Clear Sky Science · nl
Dynamische keten voor planning van multi-AGV-systemen met laadbewuste bewegingsprofilering
Waarom magazijnrobots betere timing nodig hebben
Online winkelen heeft magazijnen vol goederen gebracht die snel, veilig en dag en nacht verplaatst moeten worden. Veel locaties vertrouwen tegenwoordig op vlootjes vloerrobots — Automated Guided Vehicles (AGV’s) — om rekken en pallets te vervoeren. Als deze robots echter worden ingepland met te simplistische aannames over hun bewegingen, kunnen ze tijd verspillen, breekbare pakketten laten schudden of zelfs botsingen riskeren. Dit artikel presenteert een nieuwe manier om vele AGV’s tegelijk te plannen en te coördineren door hun echte fysieke gedrag mee te nemen, met als belofte vloeiender verkeer en veiliger vracht in drukke magazijnen.
Robots die goederen verplaatsen, niet alleen aantallen
Moderne AGV’s doorkruisen al magazijnen, luchthavens en fabrieken en trekken karren of tillen rekken en pallets. De meeste bestaande software die deze vloot beheert, werkt op een hoog niveau: het beslist welke robot welke taak krijgt en grofweg welke route hij moet volgen. Om de wiskunde te vereenvoudigen gaat men er meestal van uit dat de reistijd tussen twee punten vast is, waarbij men negeert hoe snel een robot daadwerkelijk kan optrekken of afremmen, of hoe zwaar zijn lading is. De auteurs tonen aan dat deze verkorting problemen oplevert in de echte wereld. Robots kunnen bij kruisingen vroeger of later aankomen dan verwacht, wat de kans op opstoppingen, bijna-botsingen of plots remmen dat de lading doet schudden vergroot.
Realistische fysica toevoegen aan het schema
De onderzoekers tackelen deze kloof met een tweefasige aanpak die fysica en planning mengt. Eerst ontwerpen zij een Dynamic Traveling Time-schatting voor AGV’s, DTT-AGV genoemd. In plaats van een corridor als één tijdsblok te behandelen, splitst DTT-AGV elke beweging in fasen: optrekken, constant rijden en afremmen. Het gebruikt een eenvoudig mechanisch model van een AGV met een draagrek, waarbij het rek als een massa aan veren en dempers wordt gemodelleerd. Dit model legt vast hoe acceleratie en deceleratie ladingen kunnen laten slingeren of vibreren. Vanuit dit model berekent het algoritme hoe snel het voertuig veilig kan rijden voor een gegeven afstand en lading zonder limieten voor snelheid, krachten of vibratie te overschrijden, en levert zo een realistische reistijd voor elk segment van het pad.
Robots verhinderen dat ze neus-aan-neus komen te staan
Tweede introduceert het team een Arrival Time Chaining-methode, ATC-AGV, die meerdere robots op gedeelde paden coördineert. Zodra DTT-AGV heeft geschat hoe lang elk segment duurt, wijst ATC-AGV precieze aankomst- en vertrektijden toe bij elk knooppunt — kruisingen, bochten of overdrachtspunten — langs de route van elke robot. Het bouwt een tijds-"keten" bij elk gedeeld knooppunt, die een veilige ruimte tussen voertuigen garandeert en rekening houdt met de huidige robotstatussen, zoals of ze beladen, aan het opladen of aan het draaien zijn. Als een nieuw plan zou leiden tot twee AGV’s die een knooppunt te dicht in tijd bezetten, schuift ATC-AGV het schema van één robot net genoeg op om de veiligheidsmarge te herstellen. In feite verandert het de vloerrooster van het magazijn in een tijdsbewuste kaart die helpt botsingen te voorkomen voordat ze ontstaan.
