Clear Sky Science · nl
Veilige formatie-scaling en bewegingsplanning voor heterogene UAV–UGV-teams in drukke omgevingen
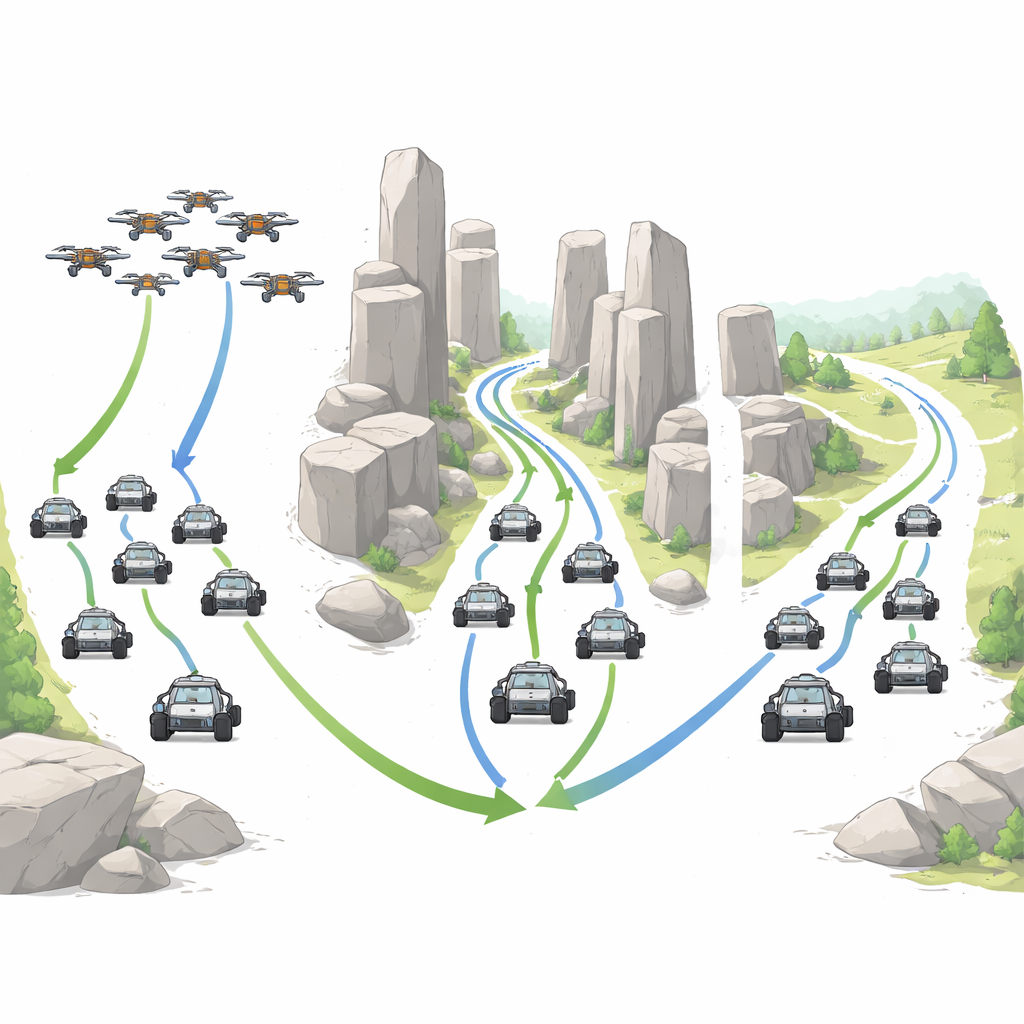
Robots die samenwerken in de lucht en op de grond
Stel je een zwerm kleine vliegende drones voor die boven een rampgebied verkennen, terwijl robuuste grondvoertuigen zich onderlangs door puin een weg banen, allemaal bewegend als één gecoördineerd team. Dit artikel onderzoekt hoe zulke gemengde robotgroepen bij elkaar gehouden kunnen worden in nauwe, met obstakels gevulde ruimtes zonder botsingen of hectische herplanning. De auteurs stellen een nieuwe benadering voor waarmee lucht- en grondrobots een stabiele formatie delen, door smalle openingen kunnen kruipen en toch snel en veilig hun doel bereiken.
