Clear Sky Science · nl
Ontwikkeling van een slimme patiëntenzorgrobot met verbeterde autonome navigatie door padoptimalisatie op verpleegafdelingen
Robots die verpleegkundigen helpen, niet vervangen
Ziekenhuizen wereldwijd staan onder druk: meer oudere patiënten, meer chronische ziekten en personeel dat tot het uiterste is belast. Deze studie beschrijft een slimme patiëntenzorgrobot die niet bedoeld is om het verpleegkundig werk over te nemen, maar om routinematige controles en nachtelijke rondes in verpleegafdelingen stil en betrouwbaar uit te voeren. Door zelfstandig veilig en betrouwbaar te bewegen, kan deze robot verpleegkundigen helpen noodsituaties eerder te zien—zoals valpartijen of plotselinge koorts—terwijl hij hun werklast vermindert en het risico op ongevallen in drukke gangen en krappe deuropeningen verlaagt.
Waarom ziekenhuisgangen lastig zijn voor robots
Op het eerste gezicht lijkt een ziekenhuisgang eenvoudig: rechte lijnen, schone vloeren, regelmatige deuren. Voor een robot is het dat allerminst. Bedden, karren, muren en vooral smalle deurposten creëren krappe ruimtes waar zelfs een kleine fout tot een botsing kan leiden. Veel bestaande ziekenhuisrobots vertrouwen op een bundel sensoren en complexe hardware om hiermee om te gaan. Het team achter deze studie koos een andere weg: zij streefden ernaar een robot te bouwen die veilig kan bewegen met slechts één hoofdsensor—een tweedimensionale laserscanner die afstanden rondom meet—en een slimmere manier van routeplanning.

Een extra paar ogen voor de verpleegkundige
De onderzoekers ontwikkelden een slimme patiëntenzorgrobot (SPCR) op basis van een commercieel aangedreven onderstel. Op de behuizing monteerden ze een 3D-camera om valpartijen te detecteren en vitale functies af te lezen zonder de patiënt aan te raken, en een 2D-lasersensor bovenop die continu de omgeving in een volledige cirkel scant. In de robot zitten een ingebedde computer, batterijen, motorcontrollers en communicatielogica die het mogelijk maken met een controle-app te praten en de rijbeslissingen autonoom te nemen. De robot kan in alle richtingen bewegen, een cameraarm buigen om patiënten te bekijken en is ontworpen om meerdere uren achtereen te functioneren onder echte ziekenhuisomstandigheden.
Een slimmer kaartontwerp in plaats van meer hardware
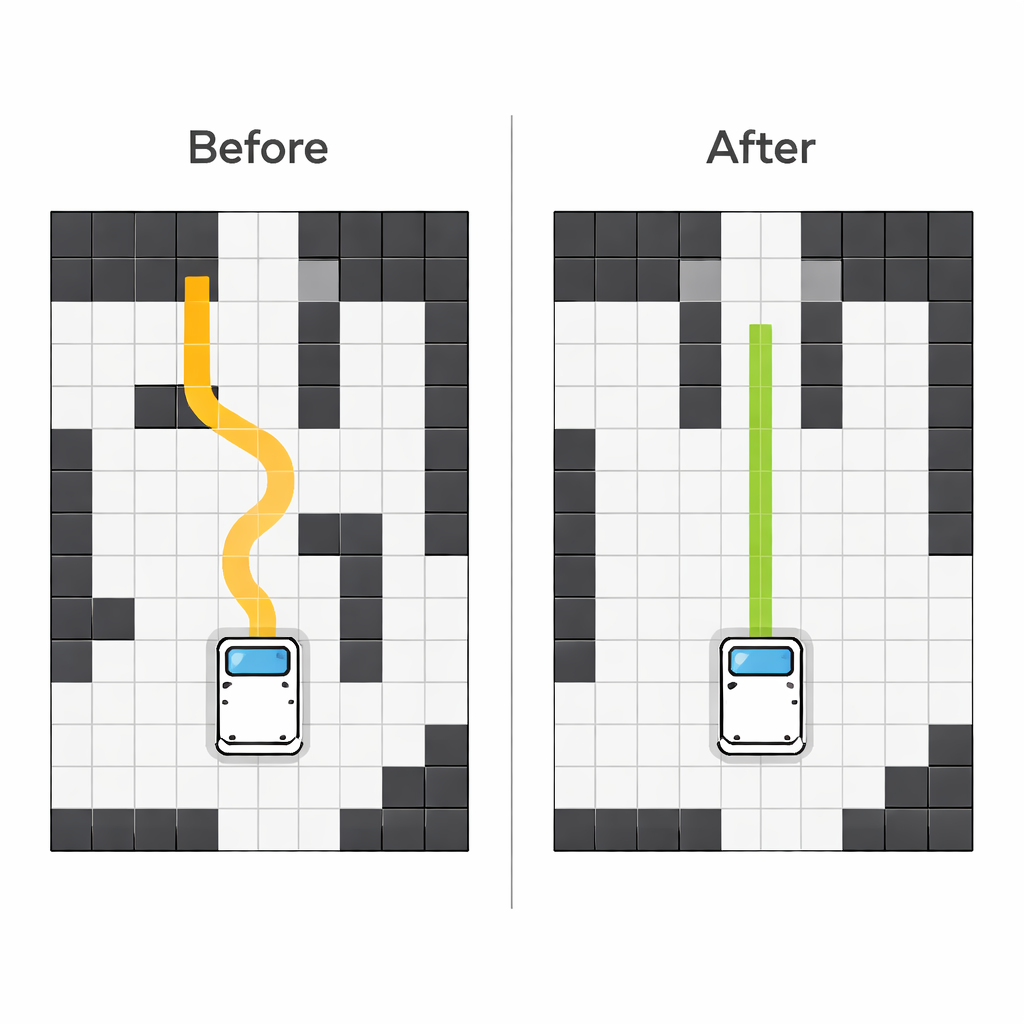
