO‑CEW, gebouwd op de populaire YOLO‑familie van realtime visiemodellen. Ze trainen het op een gespecialiseerd dataset van 1.774 afbeeldingen genomen in een recyclinginstallatie op Cyprus, met meer dan 11.000 gelabelde stukken bouw- en sloopafval verdeeld over zes veelvoorkomende categorieën: beton, baksteen, tegel, gipsplaat, hout en schuim. Afbeeldingen zijn opgesplitst in trainings-, validatie- en testsets om overfitting te voorkomen, en het model wordt meerdere keren met verschillende willekeurige starts uitgevoerd om robuuste resultaten te garanderen. Het doel is het systeem snel genoeg te houden voor gebruik op bewegende transportbanden, terwijl de nauwkeurigheid bij het vinden en labelen van elk stuk puin aanzienlijk verbetert.
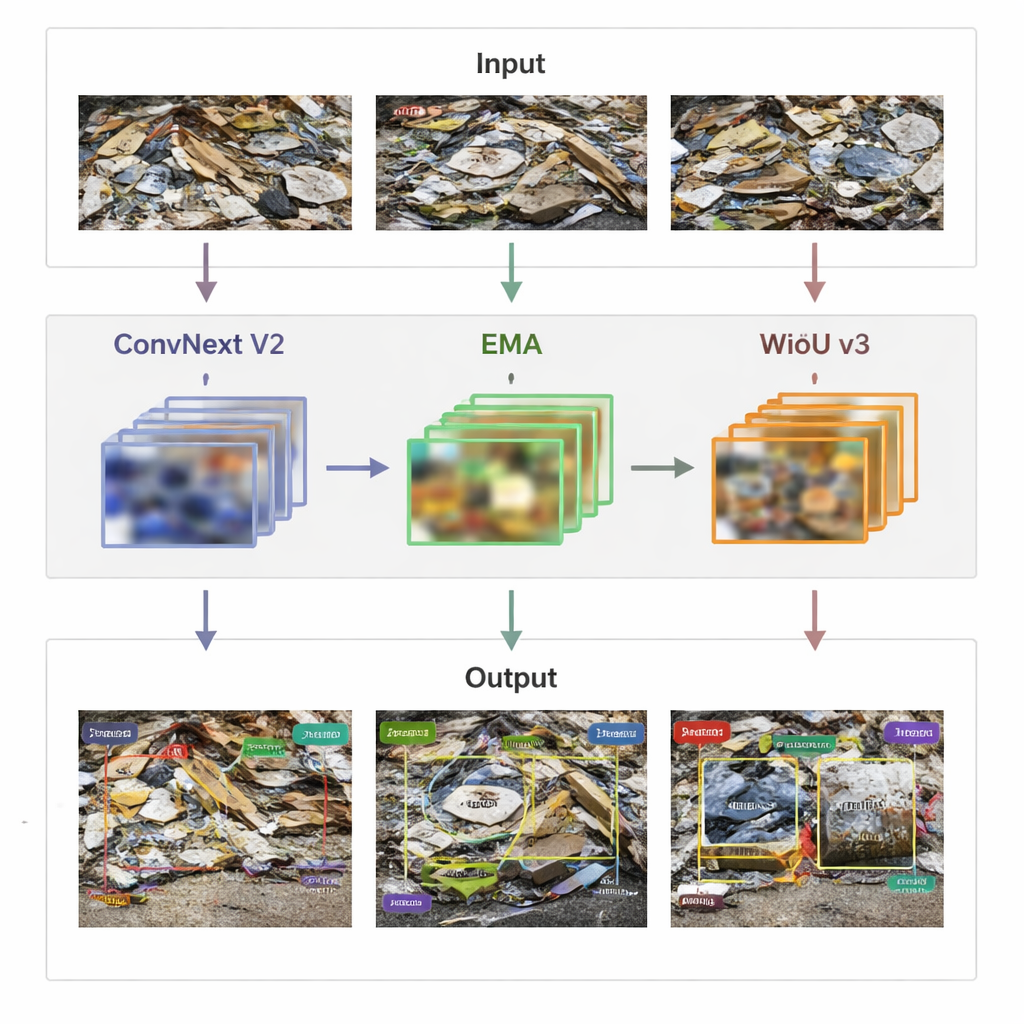
Hoe de verbeterde AI beter kijkt en leert van fouten
YOLO‑CEW verbetert het basismodel YOLOv8 op drie belangrijke manieren. Ten eerste vervangt het op geselecteerde lagen de feature‑extractor door een nieuwere backbone genaamd ConvNeXt V2, die subtiele visuele verschillen — zoals fijne patronen die tegels van beton onderscheiden — beter vastlegt zonder het systeem veel te vertragen. Ten tweede voegt het een Efficient Multi‑scale Attention (EMA)‑module toe die het netwerk leert zich te concentreren op de meest informatieve regio’s op verschillende schalen, waardoor het zowel grote platen als kleine, deels verborgen fragmenten beter vindt en afleidende achtergrondruis negeert. Ten derde introduceert het een bijgewerkte trainingsverliesfunctie, WIoU v3, die zeer slechte voorspellingen van begrenzingsboxen minder zwaar meeweegt en het leerproces concentreert op veelbelovende voorbeelden, waardoor het model zijn boxen strakker om echte objecten kan trekken en minder wordt misleid door ruisvolle monsters.
