Clear Sky Science · nl
Perching van een quadrotor met adaptieve continu tweedegraadsregeling in aanwezigheid van onzekerheden
Waarom het vasthechten van drones aan muren ertoe doet
Stel je een kleine drone voor die niet alleen blijft zweven totdat de batterij leeg is, maar stilletjes op een muur kan landen als een vogel en daar urenlang kan blijven zitten om een brug, een akker of de rand van een bos te observeren. Dit artikel presenteert een nieuwe manier om dergelijke "perching"-drones te regelen, zodat ze naar een verticale oppervlakte kunnen vliegen, contact maken zonder terug te kaatsen en daar stabiel blijven, zelfs bij turbulente lucht of wanneer het gedrag van de drone niet volledig bekend is. Het werk pakt de uitdaging aan om een fragiel vliegend apparaat om te vormen tot een betrouwbaar, energiezuinig inspectiemiddel.
Van zwevende robots naar muurklimmende verkenners
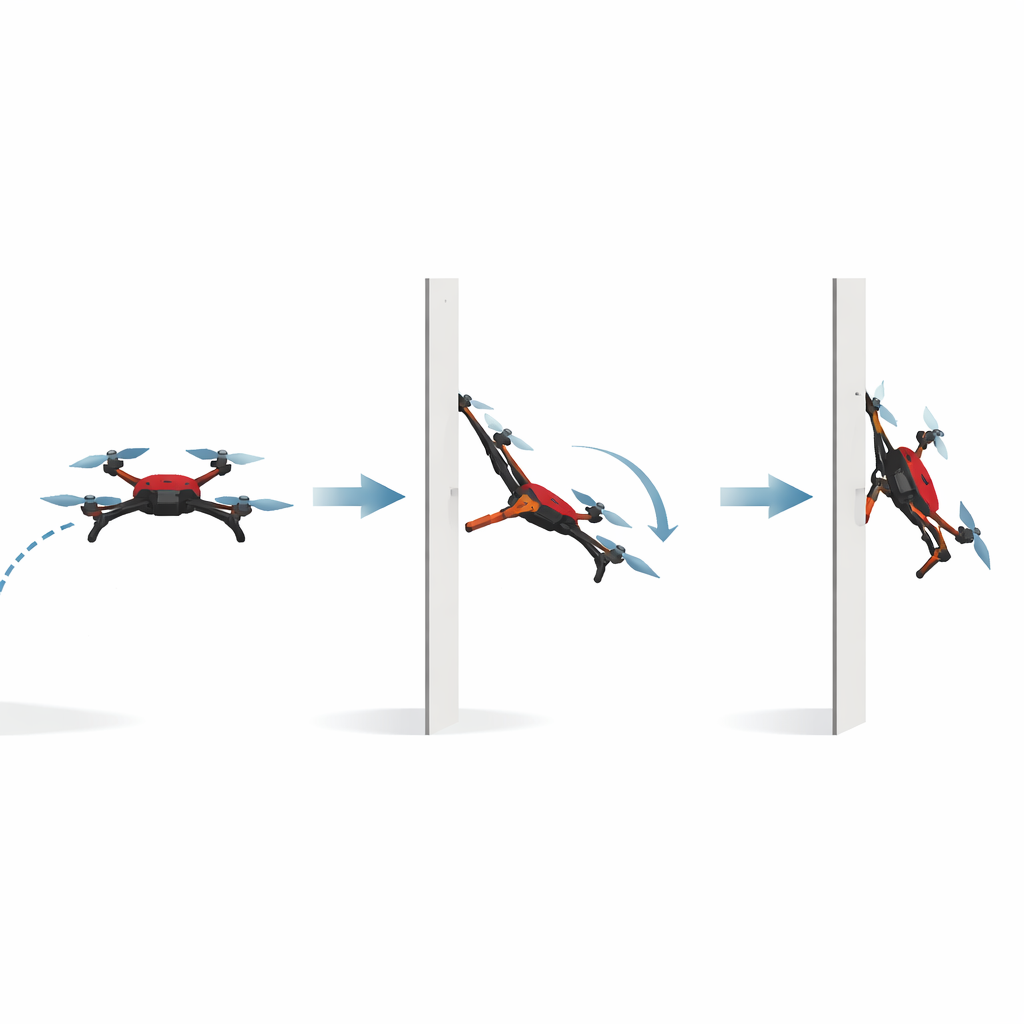
Kleine vierrotor-drones, of quadrotors, worden al gebruikt voor cartografie, constructie-inspectie, fauna-monitoring en precisielandbouw. Hun grootste beperking is echter uithoudingsvermogen: zweven verbruikt batterijvermogen. Perching op een oppervlak—zoals een muur, paal of de onderkant van een brug—laat een drone de meeste motoren uitschakelen terwijl zijn sensoren op hun plaats blijven voor langdurige observatie. Dit veilig doen is verre van eenvoudig. Tijdens de korte maar kritieke perching-manoeuvre moet de drone de muur naderen, aanraken en in een neus-naar-beneden houding draaien zonder te stuiteren, weg te schuiven of de controle te verliezen wanneer onverwachte windvlagen of modelleerfouten de beweging verstoren.
