Clear Sky Science · nl
Een teleoperatie-exoskelet voor de bovenste extremiteit met traploze armlengte-parameterisatie en adaptieve krachtgeactiveerde impedantiemenging
Veiliger hands-on werk van op afstand
Veel van de gevaarlijkste taken op aarde — en in de ruimte — vragen nog steeds om menselijke oordeelsvorming en behendigheid. Denk aan het repareren van een beschadigde nucleaire installatie, het hanteren van explosieven of het stabiliseren van een ruimtevaartuig. Deze studie presenteert een nieuw type aangedreven armbovendekskelet waarmee een persoon een verre robotarm kan besturen alsof het de eigen arm is, terwijl hij op veilige afstand blijft. Het apparaat richt zich op het laten bewegen en “voelen” van de robot als een natuurlijke verlenging van het lichaam van de drager, zelfs wanneer het zich aanpast aan verschillende armlengtes en veranderende krachten in de omgeving.
Waarom afstandsarmen ertoe doen
Robots werken al onder water, in rampgebieden en binnen reactorkernen, maar de meeste zijn ofwel voorgeprogrammeerd of worden gestuurd met eenvoudige joysticks. Dat beperkt wat ze kunnen doen als de omstandigheden plotseling veranderen. Teleoperatiesystemen — waarbij een persoon een afstandsrobot in realtime bestuurt — bieden een middenweg en combineren menselijke besluitvorming met robotkracht en bereik. Eerdere systemen konden gereedschap verplaatsen, maar misten vaak nauwkeurige terugkoppeling over krachten en konden zich niet gemakkelijk aanpassen aan verschillende lichaamsmaten van gebruikers. Het resultaat was houterige beweging, een slechte ‘voelbaarheid’ en extra belasting voor zowel de operator als de machine.
Een draagbare robotarm die echt past
Het team ontwierp een draagbaar exoskelet voor de bovenste extremiteit met zeven aangedreven gewrichten die overeenkomen met schouder, elleboog en pols. Lichtgewicht materialen zoals koolstofvezel en aluminium houden het apparaat responsief in plaats van zwaar en traag. Een belangrijke innovatie is dat de lengte van zowel de bovenarm als de onderarm van het