Clear Sky Science · nl
Aanpassingen in het looppatroon bij lopen met een rollator bij ouderen: een hoofdcomponentenanalyse van spatiotemporele en kinematische parameters
Waarom lopen met een slimme rollator ertoe doet
Naarmate mensen ouder worden, wordt lopen vaak langzamer en minder stabiel, wat het risico op vallen, botbreuken en verlies van zelfstandigheid vergroot. Veel ouderen gebruiken een rollator om mobiel te blijven, maar deze hulpmiddelen kunnen ook subtiel veranderen hoe ze zich voortbewegen—soms op manieren die niet goed begrepen zijn. Deze studie onderzoekt hoe een geavanceerde “slimme rollator” het looppatroon van gezonde oudere volwassenen beïnvloedt, met behulp van gedetailleerde bewegingsmetingen en geavanceerde statistiek om te scheiden welke veranderingen door veroudering komen en welke door het apparaat zelf worden veroorzaakt.
Hoe veroudering en loophulpmiddelen samenhangen
Vallen is een groot gezondheidsprobleem op latere leeftijd: ongeveer een op de drie mensen boven de 65 valt minstens één keer per jaar. Om dit risico te verlagen, schrijven zorgverleners vaak rollators voor. Standaardrollators zijn echter niet altijd gemakkelijk te manoeuvreren en kunnen, bij verkeerd gebruik, zelfs meer wiebelen veroorzaken. Ingenieurs ontwikkelen daarom slimme rollators met sensoren, motoren en regeltechniek om soepelere ondersteuning en sturing te bieden. Voordat zulke apparaten breed worden ingezet bij mensen met aandoeningen zoals een beroerte of de ziekte van Parkinson, moeten onderzoekers begrijpen hoe ze lopen veranderen bij anderszins gezonde ouderen. Dat “schone” beeld vormt de basis om later vast te stellen of patiënten vooruitgaan, compenseren of nieuwe, mogelijk nadelige bewegingsgewoonten aannemen.
Een nadere blik op lopen met een slimme rollator
Het team bestudeerde 14 oudere vrijwilligers van midden zestig zonder loopstoornissen. Elke persoon maakte twee eenvoudige 10‑meter wandelingen: één zonder hulpmiddel en één met een slimme rollator genaamd de UFES vWalker. Deze robotische rollator heeft krachtsensoren, laserscanners en wielen die door software worden aangestuurd zodat de duwkracht van de gebruiker wordt omgezet in een veilige, lage topsnelheid van 0,4 meter per seconde. Terwijl de deelnemers liepen, registreerde een draagbaar motion‑capturepak met kleine sensoren op bekken, dijen, schenen en voeten hun loopsnelheid, stapduur, stapbreedte en hoe heup-, knie‑ en enkelgewrichten door de loopcyclus bewogen.
Wat veranderde bij gebruik van de rollator
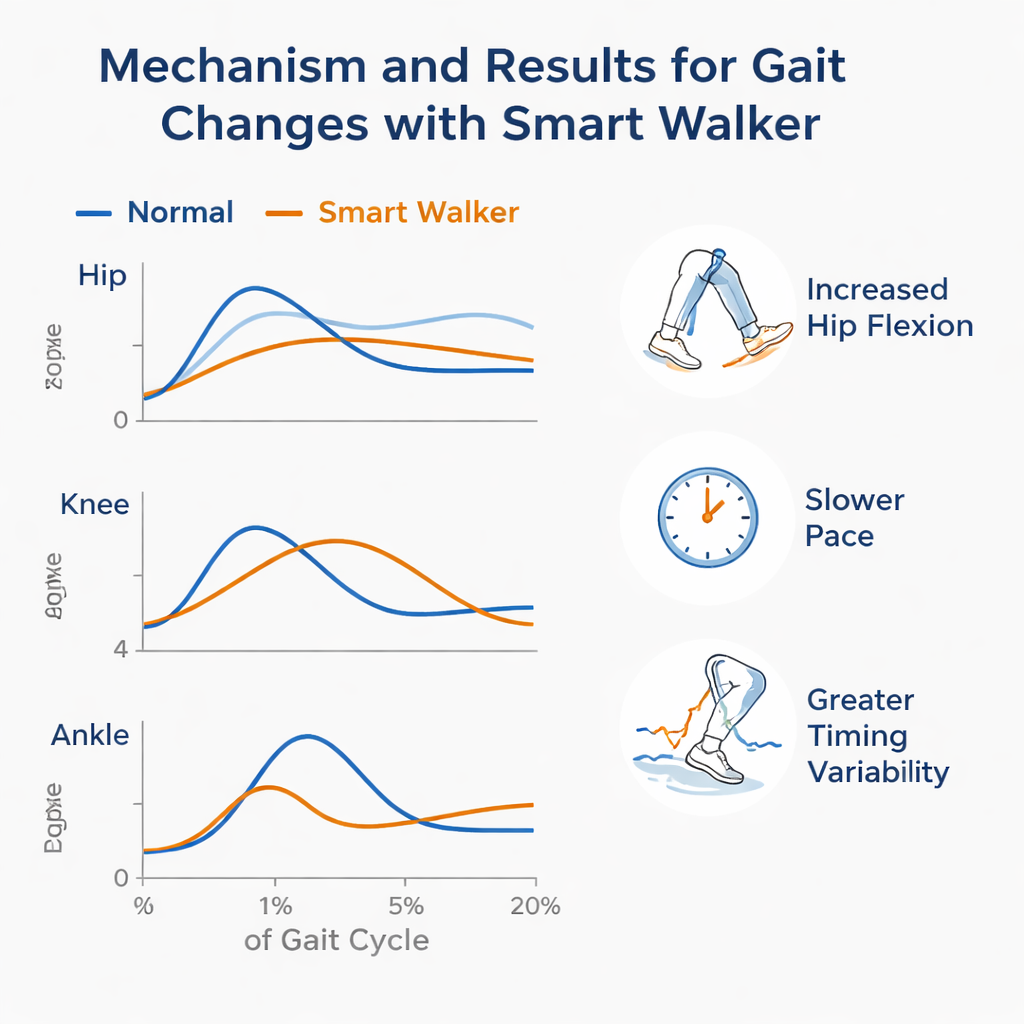
Bij gebruik van de slimme rollator bewogen deelnemers langzamer, maakten ze kortere en iets smallere stappen en brachten ze meer tijd met beide voeten op de grond door. De timing van de opeenvolgende stappen werd ook variabeler. Gewrichtshoeken veranderden eveneens: de heupen bleven gedurende het lopen meer geflecteerd, in een voorovergebogen houding, terwijl de knieën tijdens de zwaaifase minder gebogen waren. Veel enkel‑ en heupbewegingen namen toe, wat