Clear Sky Science · nl
Richtingbewuste en zelfadaptieve A*-algoritme met PPO-heuristiek voor UAV-padplanning in slimme steden
Slimmere routes voor stadsdrones
Stel je voor: vloten van kleine bezorgdrones die tussen wolkenkrabbers door vliegen en medicijnen, pakketten of noodvoorraden door een drukke stad bezorgen. Om veilig en snel te kunnen vliegen, moet elke drone voortdurend beslissen welke kant hij op moet. Dit artikel introduceert een nieuwe manier voor drones om betere routes te vinden in drukke driedimensionale stedelijke ruimten, waardoor hun trajecten korter, vloeiender en betrouwbaarder worden dan met traditionele methoden.

Waarom een goed pad vinden zo moeilijk is
Voor een drone is het kiezen van een pad meer dan het trekken van een rechte lijn van punt A naar punt B. Hij moet gebouwen, bomen en vliegverboden ontwijken en tegelijk rekening houden met beperkingen in draaien en hoogte. Klassieke padplanningsmethoden, zoals het bekende A*-algoritme, werken goed op eenvoudige kaarten maar hebben moeite in realistische 3D-stedelijke omgevingen. Ze controleren vaak te veel mogelijke volgende stappen, verspillen rekenkracht en kunnen zigzagroutes opleveren die langer dan nodig zijn of zelfs falen wanneer de omgeving erg vol is. Naarmate slimme steden complexer worden, vormen deze zwakke punten een serieuze bottleneck voor veilige en efficiënte luchtverkeersvoering.
Een richtingbewuste upgrade voor een klassiek hulpmiddel
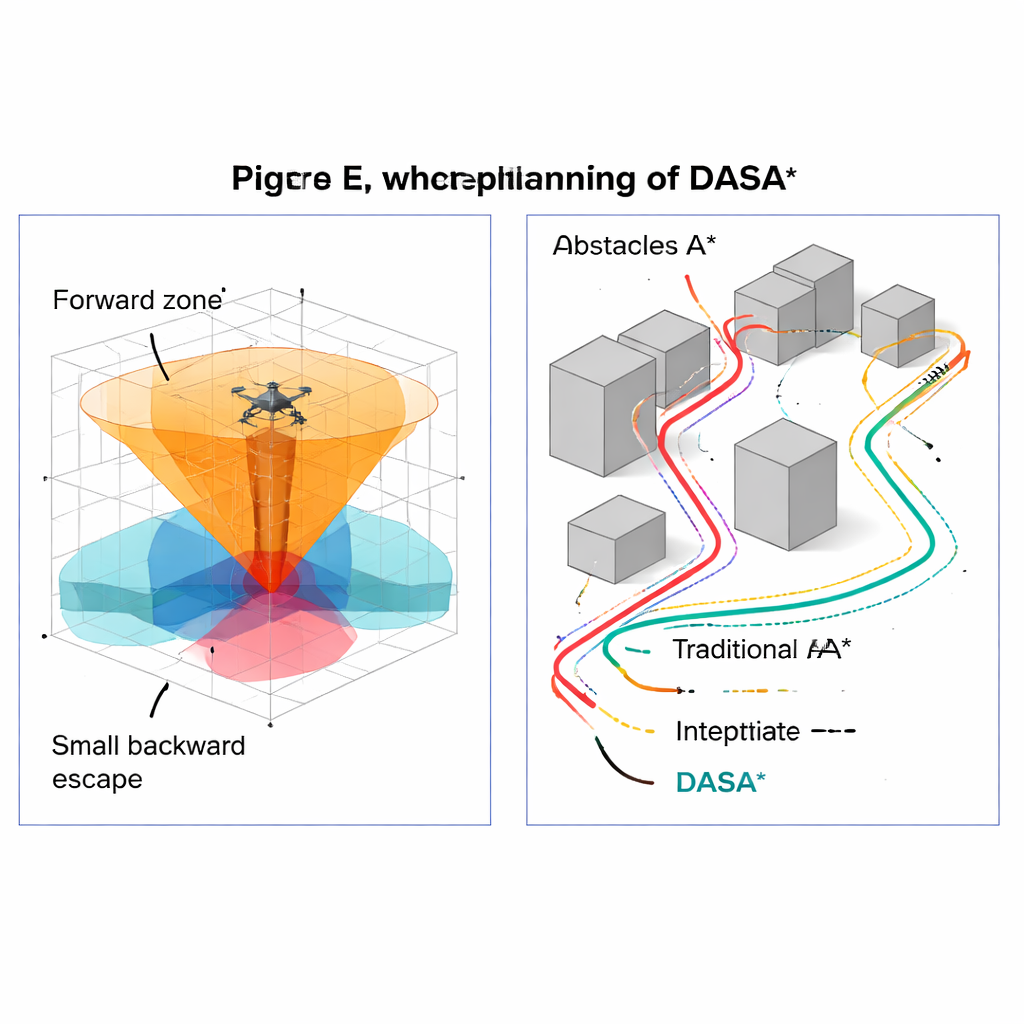
De auteurs bouwen voort op het A*-algoritme en stellen een verbeterde versie voor genaamd DASA* (Direction-Aware and Self-Adaptive A*). In plaats van willekeurig in alle richtingen rond de drone te zoeken, let DASA* op waar het doel zich bevindt. Het classificeert nabijgelegen kandidaatposities in drie lagen: die grotendeels voor de drone liggen in de richting van het doel, die aan de zijkanten en een kleine set erachter die kan helpen uit doodlopende situaties te ontsnappen. Een eenvoudige stall-detector houdt in de gaten of de zoekopdracht vastloopt en vergroot dan automatisch de zoekruimte van een smalle voorwaartse kegel naar een breder buurtgebied wanneer dat nodig is. Deze zorgvuldige, op het doel afgestemde uitbreiding vermindert nutteloze verkenning en garandeert toch dat er een geldig traject wordt gevonden als dat bestaat.