Testen van vloeiendere bewegingen en zachtere ritten
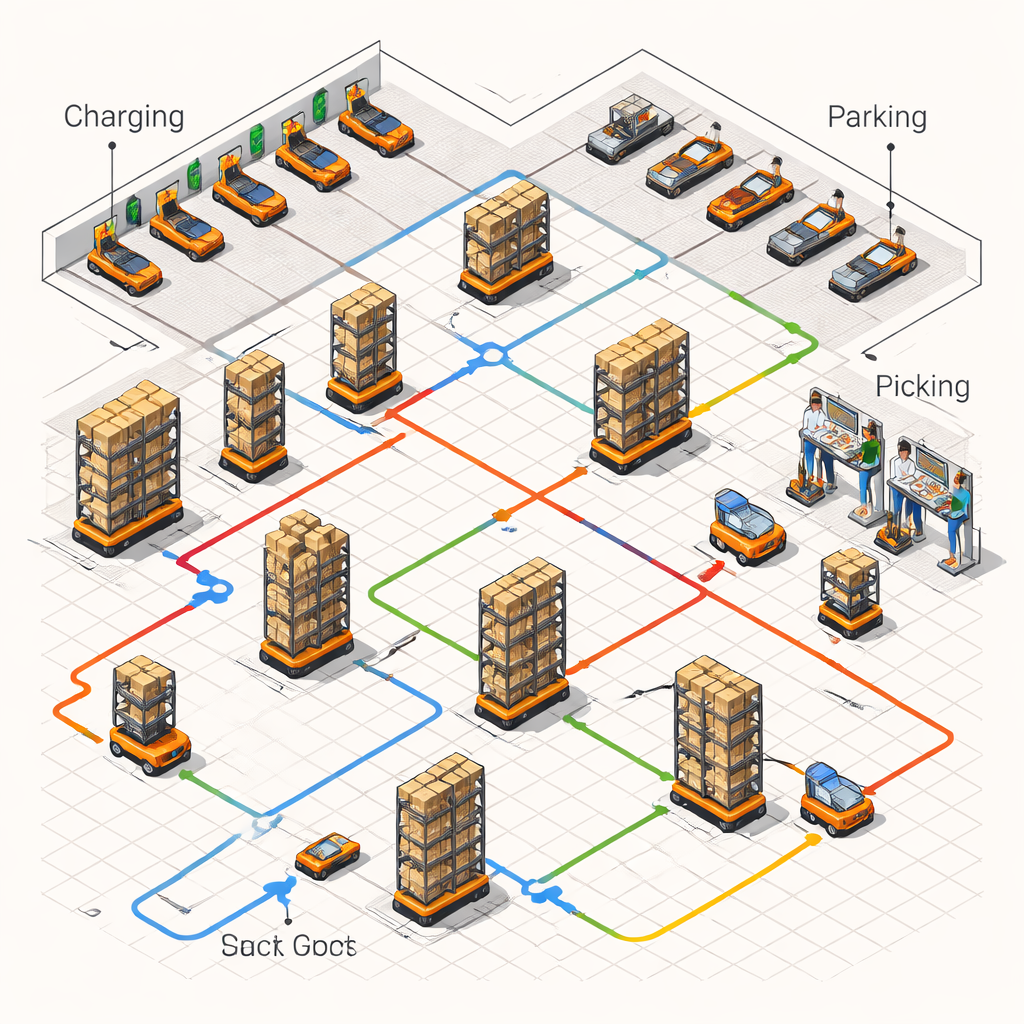
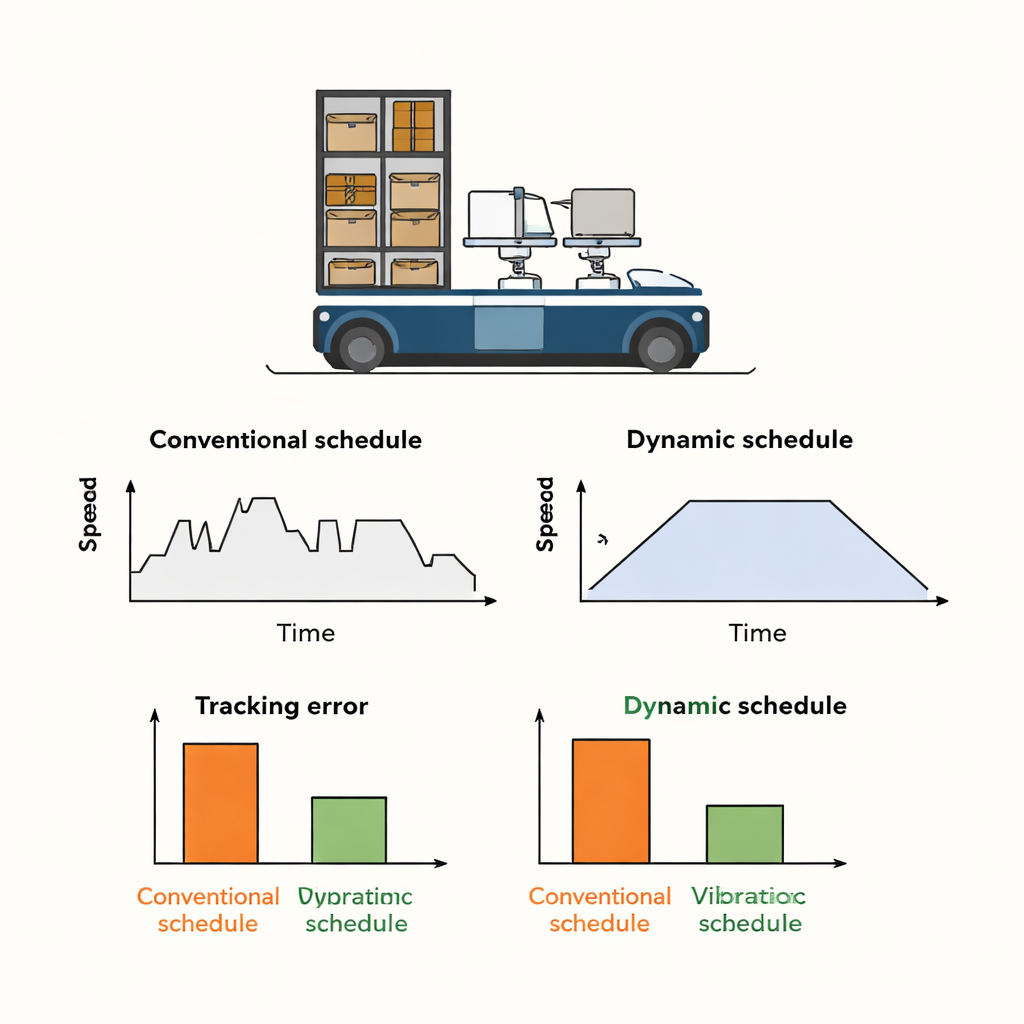
Om hun ideeën te testen simuleren de auteurs AGV’s in een grid-achtig cross-docking magazijn met laadzones, parkeerplaatsen en rekgebieden. Ze vergelijken hun planner met een conventionele methode die bijna constante snelheid veronderstelt en gedetailleerde bewegingsfasen negeert. In één test rijdt een robot langs een L-vormig pad en slaat dan 90 graden af. De traditionele aanpak veroorzaakt scherpe snelheidsveranderingen in de hoek, die de echte robot niet perfect kan volgen. Het resultaat zijn grote volgfouten — afwijkingen tussen waar de robot zou moeten zijn en waar hij daadwerkelijk is — en pieken in timingfouten op cruciale punten. Met de nieuwe planner wordt het pad opgesplitst in duidelijke acceleratie-, cruise- en remfasen. De gesimuleerde robot volgt nu zijn doelpad nauwkeurig, met veel kleinere fouten en vloeiendere bochten.
Zachter voor pakketten en toekomstbestendig
De tweede reeks tests richt zich op het gedrag van de lading zelf. Bij het gebruik van het conventionele schema ervaart de basis van de robot plotselinge stoten in acceleratie die het veerachtige gedrag van het rek activeren, wat sterke vibraties in de lading veroorzaakt. Met het dynamische, laadbewuste schema blijven