Clear Sky Science · nl
Sensorloze positioneringsbesturing op volle snelheid voor PMSM op basis van verbeterde super-twisting sliding-mode-observer en soepele overgangsoptimalisatie
Elektrische motoren slim houden zonder extra hardware
Van elektrische auto’s tot vliegtuigactuatoren: veel moderne machines gebruiken een speciaal type elektromotor, de permanent-magneet-synchrone motor (PMSM). Deze motoren zijn efficiënt en krachtig, maar vereisen doorgaans gevoelige sensoren om rotorsnelheid en -positie te volgen. Sensoren verhogen de kosten en kunnen falen in zware omgevingen. Deze studie onderzoekt hoe men deze motoren vloeiend en nauwkeurig over het volledige snelheidsbereik kan laten werken zonder mechanische sensoren.
Waarom het verwijderen van sensoren zo moeilijk is
In een typische PMSM-aandrijving zijn kleine positiemeters op de motoras gemonteerd om het regelsysteem precies te vertellen waar de rotor zich bevindt. Die informatie is cruciaal om stroom op het juiste moment in de wikkelingen te sturen, vergelijkbaar met een goed getimede duw op een ronddraaiende draaimolen. Sensoren kunnen echter kwetsbaar, omvangrijk en duur zijn. Ingenieurs proberen al lange tijd sensoren te vervangen door ‘sensorloze’ methoden die de rotorpositie afleiden uit de elektrische signalen van de motor zelf. Het probleem is dat geen enkele methode in elk toerentalbereik goed werkt. Bij lage snelheid zijn de gebruikelijke elektrische aanwijzingen zwak, terwijl bij hoge snelheid eenvoudige trucs luidruchtig en onnauwkeurig worden. Die kloof dichten zonder schokken, trillingen of verlies van controle blijft een hardnekkige uitdaging.
Twee slimme manieren om naar de motor te luisteren
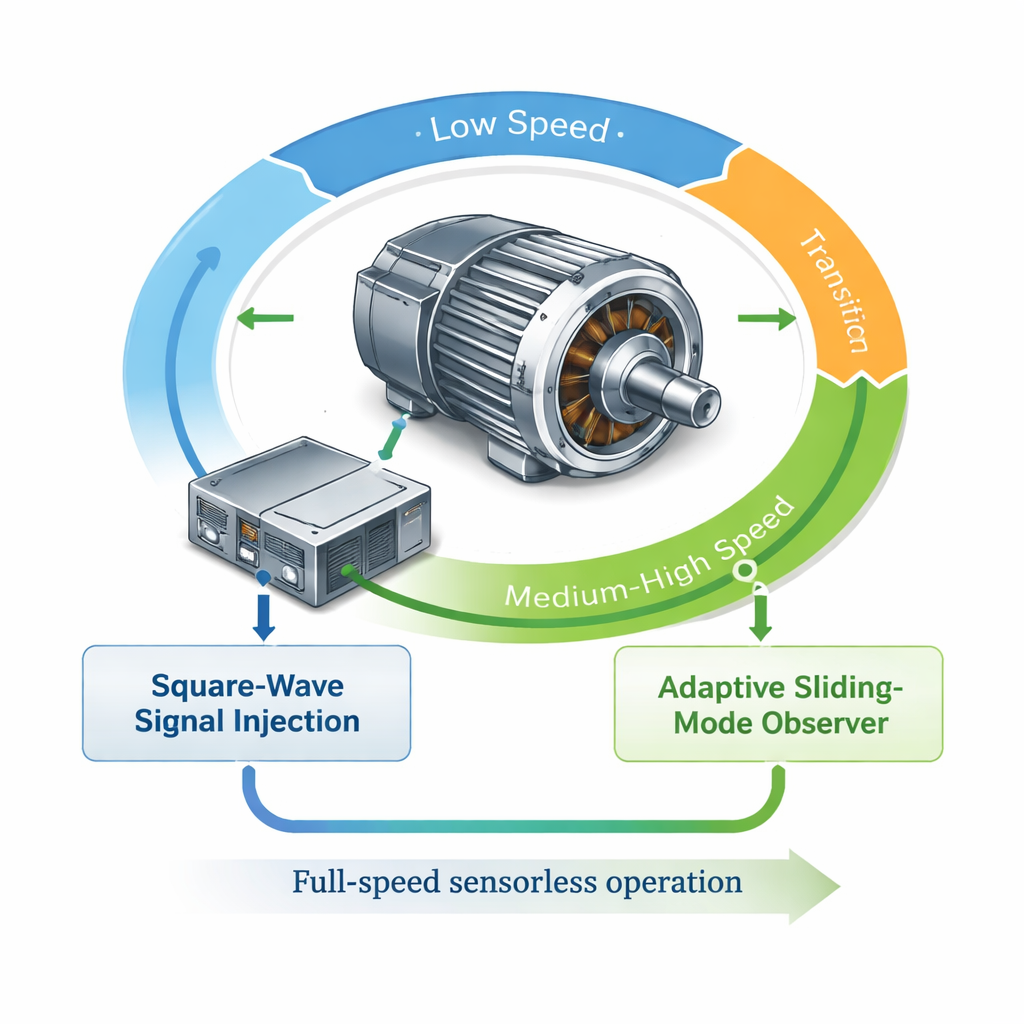