Waarom heterogene robotteams moeilijk te coördineren zijn
Vliegdrones en grondvoertuigen gedragen zich heel verschillend. Drones schieten door de driedimensionale ruimte en worden gemakkelijk van koers geblazen door wind. Grondvoertuigen moeten rekening houden met begrensde draaicirkels en ruw terrein. Toch zouden veel echte missies — van zoek- en reddingsacties tot inspectie van infrastructuur — voordeel halen als deze robots samen als één driedimensionale groep kunnen reizen. Bestaande methoden behandelen vaak formatiebehoud en obstakelvermijding als gescheiden problemen. Wanneer de omgeving druk wordt, vallen formaties vaak uiteen en moeten ze later weer samengevoegd worden, wat tijd kost en de kans op botsingen vergroot.
Een nieuwe manier om de groep bij elkaar te houden
Om dit aan te pakken ontwerpen de auteurs een raamwerk dat zij RG–ASAPF noemen, dat de vormgeving van de groep en de bewegingen ervan nauw met elkaar koppelt. De kern is een wiskundige beschrijving van de formatie als een "starre" structuur: de gewenste afstanden tussen robots worden zo gekozen dat de totale vorm uniek bepaald is, als de stangen van een stabiel 3D-steiger. Elke robot gebruikt vervolgens een gedeelde regel om zijn beweging aan te passen zodat die afstanden worden hersteld en behouden, zelfs terwijl de formatie beweegt en draait. Deze regel is ontworpen voor zowel vliegende als rijdende robots en past zich online aan onzekerheden aan, zoals niet-gemodelleerde wrijving of kleine externe duwingen.
De formatie laten ademen door nauwe doorgangen
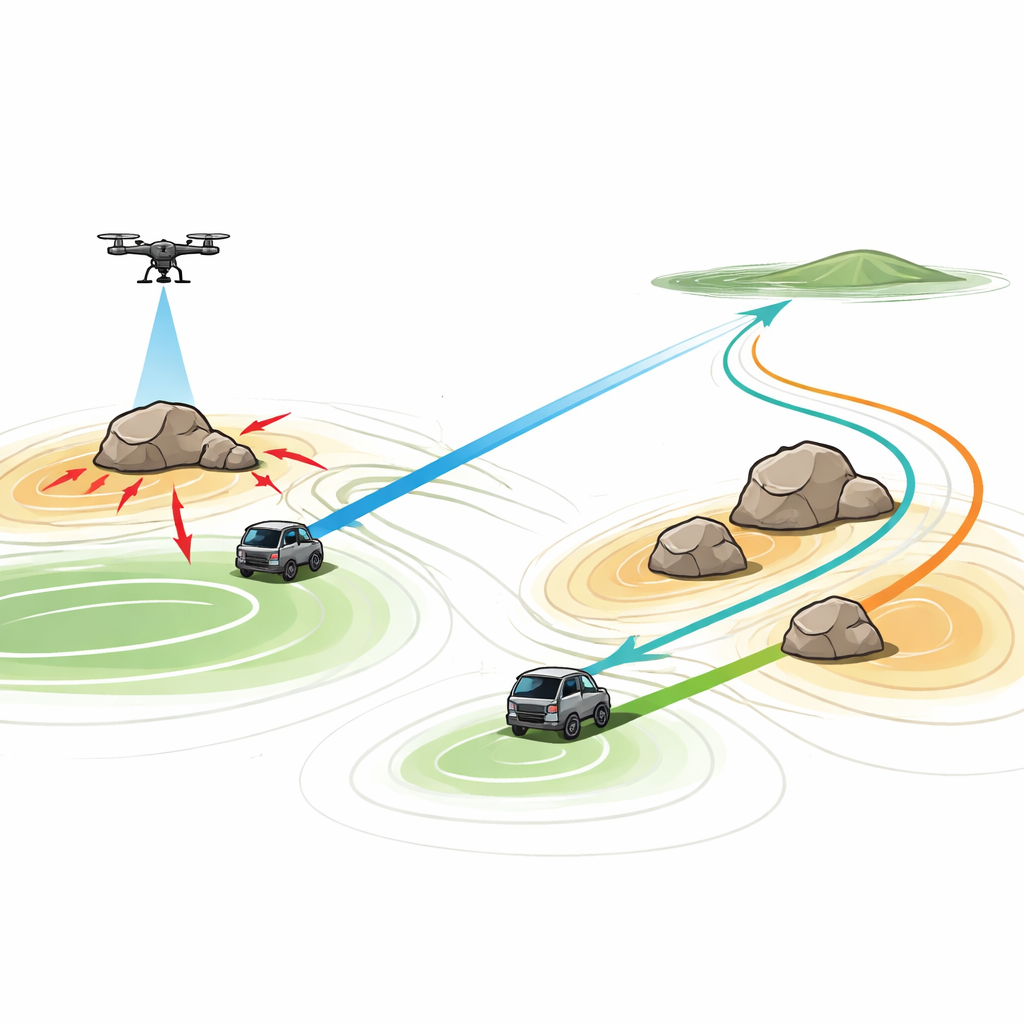
Werkelijke omgevingen zijn zelden open velden; ze zitten vol gebouwen, bomen, voertuigen en bewegende objecten. Een formatie die veilig is in open ruimte kan te groot zijn om door een smalle steeg of een dicht cluster van obstakels te gaan. De voorgestelde methode laat de formatie soepel schalen — zijn totale omvang verkleinen of vergroten — terwijl de basisstructuur behouden blijft. Het team introduceert een leidend grondvoertuig dat een pad plant met behulp van een kunstmatig potentiaalveld, waarbij het doel als aantrekker werkt en obstakels de formatie wegduwen. In tegenstelling tot traditionele potentiaalvelden, die vast kunnen lopen in doodlopende plekken of haperende bewegingen kunnen veroorzaken, stemt hun "adaptieve veilige" versie continu af hoe sterk obstakels de robots afstoten, zodat ze op veilige afstand blijven zonder overdreven voorzichtig of vast te raken.
Slimmere routes door rommel en beweging
