Clear Sky Science · nl
Invloed van structurele parameters op het werkbereik van delta-parallelrobots en optimalisatie van padadaptatie voor het sorteren van verse thee bladeren
Robots betreden de theefabriek
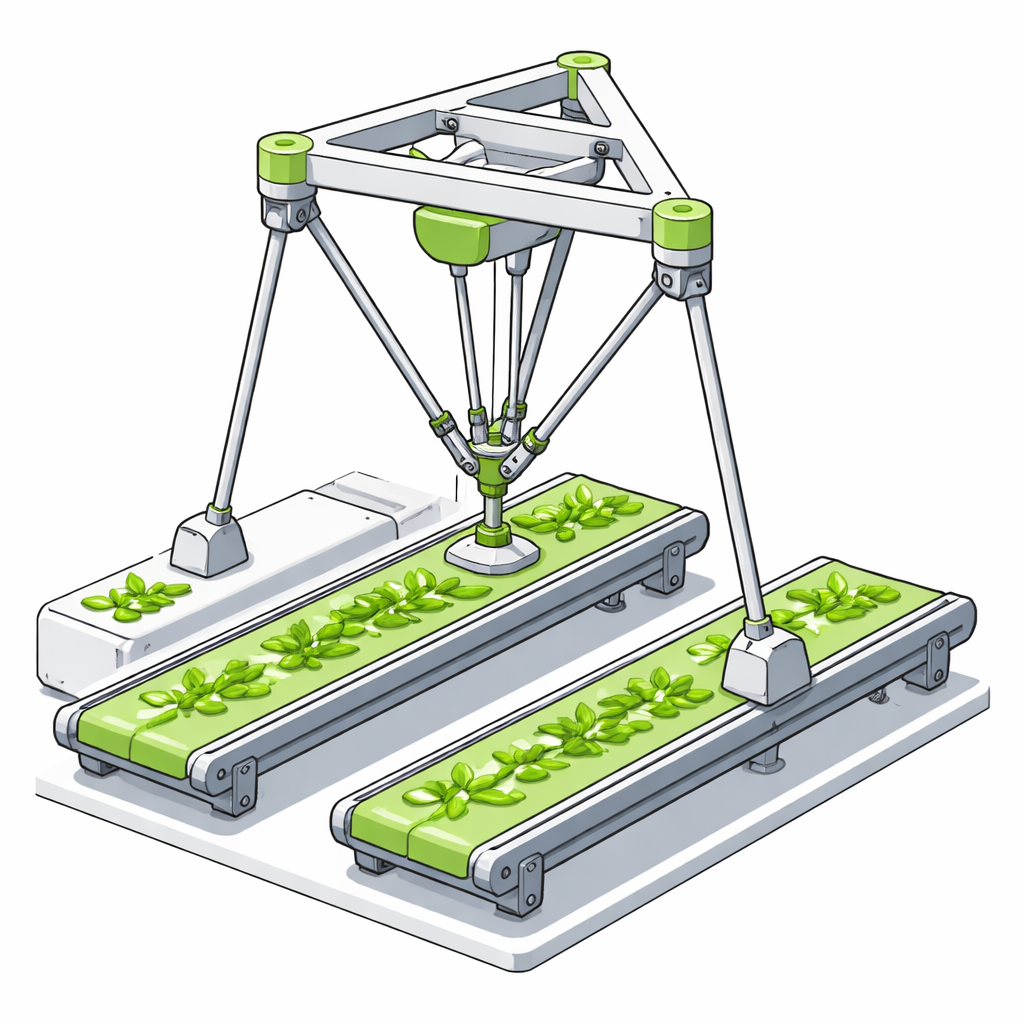
Verse theebladeren zijn kwetsbaar: een knop pletten of een blad kneuzen doet afbreuk aan het eindproduct. Toch is handmatig sorteren vermoeiend en traag. Dit artikel onderzoekt hoe een snelle, lichtgewicht industriële robot — een delta-robot — kan worden afgestemd zodat hij snel en nauwkeurig over theetransportbanden beweegt en tegelijkertijd de bladeren voorzichtig en betrouwbaar hanteert.