exoskelet traploos instelbaar is, niet in een paar vaste stappen. Schuifrails met ingebouwde elektrische sensoren meten continu de daadwerkelijke armlengte van de drager en voeren die informatie in een digitaal lichaamsmodel. Daardoor past het apparaat zijn interne geometrie automatisch aan iedere persoon aan, wat het draagcomfort verbetert en de bewegingen van de robot dichter bij de bedoelingen van de mens brengt. 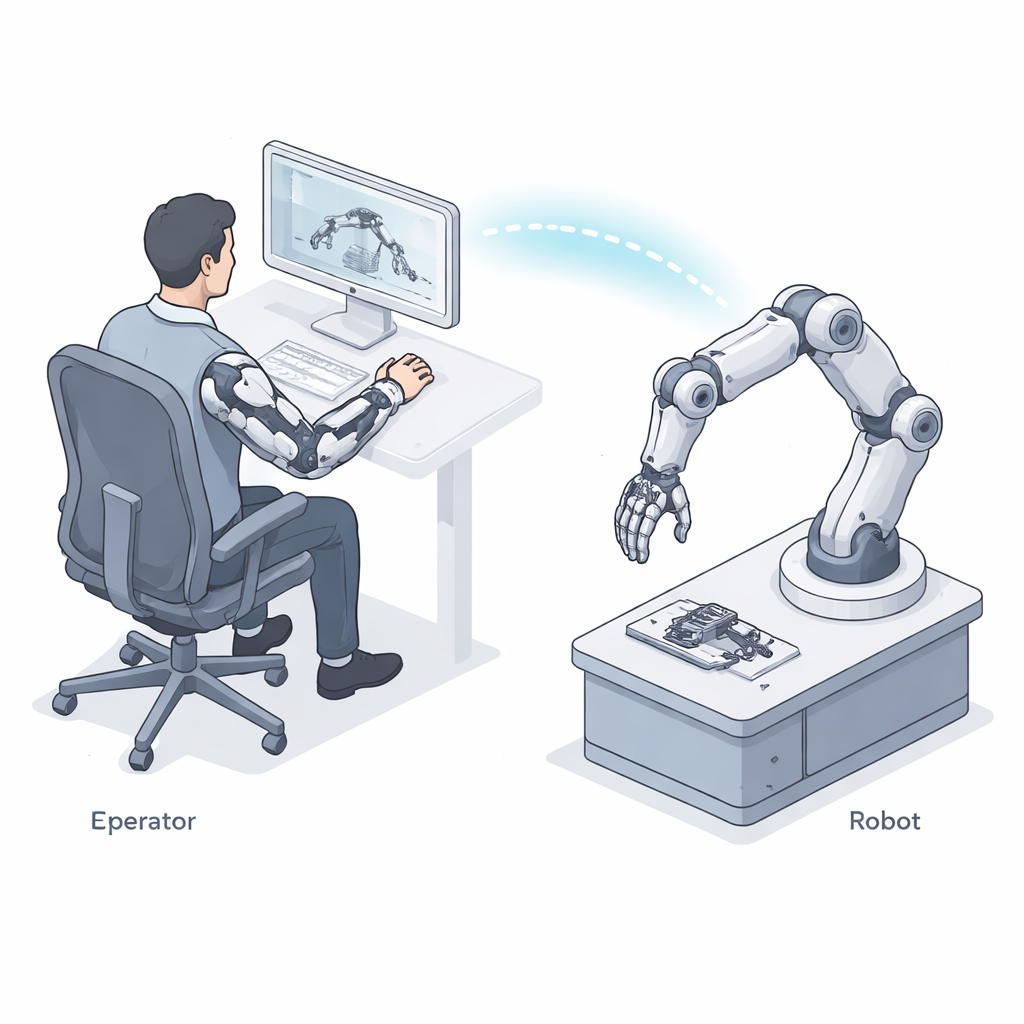
Meebewegen met het lichaam, niet ertegenin
Menselijke schouders draaien niet alleen als scharnieren; het schouderblad glijdt ook over de ribbenkast. Veel exoskeletten negeren dit en raken in conflict met natuurlijke bewegingen, wat ongemak veroorzaakt. Dit ontwerp voegt een passief module toe met meerdere extra vrijheidsgraden die stilletjes de subtiele verschuivingen van de schouder en het bovenlichaam volgt, waardoor druk op huid en gewrichten vermindert. Tegelijkertijd zijn de aangedreven gewrichten zo afgestemd dat hun koppel — draaiende kracht — onder veilige limieten voor menselijk weefsel blijft. Noodstoppen en blokkadedetectie ronden de veiligheidsvoorzieningen af, zodat het systeem snel kan reageren als er iets misgaat.
Een slimmer manier om contact te voelen
Voorbij de mechanica richten de auteurs zich op wat de drager ervaart. Wanneer de afstandsrobot iets raakt of duwt — een wand, een gereedschapshandgreep of een ander object — worden die krachten terugvertaald door het exoskelet zodat de gebruiker weerstand voelt. Het regelsysteem mengt twee behoeften die normaal in conflict zijn: nauwkeurige tracking van de bewegingen van de operator en zacht, compliant gedrag wanneer contactkrachten groot worden. Bij lage krachten gedraagt het systeem zich stijf en precies en volgt het de armbaan van de drager nauwgezet. Naarmate de krachten een veiligheidsdrempel overschrijden, verzacht de regeling automatisch, waardoor er enige meegevendheid ontstaat zodat stoten worden gedempt in plaats van schokkend. De auteurs gebruiken energie-gebaseerde wiskundige instrumenten om aan te tonen dat dit menggedrag stabiel blijft in plaats van te ontaarden in oscillaties. 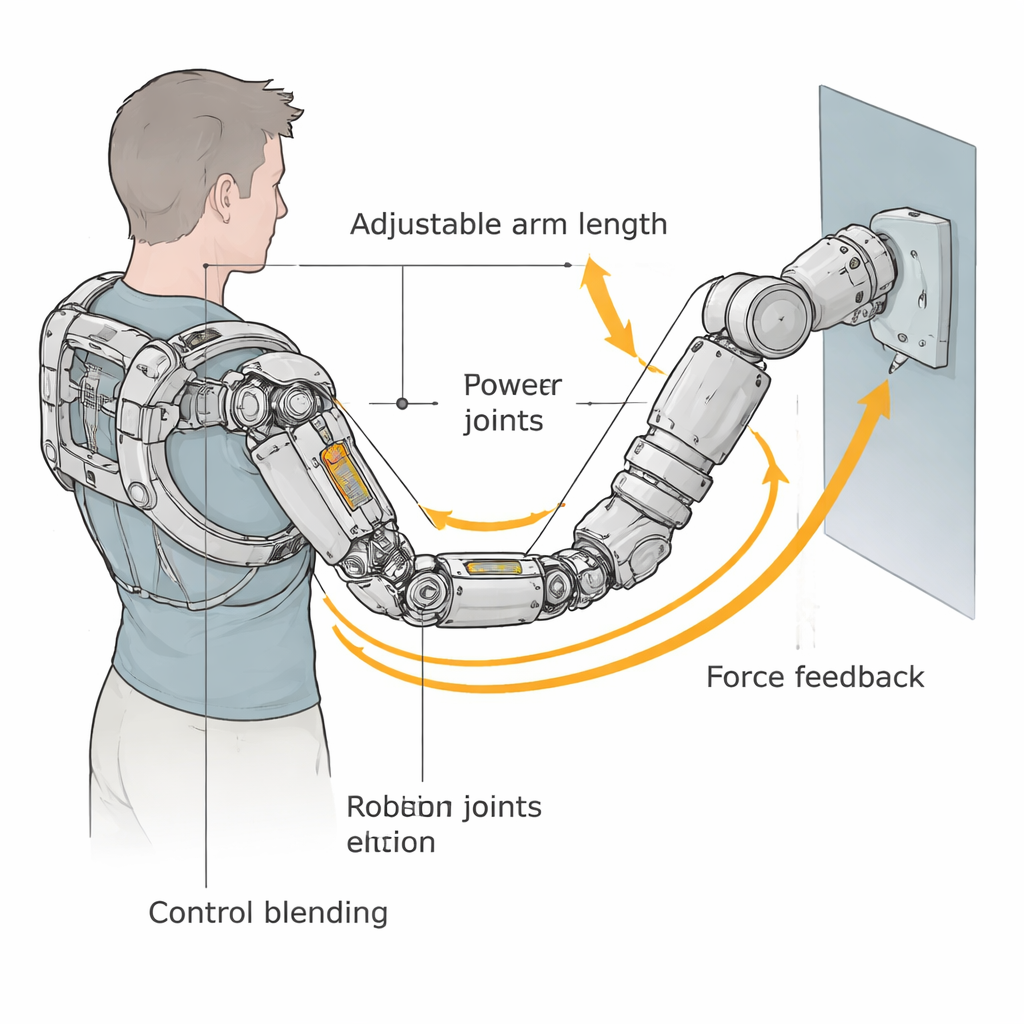