de gebogen houding weerspiegelde die mensen aannamen om de onderarmsteunen van de rollator vast te houden. Deze verschuivingen waren niet willekeurig. Met een statistische techniek genaamd hoofdcomponentenanalyse groepeerden de onderzoekers gerelateerde metingen in bredere “domeinen” zoals tempo, ritme, symmetrie, steunbasis en gewrichtsbeweging. Bij normaal lopen verschenen duidelijke domeinen die overeenkomen met eerdere verouderingsstudies, maar lopen met rollator leverde een ander patroon op, inclusief nieuwe domeinen die specifiek verband houden met hoe het been zwaait en hoe stappen worden gegenereerd wanneer het lichaamsgewicht deels door het apparaat wordt gedragen.
Verborgen patronen in hoe we lopen
Door standaard stap‑voor‑stapmetingen te combineren met gewrichtsbewegingsdata, toonde de analyse hoe verschillende onderdelen van het lopen op elkaar zijn afgestemd. Bij normaal lopen vormden tempo en variabiliteit één belangrijk domein, terwijl ritme, symmetrie en steunbasis andere domeinen vormden; het toevoegen van gewrichtshoeken splitste aparte bewegingspatronen voor heup, knie en enkel uit. Met de slimme rollator daarentegen werden knie‑ en enkelbewegingen tijdens de vroege standfase sterk gekoppeld aan de loopsnelheid, terwijl heup‑ en kniebewegingen tijdens het zwaaien van het been gekoppeld waren aan verschillen tussen linker‑ en rechterstappen. Een ander nieuw domein, stapdynamiek genoemd, bracht samen hoe staplengte, timingverschillen en enkelafzetten interacteren wanneer de rollator wordt gebruikt. Deze apparatenpecifieke domeinen suggereren dat de slimme rollator meer doet dan alleen stabiliseren—hij vormt actief hoe de benen coördineren om elke stap te produceren.
Wat dit betekent voor veiliger lopen op leeftijd
Voor niet‑specialisten is de kernboodschap dat slimme rollators lopen langzamer en gecontroleerder kunnen maken, maar dat ze ook een voorovergebogen houding en een ander patroon van stap‑timing en beenbeweging aanmoedigen dan bij normaal lopen. Deze apparaatgestuurde veranderingen zijn niet per se slecht; op de korte termijn kunnen ze mensen een veiliger gevoel geven. Maar als revalidatieprogramma’s te lang vertrouwden op een slimme rollator zonder zorgvuldige aanpassing, zouden gebruikers een loopstijl kunnen “aanleren” die later moeilijk is af te leren. De auteurs betogen dat therapeuten en ontwerpers deze bevindingen moeten gebruiken om ondersteuningsniveau, handgreephoogte en trainingsdoelen bij te stellen, zodat slimme rollators fungeren als opstapjes naar veiliger, natuurlijker lopen—en niet als permanente krukken die nieuwe, minder efficiënte gewoonten verankeren.
Bronvermelding: Elias, A., Loureiro, M., Machado, F. et al. Gait adaptations to walker-assisted locomotion in elderly: a principal component analysis of spatiotemporal and kinematic parameters. Sci Rep 16, 6872 (2026). https://doi.org/10.1038/s41598-026-37448-4
Trefwoorden: slimme rollator, lopen bij ouderen, valpreventie, rehabilitatie‑robotica, draagbare bewegingssensoren