Clear Sky Science · nl
Een gezamenlijke afstand–hoek–snelheids-schatting algoritme voor FDA-MIMO radar gebaseerd op graf-signaalverwerking
Slimmere radar voor een drukke, rumoerige wereld
Van zelfrijdende auto’s tot luchtverkeersbewaking: de moderne samenleving vertrouwt sterk op radarsystemen die objecten snel en betrouwbaar kunnen vinden en volgen. Naarmate de lucht, wegen en radiofrequenties voller worden, moet radar meerdere bewegende doelen onderscheiden temidden van sterke interferentie en ruis. Dit artikel introduceert een nieuwe manier om een krachtige klasse radars — genaamd FDA-MIMO-radars — helderder te laten zien in drie dimensies (afstand, richting en snelheid) door technieken te gebruiken uit een opkomend vakgebied dat graf-signaalverwerking heet.
Waarom deze nieuwe radararchitectuur ertoe doet
Traditionele phased-array-radars sturen hun bundels voornamelijk over de hoek, als het bewegen van een zaklamp naar links en rechts. Frequency Diverse Array (FDA)-radars werken anders: elk antenneelement zendt op een iets andere frequentie. Die kleine afwijking zorgt ervoor dat het bundelpatroon niet alleen van hoek afhankelijk is, maar ook van afstand en tijd. In combinatie met multiple-input multiple-output (MIMO)-technieken kunnen FDA-MIMO-radars in principe precies bepalen waar een doel zich in drie dimensies bevindt: hoe ver het weg is, onder welke hoek het zich bevindt, en hoe snel het beweegt. De uitdaging is al die informatie snel en nauwkeurig uit de ruwe echo’s te halen, vooral wanneer er veel doelen zijn en de signalen begraven liggen in ruis.
Radarecho’s omvormen tot een netwerkprobleem
