Clear Sky Science · nl
YOLO-DC voor voertuigdetectie met deformeerbare convolutionele netwerken en cross-channel coördinaataandacht
Waarom het detecteren van auto’s met camera’s echt belangrijk is
Moderne steden vertrouwen op camera’s die drukke wegen bewaken, helpen verkeersopstoppingen te beheren en de weg bereiden voor zelfrijdende voertuigen. Maar het consequent herkennen van elk voertuig in die camerabeelden is verrassend lastig, vooral wanneer auto’s klein in de verte zijn, deels verborgen in files of vervaagd door regen, mist of duisternis. Dit artikel introduceert YOLO‑DC, een nieuw computerzichtsysteem dat gericht is op het snel en nauwkeurig opsporen van auto’s, bussen en andere voertuigen, zelfs onder rommelige reële omstandigheden en op apparaten met beperkte rekenkracht.
Het verkeersprobleem achter het onderzoek
Groeiende steden krijgen te kampen met volle wegen, meer ongevallen en stijgende emissies. Slimme transportsystemen beloven hulp door het verkeer in realtime te monitoren en zowel menselijke als autonome bestuurders te begeleiden. De kern is snelle, betrouwbare voertuigdetectie in video. Eerdere “twee‑fasen” algoritmen scannen beelden in meerdere stappen en kunnen zeer nauwkeurig zijn, maar zijn vaak te traag voor realtime gebruik op wegkantcamera’s of in auto’s. Nieuwere “single‑stage” systemen, zoals de YOLO (“You Only Look Once”)‑familie, ruilen wat complexiteit in voor veel hogere snelheid, waardoor ze in de praktijk populair zijn. Toch hebben ze nog steeds moeite met kleine, overlappende voertuigen en met zwaar weer dat details verbergt. YOLO‑DC bouwt voort op het nieuwste YOLOv8‑model en herontwerpt de interne lagen om beter met deze uitdagingen om te gaan.
Hoe YOLO‑DC meer ziet door slimmer te focussen
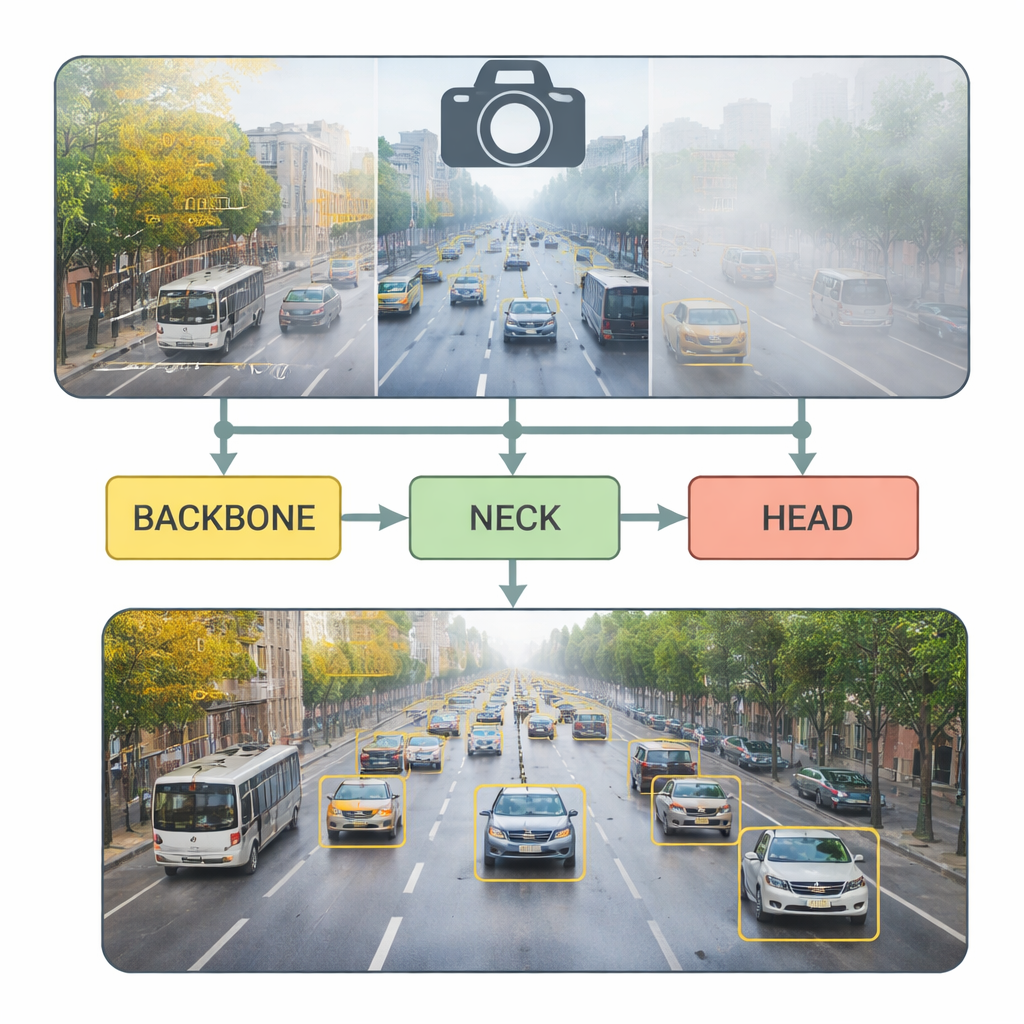
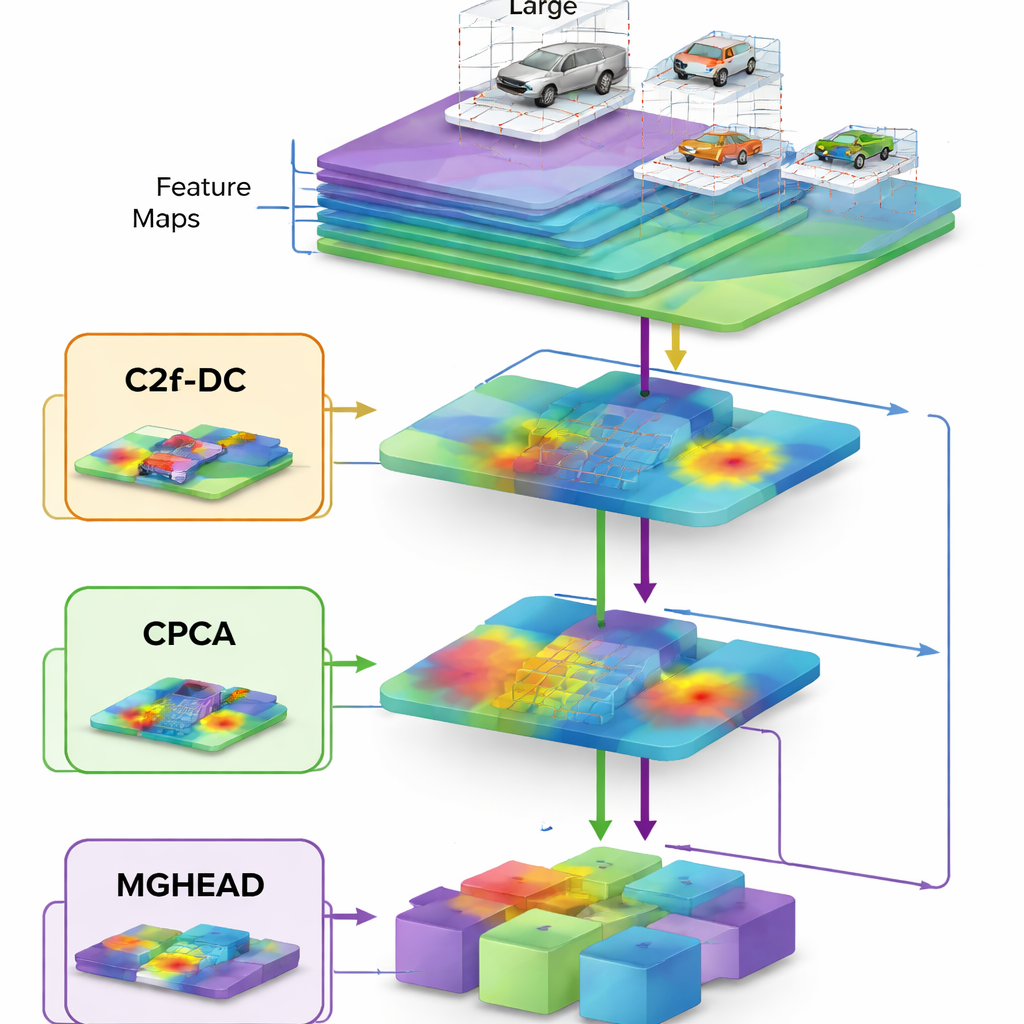
In het hart van YOLO‑DC staat een vernieuwd “backbone” netwerk, het deel dat eerst ruwe beelden omzet in abstracte kenmerken. De auteurs introduceren een mechanisme genaamd cross‑channel coördinaataandacht, dat het netwerk effectief leert niet alleen waar in het beeld te kijken, maar ook welke soorten visuele patronen meer gewicht verdienen. Gecombineerd met zogenaamde deformeerbare convoluties—filters die hun bemonsteringspatroon kunnen buigen om schuine of onregelmatig gevormde voertuigen te volgen—kan deze backbone zich beter aanpassen aan auto’s die onder verschillende hoeken, schalen en posities worden gezien. In plaats van elk wegvak gelijk te behandelen, leert het systeem de kenmerkende contouren en texturen te benadrukken die echte voertuigen onderscheiden van gebouwen, bomen of wegmarkeringen.