Het potentiaalveld is verder verfijnd zodat het totale "landschap" van aantrekking en afstoting altijd zijn laagste punt bij het doel heeft. Dit helpt voorkomen dat de formatie vastloopt op ongemakkelijke plekken tussen obstakels. De sterkte van het afstotende effect wordt on-the-fly aangepast met een eenvoudige leerregel ontleend aan vroege neurale netwerktraining. Wanneer robots te dicht bij obstakels komen, groeit de afstoting automatisch; bij ruime vrijligging ontspant die weer. Als de omgeving zo krap wordt dat zelfs een verkleinde formatie niet veilig kan passeren, activeert de methode een noodprocedure: het team pauzeert kort, vergroot een denkbeeldige veiligheidscorridor en plant een veiliger route om het probleemgebied heen voordat het verdergaat.
Testen in virtuele werelden
Om te onderzoeken hoe goed de methode werkt voeren de auteurs uitgebreide computersimulaties uit met gemengde teams van drones en grondvoertuigen. Ze testen open gebieden met slechts enkele obstakels, dichte doolhoven met veel barrières, scènes met bewegende obstakels en formaties die moeten transformeren naar complexere 3D-vormen zoals een hexagonale prisma. In al deze gevallen blijft de formatie in drie dimensies bij elkaar, vermijdt veilig statische en bewegende obstakels en past zijn grootte aan waar nodig. De robots volgen vloeiende, efficiënte paden in plaats van zigzaggende omwegen. Vergeleken met diverse populaire planningsmethoden — inclusief klassieke en verbeterde potentiaalvelden, particle swarm-optimalisatie en zowel lineaire als niet-lineaire model predictive control — vindt de nieuwe aanpak doorgaans kortere, soepelere en energiezuinigere paden, terwijl ze ook sneller berekent dan zware optimalisatiegebaseerde technieken.
Wat dit betekent voor missies in de echte wereld
Voor een niet-specialist is de kernboodschap dat het artikel laat zien hoe gemengde teams van vliegende en rijdende robots zich kunnen bewegen als één flexibel lichaam door rommelige 3D-ruimtes. In plaats van de formatie te verbreken zodra obstakels verschijnen, kan de groep buigen, krimpen en zich heroriënteren terwijl hij coherent en veilig blijft. Dit kan zich vertalen in snellere, betrouwbaardere robotondersteuning tijdens rampen, industriële inspecties en beveiligingspatrouilles. Hoewel het huidige werk in simulaties is aangetoond en afhankelijk is van een aangewezen leidend voertuig, schetsen de auteurs vervolgstappen naar robuustere teams en experimenten in de echte wereld, en brengen ze de visie van nauw gecoördineerde lucht–grond-robotzwermen dichter bij de praktijk.
Bronvermelding: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Trefwoorden: multi-robotformatie, UAV UGV samenwerking, obstakelvermijding, bewegingsplanning, zwermrobotica