De auteurs pakken deze uitdaging aan door de radarmetingen te herinterpreteren als signalen die leven op een graaf — een netwerk van knooppunten en verbindingen. Elk knooppunt in deze graaf staat voor een specifieke zend‑ontvangst-antennecombinatie in de FDA-MIMO-array, en de verbindingen vatten samen hoe signalen bij aangrenzende knooppunten ruimtelijk gerelateerd zijn. Door deze connecties zorgvuldig te definiëren bouwen ze een "adjacency-matrix" die beschrijft hoe echo’s zich over de array zouden moeten voortplanten als een doel op een bepaalde afstand en hoek zit. Wanneer het veronderstelde afstand–hoek-paar overeenkomt met het echte doel, rijmt het gemeten echopatroon vrijwel perfect met één van de natuurlijke trillingstoestanden van de graaf. In de praktijk betekent dit dat, na een graafgebaseerde versie van de Fourier-transformatie, de energie samenklontert tot een zeer scherpe piek bij één spectrale component. Het algoritme zoekt dergelijke pieken over een rooster van afstands- en hoekwaarden om te vinden waar doelen zich bevinden. 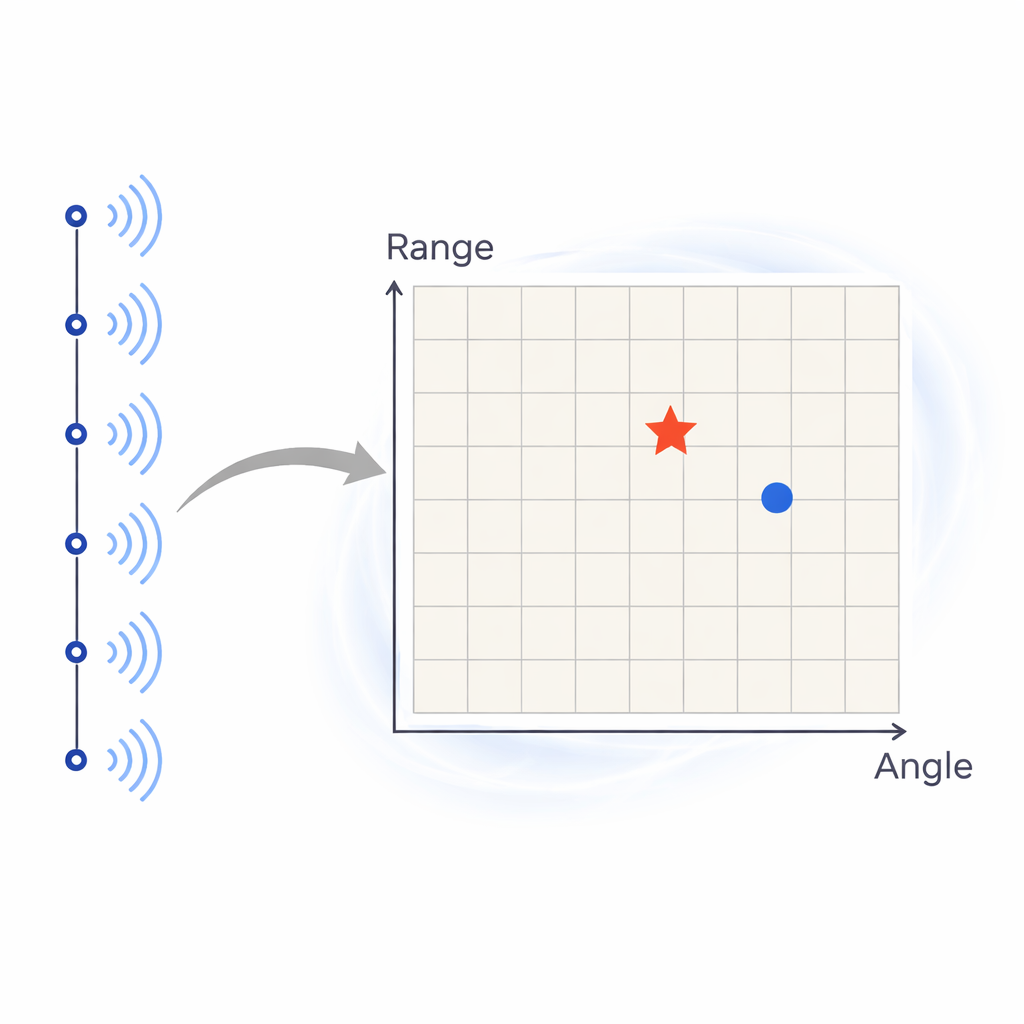
Beweging toevoegen: snelheid meten met hetzelfde idee
Om te schatten hoe snel een doel beweegt, breidt de methode het graafconcept uit naar de tijdsdimensie, over meerdere radarpulsen. Nu vertegenwoordigt elk knooppunt een puls in de tijd, en verbinden de randen aangrenzende pulsen in een lus om vast te leggen hoe het signaal zou moeten evolueren als het doel een bepaalde radiale snelheid heeft. Ook hier geldt: wanneer de veronderstelde snelheid overeenkomt met de werkelijke snelheid, toont het getransformeerde signaal een geconcentreerde piek in het spectrale domein van de graaf. Het algoritme scant kandidaat-snelheden en zoekt waar deze piek het sterkst is. Cruciaal is dat de auteurs hun raamwerk zo ontwerpen dat afstand–hoek-schattingen uit de ruimtelijke graaf en snelheidschattingen uit de temporele graaf elkaar versterken. Data van alle antennes en alle pulsen worden gecombineerd tot een multidimensionale structuur die de nauwkeurigheid verbetert zonder onnodig werk te verdubbelen. 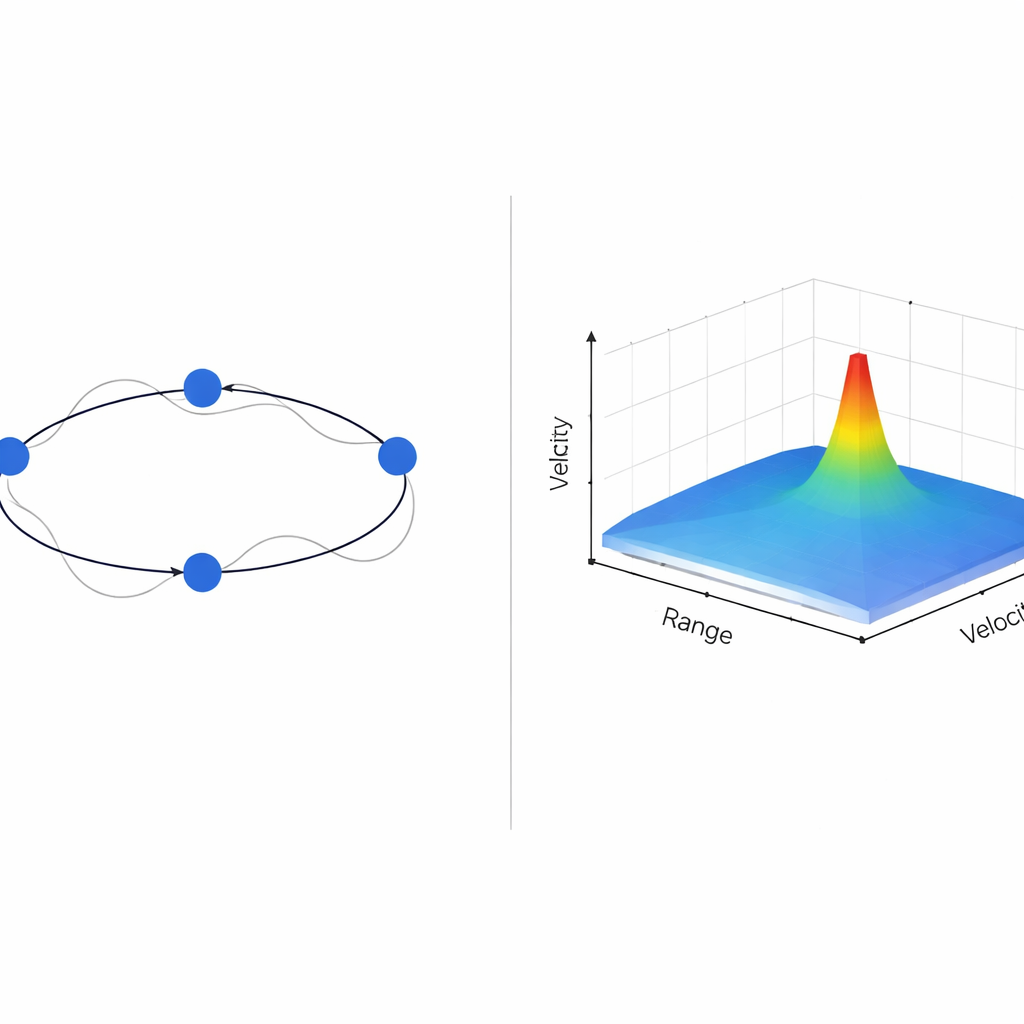