De uitdaging van een schone wandlanding
De auteurs bestuderen een quadrotor uitgerust met een lichte steunarm aan de voorkant, die fungeert als fysiek contactpunt met de muur. Terwijl de drone overgaat van vrij vliegen naar contact, zijn zijn positie (zijwaarts, voor-achter, op-en-neer) en zijn attitude (rol-, pitch- en yaw-hoeken) sterk gekoppeld: verandering in oriëntatie verandert hoe stuwkracht in beweging wordt omgezet, en de plotselinge reactiekracht van de muur kan de romp van de drone doen draaien. Daarbovenop werken effecten uit de echte wereld—zoals aerodynamische interacties nabij de muur, kleine constructie-onnauwkeurigheden en sensorruis—als onbekende storingen. Bestaande robuuste regeltechnieken kunnen drones stabiel houden, maar veroorzaken vaak hoogfrequente "chattering" in de motorcommando's, slijten hardware en garanderen slechts dat fouten geleidelijk afnemen in plaats van binnen een voorspelbare, korte tijdsperiode.
Een slimmere manier om te balanceren en aan te passen
Om deze problemen te overwinnen introduceert het artikel een adaptieve continu tweedegraads regelaar (ASOCC). In eenvoudige termen kijkt de regelaar niet alleen naar hoe ver de dronebeweging van het doel afligt, maar ook naar hoe snel die fout verandert, en vormt zijn commando's zodanig dat beide binnen een eindige tijd naar nul gaan. Een ingebouwde verstoringsobserver werkt als een realtime "ruisluisteraar": hij schat het netto-effect van onbekende krachten en modelafwijkingen en voedt die informatie terug in de regelwet. Cruciaal is dat de versterkingswaarden die bepalen hoe sterk de regelaar reageert, tijdens de vlucht worden aangepast op basis van deze schattingen in plaats van van tevoren vast te liggen. Omdat de regelsignalen soepel veranderen in plaats van abrupt te schakelen, vermindert het ontwerp sterk de chattering terwijl het toch hoge robuustheid behoudt.
De nieuwe regeling op de proef stellen
De onderzoekers analyseren eerst de wiskunde van hun observer-regelaarcombinatie en bewijzen, met behulp van energieachtige Lyapunov-functies, dat alle bewegingsfouten binnen een eindige tijd naar nul convergeren ondanks begrensde storingen. Vervolgens simuleren ze agressieve perching-scenario's in software, waarbij het dronemodel wordt blootgesteld aan windachtige krachten, willekeurige meetruis en opzettelijke fouten in zijn fysieke parameters. In deze proeven leidde ASOCC de drone door drie fasen—positionering, nadering en perching—terwijl positie- en oriëntatiefouten klein bleven en de regelsignalen glad waren. Vergeleken met meerdere geavanceerde alternatieven, waaronder populaire sliding-mode en modelgebaseerde regelaars, verminderde de nieuwe methode belangrijke volgfouten met ruwweg 35–55 procent.
Van simulatie naar een echte drone op een muur
Verdergaand dan simulaties bouwde het team een miniatuur perching-quadrotor met een commerciële vluchtcontroller en een 3D-geprint frame met een voorste arm. In binnenexperimentele tests vloog de drone autonoom naar een hellende wand, steeg naar ongeveer één meter en kantelde vervolgens neus-naar-beneden om contact te maken en bevestigd te blijven. Tijdreeksgegevens tonen dat hoogte, horizontale positie en pitchhoek allemaal dicht hun gewenste traject volgen, met slechts kleine rimpels door sensorruis. Ondanks goedkope hardware, communicatietijdvertragingen en actuatorenbeperkingen kaatste de drone niet weg en oscilleerde hij niet na de impact, wat aantoont dat ASOCC de rommelige realiteit van de vlucht kan verwerken.
Wat dit betekent voor toekomstige vliegende inspecteurs
Voor niet‑experts is de kernuitkomst eenvoudig: dit werk levert een regelstrategie die kleine drones in staat stelt betrouwbaar aan verticale oppervlakken te kleven en daar te blijven, zelfs wanneer de omstandigheden onvolmaakt zijn. Door soepel maar sterk corrigerend regelen te combineren met een adaptieve verstoringsobserver maakt de methode snel en nauwkeurig perchen mogelijk zonder de trilling en hardwarebelasting die bij veel robuuste regelaars voorkomen. Dit opent de deur naar langdurige luchtobservatie met lichtere batterijen, eenvoudigere platforms en grotere veiligheid—een belangrijke stap richting fleets van autonome "muurklevende" robots die stil toezien op infrastructuur, gewassen en natuurlijke omgevingen.
Bronvermelding: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Trefwoorden: quadrotor perching, adaptieve regeling, drone-inspectie, verstoringobserver, luchtrobotica