Kleine en verre voertuigen vastleggen zonder te vertragen
Het middenstuk van het model, bekend als de neck, is verantwoordelijk voor het samenvoegen van informatie uit grove, uitgezoomde weergaven met fijne, close‑up details. YOLO‑DC verbetert dit stadium op twee manieren. Ten eerste helpt een channel prior attention‑module het netwerk ruis te onderdrukken en subtiele aanwijzingen van kleine, verre voertuigen in het frame te benadrukken. Ten tweede vermindert een herontworpen blok, geïnspireerd door de lichtgewicht FasterNet‑architectuur, het aantal operaties door volledige convoluties slechts op een deel van de gegevens toe te passen en die vervolgens efficiënt te mengen. Dit zorgvuldige herontwerp verlaagt zowel het aantal parameters als de hoeveelheid geheugenverkeer, waardoor het model sneller draait terwijl de nauwkeurigheid daadwerkelijk verbetert—een ongebruikelijke maar zeer wenselijke combinatie voor edge‑apparaten zoals verkeerscamera’s en boordcomputers in voertuigen.
Voertuigen zien over veel maten en bij slecht weer
De laatste fase, of head, bepaalt waar objecten zich bevinden en wat ze zijn. YOLO‑DC introduceert hier multi‑scale gegroepeerde convoluties, waarbij feature‑maps worden opgesplitst in meerdere kanaalgroepen die elk verschillende filtergroottes gebruiken voordat ze opnieuw worden gecombineerd. Dit geeft de detector een rijker gevoel voor schaal, zodat hij tegelijk enorme bussen die het beeld vullen, middelgrote vrachtwagens en piepkleine auto’s die nauwelijks zichtbaar zijn in de verte kan herkennen. In uitgebreide testen op de UA‑DETRAC dataset, die wegscènes bevat onder bewolkte, zonnige, regenachtige en nachtelijke omstandigheden, evenaarde of overtrof YOLO‑DC de nauwkeurigheid van toptier detectors terwijl het slechts een fractie van hun rekenkracht gebruikte en honderden frames per seconde op moderne hardware verwerkte. Op de DAWN dataset, specifiek ontworpen voor mist, regen, sneeuw en zandstormen, leverde het nieuwe model vooral grote winst in zware regen en dichte mist, waar traditionele systemen vaak falen.
Wat de resultaten betekenen voor alledaagse wegen
Voor niet‑experts is de belangrijkste boodschap dat YOLO‑DC beter is in het “zien” van echt verkeer zoals het er in de praktijk uitziet: druk, rommelig en vaak verborgen door slecht weer of slechte verlichting. Door flexibele filters die voertuigvormen volgen te combineren met aandachtsmechanismen die zich richten op de meest informatieve regio’s, detecteert het systeem meer voertuigen, mist minder en werkt het snel genoeg voor live videoanalyse op bescheiden hardware. Dat maakt het een veelbelovende bouwsteen voor slimmer verkeersbeheer, betrouwbaardere ongevallendetectie en veiliger autonoom rijden—terwijl de verwerkingskosten laag genoeg blijven om breed inzetbaar te zijn in stedelijke omgevingen en toekomstige voertuigen.
Bronvermelding: Liu, Z., Zhu, M., Gao, B. et al. YOLO-DC for vehicle detection using deformable convolutional networks and cross-channel coordinate attention. Sci Rep 16, 6284 (2026). https://doi.org/10.1038/s41598-026-37094-w
Trefwoorden: voertuigdetectie, intelligente vervoerssystemen, YOLO, slechte weersomstandigheden, real-time visie