Clear Sky Science · nl
Realtime schatting van batterij-ladingsniveau en autonome oplaadstrategie voor dynamische energieopslag-laadrobot met uitgebreide Kalmanfilter
Waarom slimme robotbatterijen ertoe doen
Van magazijnkoeriers tot inspectierobots zijn mobiele robots slechts zo nuttig als hun batterijen toelaten. Als een robot verkeerd inschat hoeveel energie hij nog heeft, kan hij stil komen te staan ver van een lader, waardoor werk wordt onderbroken en de batterij mogelijk beschadigd raakt. Dit artikel presenteert een nieuwe manier voor robots om hun werkelijke batterijniveau in realtime te "weten" en om te beslissen wanneer en hoe ze zichzelf moeten opladen, zodat ze langer, veiliger en met minder menselijk toezicht kunnen werken.

Robots, drukke taken en belaste batterijen
In tegenstelling tot elektrische auto's die soepel over snelwegen rijden, hebben veel mobiele robots te maken met scherpe starts, stops en frequente veranderingen in werklast. Deze schokken veroorzaken snelle schommelingen in batterijstroom en -spanning, wat traditionele methoden om de resterende lading te schatten verwart. Eenvoudige methoden die batterijspanning aflezen of stroom integreren over tijd gaan vaak uit van rustige, stabiele omstandigheden en volgen niet hoe de batterij veroudert of opwarmt. Daardoor lopen hun schattingen weg, bouwen fouten zich op en kan de robot óf te vaak opladen óf de batterij te zwaar belasten, wat de levensduur verkort.
Een slimmer model van wat er in de batterij gebeurt
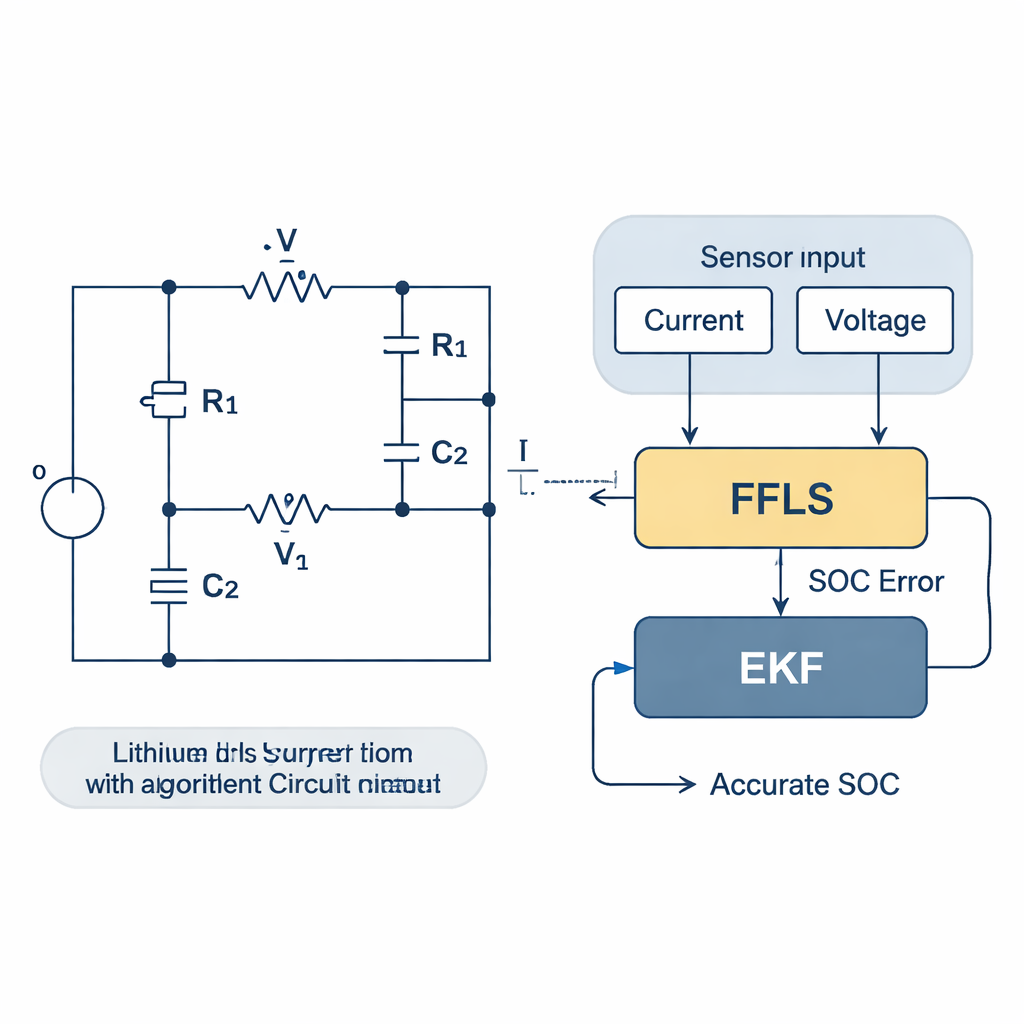
De auteurs pakken dit aan door de robot een realistischer beeld te geven van zijn lithiumijzerfosfaatbatterijpack. In plaats van de batterij te behandelen als een zwarte doos met één spanningswaarde, modelleren ze deze als een elektrisch netwerk met interne weerstand en twee "polarisatie"-takken die nabootsen hoe ionen zich in de cel verplaatsen en ophopen. Dit tweedegraads RC-model vangt snelle en langzame reacties op laadwisselingen op. De robot meet continu stroom en spanning en past deze signalen aan het model met een kleinste-kwadratenmethode die een "vergeetfactor" bevat — een rekentechniek om meer gewicht aan recente gegevens te geven en verouderde geschiedenis te laten vervagen wanneer de omstandigheden veranderen.