De methode op de proef stellen
Via een reeks simulaties vergelijken de onderzoekers hun graafgebaseerde aanpak met een veelgebruikte hoogprecisie-techniek genaamd MUSIC. Ze testen scenario’s met één en meerdere doelen, onderzoeken hoe goed elke methode nabijgelegen objecten kan scheiden, en bekijken prestatie wanneer signalen zeer zwak zijn ten opzichte van ruis. Het graafgebaseerde algoritme bereikt een vergelijkbare totale rekenbelasting als klassieke methoden, maar biedt scherpere resolutie in afstand, hoek en snelheid. Het is bijzonder effectief in het onderdrukken van valse pieken veroorzaakt door ruis, wat leidt tot schonere, betrouwbaardere doelkaarten. Zelfs wanneer de signaal‑tot‑ruisverhouding slecht is — condities waarbij veel traditionele methoden moeite hebben — houdt het nieuwe algoritme krappe foutmarges aan voor waar doelen zich bevinden en hoe snel ze bewegen.
Wat dit betekent voor radar in de praktijk
Simpel gezegd laat dit werk zien hoe het behandelen van radargegevens als signalen op een netwerk slimere verwerking mogelijk maakt die echte doelen beter van clutter kan scheiden. Voor toepassingen van defensie en luchtverkeersleiding tot autoveiligheid en milieumonitoring belooft de voorgestelde techniek accuratere tracking van meerdere bewegende objecten onder moeilijke omstandigheden, zonder onrealistische rekencapaciteit te vereisen. Door geavanceerd antenneontwerp te combineren met graafgebaseerde wiskunde tonen de auteurs een praktische weg naar radars die verder, scherper en betrouwbaarder zien in een steeds complexer elektromagnetisch landschap.
Bronvermelding: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Trefwoorden: radar detectie, doelvolging, signaalverwerking, graf-signaalverwerking, FDA-MIMO