Waarom theebladeren speciale behandeling nodig hebben
In moderne theeverwerking is het sorteren van verse bladeren cruciaal voor kwaliteit en prijs. Menselijke medewerkers hebben moeite het tempo en de consistentie bij te houden, zeker tijdens lange diensten. Delta-robots, veelgebruikt voor hoogsnelheidsverpakkingen, lijken een natuurlijke keuze: ze zijn stijf, nauwkeurig en kunnen indrukwekkende snelheden bereiken. De meeste bestaande ontwerpen waren echter bedoeld voor generieke voorwerpen zoals dozen of noten, niet voor kwetsbare theebladscheuten die zich in een smalle zone tussen twee transportbanden bevinden. Het ‘werkbereik’ van de robot — het driedimensionale gebied dat hij kan bereiken — moet overeenkomen met dit nauwe gebied en een specifieke poortvormige beweging volgen: grijpen, optillen, overzetten en plaatsen, zonder zichzelf te raken of doelwitten te missen.
Hoe de vorm van de robot bepaalt waar hij bij kan
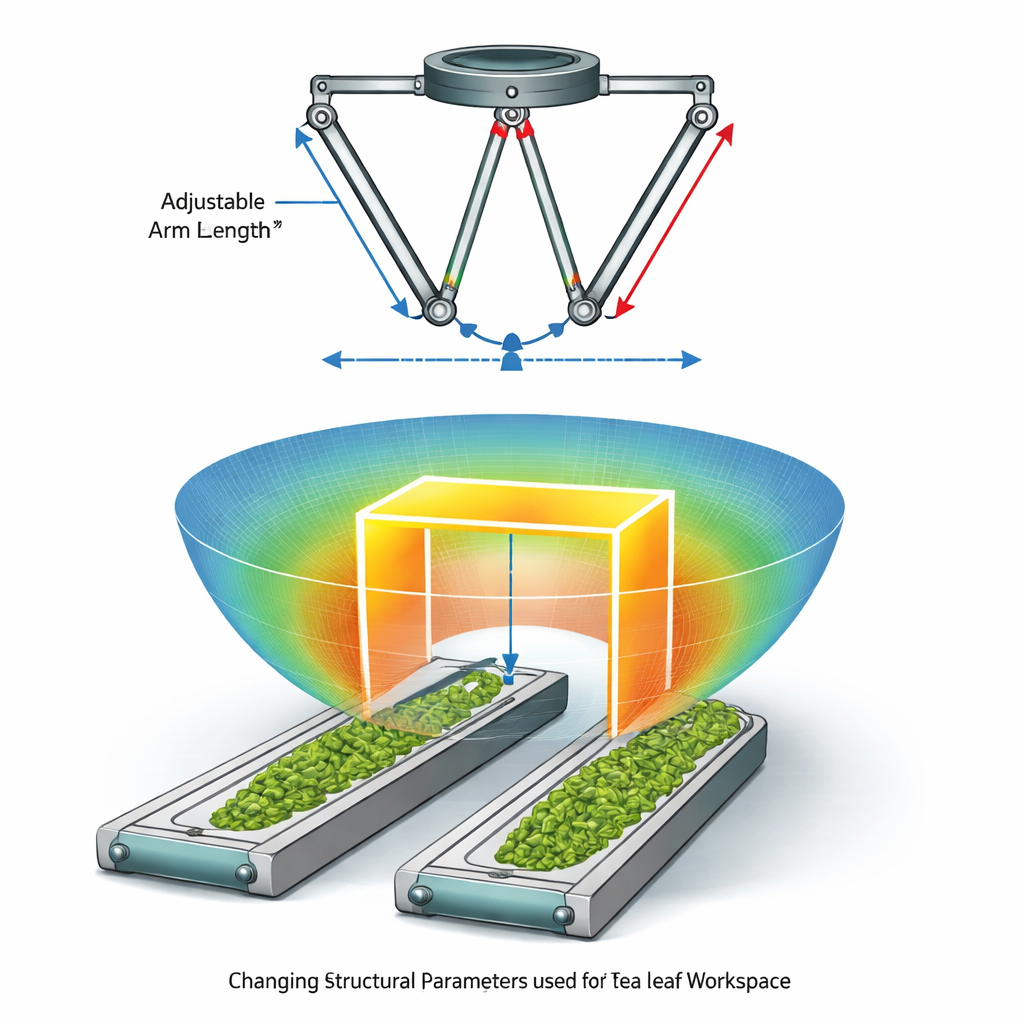
De auteurs beginnen met een gedetailleerde wiskundige beschrijving van de beweging van de delta-robot. Ze koppelen de hoeken van de drie aandrijvende gewrichten aan de precieze positie van het kleine bewegende platform dat een zuignap draagt. Met zowel voorwaartse (hoeken naar positie) als inverse (positie naar hoeken) berekeningen definiëren ze elk punt dat het eind-effecter fysiek kan bereiken wanneer de gewrichtshoeken binnen een veilige range blijven. Met deze vergelijkingen gecodeerd in MATLAB simuleren ze het volledige bereikbare volume van de robot en tonen dit vanuit meerdere gezichtspunten als een kleurrijke, komvormige puntwolk. Dit werkbereik vormt vervolgens de basis om te beoordelen of een bepaald mechanisch ontwerp het theesorteerpad kan afdekken.