Het systeem op de proef gesteld
Om het exoskelet te evalueren koppelden de onderzoekers het aan een veelgebruikte industriële robotarm. Wanneer een persoon met het exoskelet een figuur-acht in de lucht tekende, reproduceerde de afstandsrobot de beweging nauwkeurig, ondanks kleine communicatievertragingen. Extra tests onderzochten hoe goed de armlengtemeting werkte: spanningswaarden van de schuifsensoren kwamen overeen met fysieke metingen met fouten van minder dan enkele millimeters, zelfs na herhaaldelijk aan- en uittrekken. In gecontroleerde simulaties waarin de robot tegen een virtuele stijve wand drukte, verminderde het volledige regelschema de piekcontactkrachten met bijna 70 procent vergeleken met een basisopstelling, terwijl de trackingnauwkeurigheid in vrije beweging grotendeels behouden bleef.
Wat dit betekent voor werk en zorg in de praktijk
In praktische termen brengt dit onderzoek ons dichter bij afstandsrobots die net zo natuurlijk en veilig aanvoelen om te besturen als het bewegen van je eigen arm. Door een lichaamomsluitend verstelbaar frame te combineren met zorgvuldige tracking van menselijke bewegingen en slimme krachtfeedback die zich on-the-fly aanpast, belooft het systeem preciezere en minder vermoeiende teleoperatie in gevaarlijke omgevingen. Dezelfde technologie kan ook patiënten die herstellen van een beroerte dienen, waarbij therapeuten armbewgingen kunnen begeleiden en vastleggen terwijl patiënten levensechte ondersteuning en feedback ontvangen. Naarmate toekomstige versies signalen van spieren en oogfixatie integreren en van ervaring leren, kunnen dergelijke exoskelet-robotparen veelzijdige hulpmiddelen worden voor zowel extreme missies als alledaagse revalidatie.
Bronvermelding: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Trefwoorden: teleoperatie exoskelet, robotarmbesturing, krachtenfeedback, revalidatierobots, afdistantie gevaarlijke werkzaamheden