Om te navigeren heeft de robot eerst een kaart nodig die aangeeft waar hij wel en niet mag komen. Het team begon met nauwkeurige tekeningen van een ziekenhuisgang en converteerde deze naar een rasterkaart, waarbij elk klein vakje is gelabeld als vrije ruimte, muur of obstakel. In plaats van de kaart bij het origineel te laten, vormden ze die om zodat hij voorzichtiger is dan de werkelijkheid. Ze introduceerden "virtuele obstakelruimtes"—extra geblokkeerde gebieden die de robot subtiel wegduwen van risicovolle plekken zoals de randen van deuren en krappe hoeken. De routeplanningssoftware, gebaseerd op een verbeterde versie van het D* Lite-algoritme, zoekt vervolgens in deze veiligere kaart naar trajecten die scherpe bochten vermijden en de robot dichter bij het midden van smalle doorgangen houden.
De robot testen in echte verpleegafdelingen
Het systeem werd getest in een echte ziekenhuisgang die in drie secties was verdeeld met verschillende combinaties van gangen, deuren en obstakels. De robot moest tussen checkpoints reizen, door standaarddeuren van 90 centimeter breed passeren en muren en vaste objecten vermijden. Omdat de robot zelf ongeveer 76 centimeter breed is, had hij bij het passeren van deuropeningen slechts een paar centimeters ruimte aan elke kant—omstandigheden waarin veel robots moeite hebben. Door prestaties te vergelijken vóór en na het aanpassen van de rasterkaart, vonden de onderzoekers dat het slagingspercentage van de robot om zijn routes te voltooien zonder iets aan te raken in alle secties met meer dan 30 procent steeg, met vloeiendere paden en minder onnodige manoeuvres.
Wat dit betekent voor toekomstige patiëntenzorg
Voor niet-specialisten is de kernboodschap simpel: in plaats van robots vol te laden met steeds meer sensoren, laat deze studie zien dat zorgvuldig digitaal kaartontwerp en slimmere routeplanning ziekenhuissrobots zowel veiliger als praktischer kunnen maken. Een robot die 's nachts betrouwbaar door smalle deuren kan glippen, efficiënte paden volgt en stilletjes basiswaarden bij patiënten controleert, kan verpleegkundigen vrijmaken om zich te richten op menselijke zorg—het troosten van families, het nemen van complexe beslissingen en het afhandelen van noodsituaties. De auteurs zien dit werk als een fundament: toekomstige versies zullen meer sensoren en rijkere patiëntmonitoring toevoegen, met als doel betrouwbare, continu beschikbare robotassistenten die zich veilig bewegen in echte ziekenhuisomgevingen.
Bronvermelding: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Trefwoorden: ziekenhuisrobots, autonome navigatie, patiëntbewaking, LiDAR-mapping, routeplanning