Het model testen onder realistische omstandigheden
Op de bouwafval‑dataset behaalt YOLO‑CEW een precisie van 96,84%, een recall van 95,95% en een algehele detectiescore (mAP@50) van 98,13%, allemaal hoger dan de originele YOLOv8‑baseline. In praktische termen betekent dit dat het minder objecten mist en minder valse alarmen geeft. Het model is bijzonder sterk in het onderscheiden van uitdagende klassen zoals tegels en schuim, hoewel er nog verwarring blijft tussen baksteen en beton wanneer stof grenzen vervaagt. Belangrijk is dat het systeem nog steeds ongeveer 128 frames per seconde draait — ruimschoots boven wat nodig is voor realtime monitoring — waardoor het geschikt is voor gebruik in actieve recyclinglijnen. Statistische toetsen met een bootstrap‑procedure bevestigen dat deze verbeteringen niet toevallig zijn. Vergelijkingen met meerdere andere YOLO‑varianten tonen dat YOLO‑CEW consequent leidend is in nauwkeurigheid, terwijl het een gunstige balans tussen snelheid en prestaties behoudt.
Voorbij één fabriek: aanpassen aan andere afvalstromen
Om te onderzoeken of hun aanpak generaliseert, testen de onderzoekers YOLO‑CEW ook op een aparte openbare dataset voor afvaldetectie die veelvoorkomende huishoudelijke materialen zoals plastic, glas en karton omvat. Zelfs zonder specifiek voor deze nieuwe toepassing te zijn ontworpen, presteert het model nog beter dan de standaard YOLOv8 in precisie, recall en algehele detectiekwaliteit. Dit suggereert dat de architectuurverbeteringen — betere feature‑extractie, slimmere aandacht en zorgvuldiger omgaan met slechte trainingsvoorbeelden — herbruikbaar zijn voor andere recycling- en milieu‑monitoringstaken, van huishoudelijk afvalsorteren tot zwerfafvaldetectie door drones.
Wat dit betekent voor schonere, slimmere steden
Voor niet‑specialisten is de hoofdconclusie dat YOLO‑CEW fungeert als een veel nauwkeuriger en scherper kijkend camerasysteem voor bouwpuin. Het kan een bewegende stroom puin volgen, elk object eruit pikken en met hoge betrouwbaarheid en snelheid het materiaal labelen. Dit maakt het eenvoudiger om geautomatiseerde lijnen te ontwerpen waar machines materialen voor hergebruik scheiden en routen in plaats van te storten. Hoewel uitdagingen blijven — zoals omgaan met extreme rommel, stof en zelden geziene materialen — laat de studie zien dat zorgvuldig afgestemde deep‑learningmodellen de huidige hopen “afval” kunnen omzetten in toekomstige grondstofstromen, en daarmee groenere bouwpraktijken en slimmere steden ondersteunen.
Bronvermelding: Han, D., Ma, M., Li, X. et al. Deep learning for construction waste detection using ConvNeXt V2 EMA attention and WIoU v3 loss. Sci Rep 16, 6441 (2026). https://doi.org/10.1038/s41598-026-37473-3
Trefwoorden: bouwafval, recycling AI, objectdetectie, slimme steden, diep leren