acceleraties binnen een smaller bereik en veranderen ze geleidelijker. Gemeten over tijd dalen zowel de piek- als gemiddelde vibraties van de lading sterk, wat cruciaal is voor breekbare, gestapelde of onstabiele items. De auteurs onderzoeken ook hoe verwaarloosde factoren zoals wiel-vloer wrijving hun schattingen kunnen beïnvloeden en vinden dat, onder typische magazijnomstandigheden, de toegevoegde timingfout binnen de veiligheidsbuffers van hun algoritme blijft.
Wat dit betekent voor echte magazijnen
In eenvoudige termen leert dit werk AGV-planners om het echte bewegingsgedrag van de machines die ze aansturen te respecteren. Door reistijden en voorrangsbeslissingen te baseren op hoe snel robots daadwerkelijk kunnen optrekken, afremmen en verschillende lasten kunnen dragen zonder ze stuk te schudden, vermindert het voorgestelde raamwerk fouten bij padvolging, verlaagt het vrachtvibratie en verkleint het risico op conflicten bij kruisingen. Voor magazijnexploitanten en fabrikanten vertaalt dat zich naar vloeiender verkeer, veiliger hanteren van goederen en een fundament dat schaalt naarmate vlootgroottes toenemen en layouts complexer worden.
Bronvermelding: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Trefwoorden: geautomatiseerde geleide voertuigen, magazijnrobotica, botsingsvrije planning, bewegingsplanning, slimme logistiek