Het algoritme onderweg laten leren en aanpassen
Bovenop dit model passen de onderzoekers een uitgebreide Kalmanfilter toe, een veelgebruikt instrument om verborgen toestanden in ruisachtige data te volgen. Hier is de verborgen toestand de werkelijke staat van lading van de batterij. Terwijl de robot werkt, voorspelt de filter hoe de lading zou moeten veranderen op basis van het model en de gemeten stroom, en corrigeert die voorspelling vervolgens met de gemeten spanning. De kleinste-kwadratenmodule met vergeetfactor blijft belangrijke modelparameters online bijwerken, zodat de filter nooit vertrouwt op een verouderde, fabrieksgekalibreerde batterijbeschrijving. Slim is ook dat de onderzoekers een verband benutten tussen interne weerstand en een grootheid die polarisatiecapacitantie heet: als de temperatuur stijgt, daalt de weerstand en groeit de capaciteit. Door beide samen te volgen kan het systeem temperatuur effecten afleiden zonder fysieke temperatursensor en het model dienovereenkomstig aanpassen.
Robots leren wanneer en hoe ze moeten opladen
Nauwkeurige schattingen van de lading zijn maar de helft van het verhaal; de andere helft is hoe de robot ze gebruikt. De auteurs ontwerpen een autonome oplaadstrategie die zowel constant "bijvullen" als diepe ontladingen vermijdt. Ze definiëren boven- en ondergrenzen voor de lading: als de batterij onder een drempel zakt, geeft de robot prioriteit aan terugkeren naar een dock; als hij al dicht bij de bovengrens is, stelt hij opladen uit en werkt door. Binnen het veilige bereik laadt de robot op tijdens rustmomenten. Het systeem houdt ook elke cel in het batterijpack in de gaten en balanceert hun lading zodat geen enkele cel te vol raakt terwijl andere achterblijven, een belangrijke stap om voortijdige veroudering te voorkomen. Om aanmeren efficiënt te maken combineert de robot navigatie op kamerniveau met kortereeks infraroodgeleiding, waardoor routes en aanmeertijd worden ingekort.
Langer mee, betrouwbaardere robotenergie
In tests met openbare batterijdatasets, simulaties en echte robots schatte de nieuwe methode de staat van lading met ongeveer 98% nauwkeurigheid, duidelijk beter dan meerdere geavanceerde alternatieven op basis van deeltjesfilters, neurale netwerken en Transformers. Batterijen die met deze aanpak werden beheerd hielden hun lading beter over weken van gesimuleerd gebruik en doorstonden 15–40% meer laad-/ontlaadcycli dan bij concurrerende methoden. De interne weerstand nam langzamer toe, een indicatie van gezondere cellen, en robots brachten minder tijd door in het dock terwijl ze een betere batterijgezondheid behouden. Voor een leek is de conclusie dat deze techniek robots betere "verzorgers" van hun eigen batterijen maakt: ze kunnen hun energie preciezer beoordelen, slimmer kiezen wanneer ze opladen en stilletjes de werkelijke levensduur van kostbare batterijpacks verlengen zonder extra sensoren of zware rekenkracht.
Bronvermelding: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Trefwoorden: mobiele robots, toestand van lading van batterij, autonoom opladen, uitgebreide Kalmanfilter, lithiumijzerfosfaatbatterijen