Om het volledige snelheidsbereik te dekken, combineren de auteurs twee aanvullende sensorloze technieken. Bij lage snelheden, waar de natuurlijke elektrische terugkoppeling van de motor te klein is om betrouwbaar te meten, injecteren ze opzettelijk een snel vierkantspanningssignaal in de wikkelingen. De motor reageert verschillend afhankelijk van de rotortoestand, dus door de resulterende hoogfrequente stroom te analyseren kan de regelaar de rotorpositie afleiden. Deze ‘hoogfrequente injectie’-benadering werkt als het uitzenden van een zachte sondesignaal en het lezen van de echo. Bij middelmatige en hoge snelheden produceert de motor sterkere natuurlijke terugkoppeling, bekend als tegen-EMK. Hiervoor gebruikt het team een geavanceerde wiskundige observer die het gedrag van de motor volgt en rotorpositie en -snelheid schat op basis van gemeten spanningen en stromen.
De digitale observer slimmer en rustiger maken
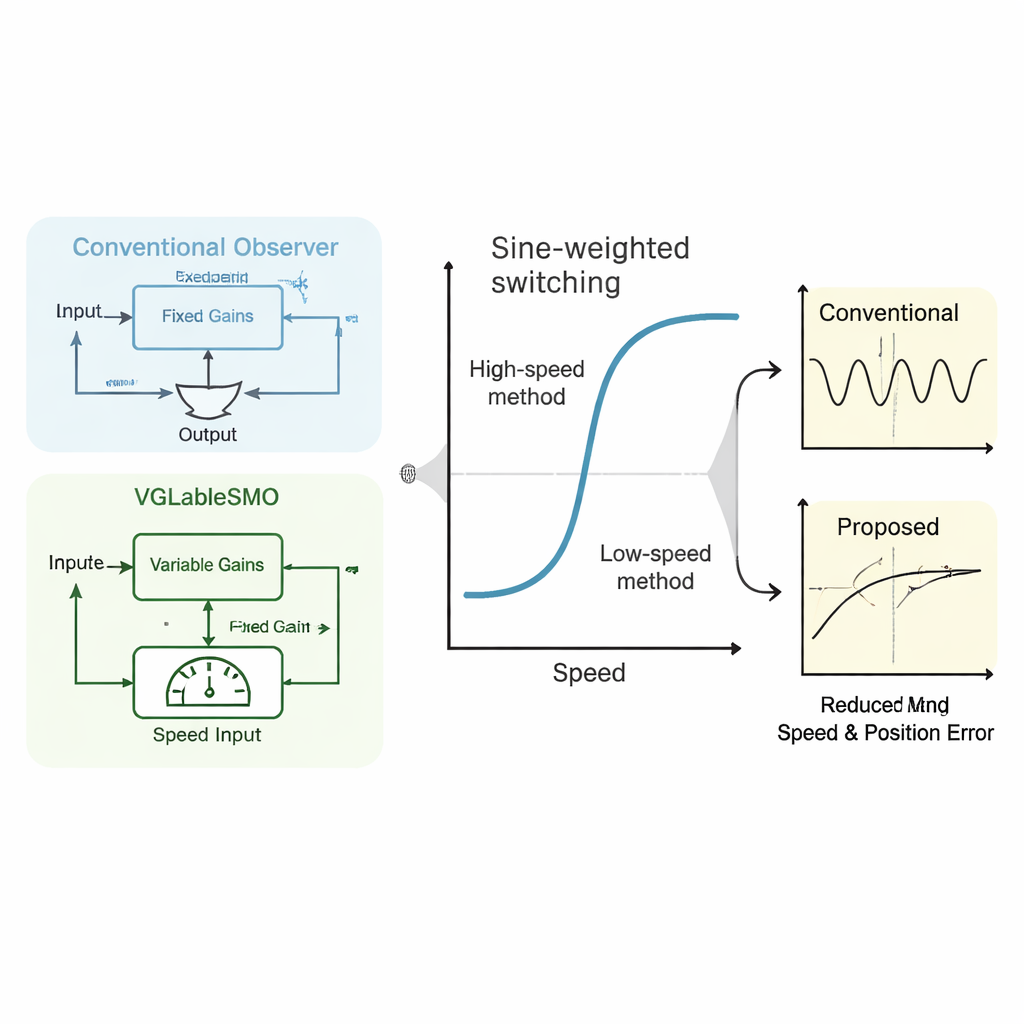
De kerninnovatie aan de hoge-snelheidszijde is een verbeterde observer die een variable-gain linear super-twisting sliding-mode observer (VGLSTSMO) wordt genoemd. Traditionele sliding-mode-observers staan bekend om hun robuustheid tegen ruis en storingen, maar lijden vaak aan ‘chattering’, kleine maar snelle oscillaties die zich kunnen vertalen naar koppel- en snelheidsruis. Ze vertrouwen ook op vaste interne instellingen die in de ene bedrijfsconditie goed presteren maar in een andere slecht. De voorgestelde observer past zijn interne versterkingen automatisch aan naarmate de motorsnelheid verandert en voegt een correctieterm toe die de schattingen geleidelijk naar de werkelijke waarden trekt. Een adaptief mechanisme verfijnt bovendien de inschatting van de interne motorspanning, wat de nauwkeurigheid van zowel snelheid als positie verbetert. Computersimulaties tonen dat deze slimmere observer de positieafwijking bij midden–hoge snelheden vermindert van ongeveer 0,9 radiaal naar circa 0,2 radiaal en de tijd verkort die het systeem nodig heeft om na een belastingverandering te stabiliseren.