Vele ontwerpen testen met virtuele experimenten
In plaats van meerdere fysieke prototypes te bouwen, behandelen de onderzoekers vier sleutelkeuzes in de geometrie als instelknoppen: de lengte van de bovenarmen (L), de lengte van de onderarmen (l), de straal van de vaste basistriangle (R) en de straal van de bewegende triangle (r). Ze gebruiken een orthogonaal experimenteel ontwerp, dat efficiënt combinaties van deze vier parameters op drie niveaus bemonstert, resulterend in negen virtuele robots. Voor elk exemplaar berekent het programma het totale werkbereikvolume en laat zien hoe dat overlapt met een gestandaardiseerde poortvormige padbox van 200 mm hoog, 400 mm breed en 200 mm diep. Dit maakt het mogelijk niet alleen te zien hoe groot elk werkbereik is, maar ook of het daadwerkelijk het gebied afdekt waar theebladeren op de banden bewegen.
Welke afmetingen het meest belangrijk zijn
Door de negen gesimuleerde ontwerpen te vergelijken, rangschikt de studie hoe sterk elke structurele keuze het bruikbare bereik beïnvloedt. De duidelijke winnaar is de passieve (onder)armlengte: langere onderarmen vergroten het werkbereik sterk. Daarna volgt de actieve (boven)armlengte, die de bewegingsruimte ook uitbreidt maar vibratie kan introduceren als hij te lang wordt. De basiswaarde heeft een matig effect; als de basis te breed is, raken de bewegende armen gemakkelijker het frame, waardoor het werkelijk bruikbare volume krimpt. De straal van het bewegende platform heeft het zwakste effect, maar een kleiner platform helpt nog iets door ruimte vrij te maken voor armbeweging. Range- en variantieanalyses tonen aan dat terwijl sommige parametersets het grootste totale werkbereik geven, ze niet per se de smalle, poortvormige regio afdekken die belangrijk is voor theesortering.
Een ontwerp dat bij de theelijn past
De meest praktische configuratie blijkt niet die met het grootste volume in totaal, maar die waarvan het werkbereik netjes om de poortvormige traject past. Eén specifieke combinatie — 250 mm bovenarmen, 400 mm onderarmen, een basiskrachtstraal van 90 mm en een straal van 50 mm voor het bewegende platform — dekt het vereiste pad tussen de twee transportbanden volledig af en houdt de robot compact en stabiel. Op een bedrijfshoogte rond 325 mm boven het referentievlak bereikt de robot zijn breedste bruikbare bereik, ruim voldoende om beide banden te overspannen en de grijpend–optillen–verplaatsen–plaatsen cyclus te voltooien zonder het veilige gebied te verlaten.
Wat dit betekent voor toekomstige theefabrieken
Voor niet-specialisten is de kernboodschap dat kleine veranderingen in de lengte van robotarmen en platformmaten het verschil kunnen maken tussen een machine die alleen indrukwekkend beweegt in open ruimte en een die betrouwbaar werkt op een echte productielijn. Door kwantitatief vast te leggen hoe elke structurele parameter het bereikbare volume en de overlap met een realistisch poortvormig pad vormt, biedt deze studie een recept voor het ontwerpen van delta-robots die theebladeren snel, nauwkeurig en met minimale beschadiging sorteren. Dezelfde aanpak kan maatwerkrobots sturen voor andere voedingswaren of kwetsbare producten waar snelheid, precisie en zacht hanteren tegelijk vereist zijn.
Bronvermelding: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Trefwoorden: delta-robot, theebladsortering, robotwerkbereik, pick-and-place, industriële automatisering