Clear Sky Science · nl
Een lichtgewicht YOLO-model voor nauwkeurige detectie van rode peperclusters bij robotische oogst
Slimmere robots voor pittige oogsten
Sichuan-peperkorrels, de kleine rode dopjes die de kenmerkende tintelende hitte van de Sichuan-keuken geven, zijn verrassend moeilijk te plukken. De vruchten groeien in dichte, stekelige trossen die gemakkelijk beschadigen, en met de hand oogsten is traag en seizoensgebonden werk. Deze studie introduceert een nieuw computer-visionsysteem, Red-YOLO genoemd, ontworpen om kleine, mobiele robots snel en nauwkeurig deze fragiele peperclusters in echte boomgaarden te laten herkennen, zelfs wanneer vruchten overlappen of achter bladeren verborgen zitten.
Waarom peeroogst zo lastig is
In tegenstelling tot grote, gladde vruchten zoals appels, groeien rode peperkorrels als vele kleine besjes dicht opeengepakt aan stekelige takken. De clusters kunnen sterk van elkaar verschillen: sommige zijn compact en dicht, andere los en verspreid, en allemaal worden ze omringd door verwarrende achtergronden van takken, bladeren en wisselend licht. Voor een robot is het essentieel om te zien waar de ene cluster eindigt en de andere begint — en hoe stevig elke cluster is gepakt. De grijpkracht en zelfs de maat van het grijpinstrument van de robot moeten variëren afhankelijk van hoe dicht de vruchten zitten, anders kunnen de fragiele olietakjes van de pepers barsten, wat de kwaliteit en waarde vermindert.
Het bouwen van een realistische beeldbibliotheek
Aangezien er geen openbare beeldverzamelingen voor dit gewas bestonden, moesten de onderzoekers eerst hun eigen dataset opbouwen. Gedurende twee groeiseizoenen in Hanyuan County, Sichuan, fotografeerden ze pepertakken in echte boomgaarden met een consumententelefoon en vastlegden 960 hoge-resolutie vierkante afbeeldingen onder verschillende zonhoeken en tijden van de dag. Elke afbeelding werd zorgvuldig met de hand gelabeld, waarbij onderscheid werd gemaakt tussen compacte en diffuse clusters. Om de computer variatie te leren verwerken, bewerkten ze veel beelden digitaal — ze pasten helderheid en contrast aan, spiegelden afbeeldingen horizontaal, vervormden sommige rasterpatronen en roteerden kijkhoeken. Dit vergrootte de trainingsset tot meer dan 4.300 afbeeldingen, terwijl een kleine set onaangeraakte foto’s apart werd gehouden om eerlijk te testen hoe het uiteindelijke systeem zou presteren.
Een slanker, scherper computer-visionsmodel
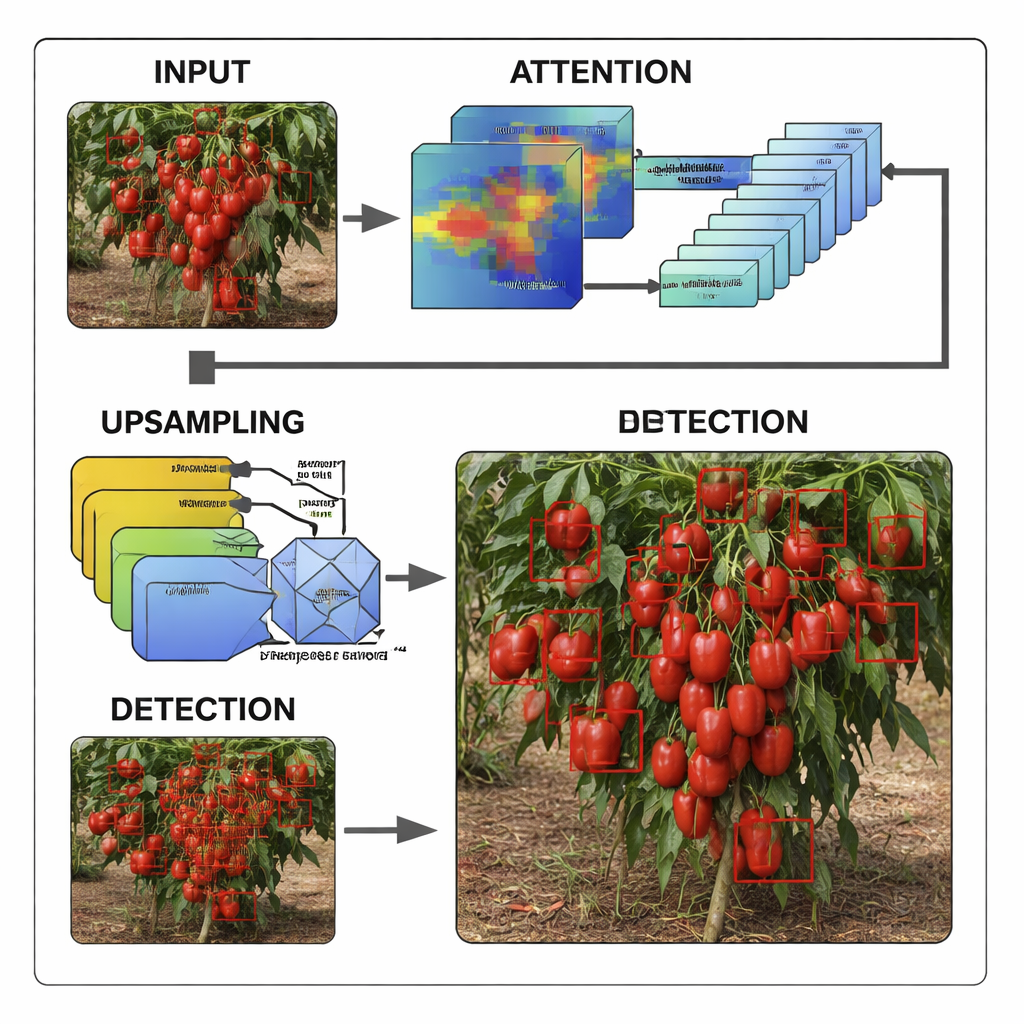