Aanpassen aan drukke en open ruimtes
Een ander belangrijk kenmerk van DASA* is dat het zijn stapgrootte aanpast aan de omgeving. Wanneer de drone ver van obstakels is, voert het algoritme grotere stappen uit en bestrijkt snel de open ruimte. Naarmate het dichter bij gebouwen of andere gevaren komt, schakelt het over op kleinere stappen, waardoor nauwkeurig manoeuvreren door nauwe doorgangen mogelijk wordt. Dit variabele "zoomniveau" laat de planner snel bewegen waar het veilig is en alleen vertragen waar nauwkeurigheid belangrijk is. Nadat een ruw pad is gevonden, verwijdert een speciale aanpassingsfase onnodige waypoints en legt een vloeiende kromme door de overgebleven sleutelpunten. Het resultaat is een route die niet alleen botsingen vermijdt maar er ook meer uitziet als een natuurlijke vliegroute die een bekwame piloot zou kiezen, met minder plotselinge bochten.
Het algoritme leren vooruit te kijken
Traditionele A* vertrouwt op eenvoudige afstandsformules om te schatten hoe ver elke positie van het doel ligt. DASA* vervangt dit giswerk door een geleerd kompas gebaseerd op Proximal Policy Optimization (PPO), een moderne reinforcement-learningtechniek. In een trainingsomgeving oefent een virtuele agent herhaaldelijk het bewegen naar een doel in 3D-ruimte terwijl hij afstanden, hoogteverschillen en richtingsinformatie waarneemt. Een neuraal netwerk leert geleidelijk hoe veelbelovend elke situatie is en dient na training als een insteek-"intuïtiemodule" voor DASA*. Deze geleerde heuristiek stuurt de zoekopdracht directer naar goede oplossingen, vooral in complexe lay-outs waar eenvoudige rechte-lijnafstanden misleidend kunnen zijn.
Hoe goed het werkt in virtuele steden
De onderzoekers testten DASA* in meerdere gesimuleerde 3D-stedenscenario's gevuld met doosvormige gebouwen en cilindrische obstakels die echte stedelijke structuren nabootsen. Ze vergeleken het met klassiek A* en verschillende populaire alternatieven, waaronder verbeterde versies van rapidly-exploring trees, particle swarms, differential evolution en een andere A*-variant genaamd Theta*. In veel testgevallen vond DASA* consequent kortere paden, breidde veel minder kandidaatpunten uit en draaide veel sneller — vaak 10 tot 50 keer sneller dan standaard A*. Het behaalde ook een perfecte of bijna perfecte succeskans, zelfs in dichtbevolkte, doolhofachtige omgevingen, terwijl sommige concurrerende methoden vaker faalden of lange, rondgaande omwegen produceerden.
Wat dit betekent voor het dagelijks leven
In eenvoudige bewoordingen geeft DASA* vliegende robots een beter gevoel voor richting en oordeel. Door zich te concentreren op veelbelovende richtingen, zijn detailniveau aan te passen aan de lokale omgeving, een geleerd gevoel te gebruiken voor hoe dicht het bij succes is, en het eindtraject te verfijnen, zet het ruwe kaartgegevens om in vliegroutes die efficiënt, vloeiend en praktisch zijn. Als dit in echte systemen wordt toegepast, kan zo’n benadering toekomstige slimme steden helpen dronebezorging, inspecties en noodreacties veiliger en betrouwbaarder te beheren, zelfs naarmate de luchten drukker worden en omgevingen complexer raken.
Bronvermelding: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Trefwoorden: UAV-padplanning, drones in slimme steden, A*-algoritme, autonome navigatie, robotbewegingsplanning