De overdracht tussen laag en hoog toerental versoepelen
Het toepassen van twee verschillende schattingsmethoden brengt een nieuw probleem met zich mee: hoe schakel je vloeiend tussen beide wanneer de motor accelereert. Een eenvoudige aanpak is het uitfaden van de ene methode en infaden van de andere met een rechte-lijn weging, maar dat kan nog steeds stoten in koppel en snelheid veroorzaken. De auteurs stellen een zachtere, sinusvormige weegfunctie voor. Binnen een gekozen overgangsband verschuift het regelsysteem geleidelijk het vertrouwen van de laag-snelheidsmethode naar de hoog-snelheidsobserver volgens een vloeiende golfachtige curve in plaats van een scherpe helling. Deze verfijnde menging vermindert zichtbaar snelheidsstoten en hoekfouten tijdens de wissel, verkleint de transiënte hoekfout en halveert de tijd die nodig is om te stabiliseren.
Wat dit betekent voor machines in de praktijk
Samenvattend levert de gecombineerde strategie — de motor sondes laten uitvoeren bij lage snelheid, een adaptieve observer bij hogere snelheden gebruiken en tussen beide schakelen met een soepele sinusweging — stabiele en nauwkeurige besturing over het volledige snelheidsbereik zonder mechanische sensoren. In simulaties houdt de voorgestelde methode snelheidsovershoot en stationaire fouten klein en voorkomt zij de harde chattering die lawaai, slijtage en ongemak kan veroorzaken. Voor alledaagse toepassingen betekent dit dat elektrische voertuigen, industriële aandrijvingen en voortstuwingssystemen betrouwbaarder, compacter en goedkoper kunnen worden gebouwd, terwijl ze toch precieze bewegingsbesturing behouden zonder afhankelijk te zijn van kwetsbare asgemonteerde sensoren.
Bronvermelding: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Trefwoorden: sensorloze motorbesturing, permanent-magneet-synchrone motor, sliding-mode observer, hoogfrequente signaalinjectie, elektrische aandrijfsystemen