De kern van het systeem is YOLOv8, een veelgebruikt 'you only look once'-objectdetectiemodel dat objecten in één snelle doorgang vindt in plaats van in meerdere trage stappen. Het team sloot een zeer kleine versie van dit model op maat en hervormde het specifiek voor rode peperclusters. Ze voegden een attentie-module toe die het netwerk leert te focussen op kanalen en regio’s die waarschijnlijk vruchten bevatten, terwijl afleidingen zoals lucht, takken en verre bomen worden genegeerd. Ze herontworpen delen van het netwerk zodat informatie efficiënter hergebruikt wordt en onnodige berekeningen worden verminderd. Ook vervingen ze een eenvoudige herschaalstap door een slimmer upsampling-blok dat fijne details en randen rond overlappende pepers herbouwt, waardoor het model beter kan onderscheiden waar dicht opeengepakte clusters beginnen en eindigen.
Snelle, nauwkeurige visie voor kleine robots
Om te bepalen of deze aanpassingen de moeite waard waren, vergeleken de onderzoekers Red-YOLO met zowel oudere, zwaardere detectiesystemen als met een reeks moderne lichtgewicht YOLO-varianten. Traditionele meertrapsmodellen waren, hoewel krachtig, simpelweg te langzaam en te veeleisend voor compacte boomgaardrobots. Verschillende nieuwere YOLO-versies deden het beter maar hadden moeite met kleine, gedeeltelijk verborgen clusters of drukke achtergronden, waardoor ze vaak vruchten misten of bladeren voor pepers aanzagen. Red-YOLO vond een beter evenwicht: het detecteerde peperclusters met hogere algehele nauwkeurigheid en volledigheid dan alle vergelijkingsmodellen, terwijl de modelgrootte onder de drie miljoen parameters bleef en de rekbelasting laag genoeg voor ingebedde processors. Tests in uiteenlopende boomgaardomgevingen lieten zien dat Red-YOLO consequent clusters vond, zelfs wanneer vruchten klein, beschaduwd of sterk overlapt waren.
Van labmodel naar hulpje in de boomgaard
Voor niet-specialisten is de belangrijkste uitkomst praktisch: dit werk toont aan dat een compact, zorgvuldig afgestemd visionsysteem kleine oogstrobots een betrouwbare 'blik' in het veld kan geven. Met Red-YOLO kan een robot automatisch bepalen of het met een compacte of een diffuse cluster te maken heeft en vóór het plukken de grootte en grijpkracht van de grijper aanpassen, waardoor beschadiging afneemt en arbeid bespaard wordt. Hoewel de huidige studie zich richt op één pepersoort in één regio, kan dezelfde aanpak — het opbouwen van gerichte datasets en het verfijnen van slanke detectiemodellen — worden uitgebreid naar andere specialiteitengewassen. Naarmate deze visionsystemen robuuster en breder ingezet worden, kunnen ze helpen oogsten sneller, veiliger en consistenter te maken en zo een stabiele aanvoer van de pepers te waarborgen die aan veel van ‘s werelds favoriete smaken bijdragen.
Bronvermelding: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Trefwoorden: robotische oogst, peperdetectie, computer vision, lichtgewicht YOLO, slimme landbouw