Clear Sky Science · nl
Ontwikkeling en evaluatie van een oppervlakgestuurd patiëntpositioneringssysteem voor boron neutron capture therapy
Nauwkeuriger richten voor kankervretende neutronen
Boron Neutron Capture Therapy (BNCT) is een veelbelovende kankerbehandeling die tumorcellen selectief kan beschadigen terwijl veel van het omliggende gezonde weefsel gespaard blijft. Maar om van die precisie te profiteren, moeten artsen een patiënt precies op de juiste plek plaatsen voor een vaste neutronenbundel—vaak met een nauwkeurigheid van een millimeter. Dit artikel beschrijft een nieuw camera‑ en robotgestuurd positioneringssysteem dat is ontworpen om die delicaat opstelling sneller, nauwkeuriger en minder afhankelijk van de handvaardigheid en het oordeel van een technicus te maken.
Waarom positionering zo belangrijk is
In tegenstelling tot veel moderne röntgenapparaten die om de patiënt heen kunnen bewegen en hun bundels kunnen vormen, is BNCT afhankelijk van een zware, vaste neutronenbron met beperkte mogelijkheden om de bundel te sturen. De patiënt, niet de bundel, moet dus in precies de juiste positie worden gebracht. Traditioneel gebruiken medewerkers lasers, huidmarkeringen en handmatige verschuivingen van de behandelbank om dit te doen. Dat proces is traag, sterk afhankelijk van de vaardigheid van de operator en kan kleine positiefouten opleveren die veranderen hoeveel dosis een tumor—en nabijgelegen organen—daadwerkelijk ontvangen. Naarmate BNCT‑centra opengaan voor de behandeling van complexere tumoren in hoofd, hals en andere moeilijk bereikbare gebieden, worden deze beperkingen een serieus probleem.
Een hightech hulp: camera’s, software en een robot
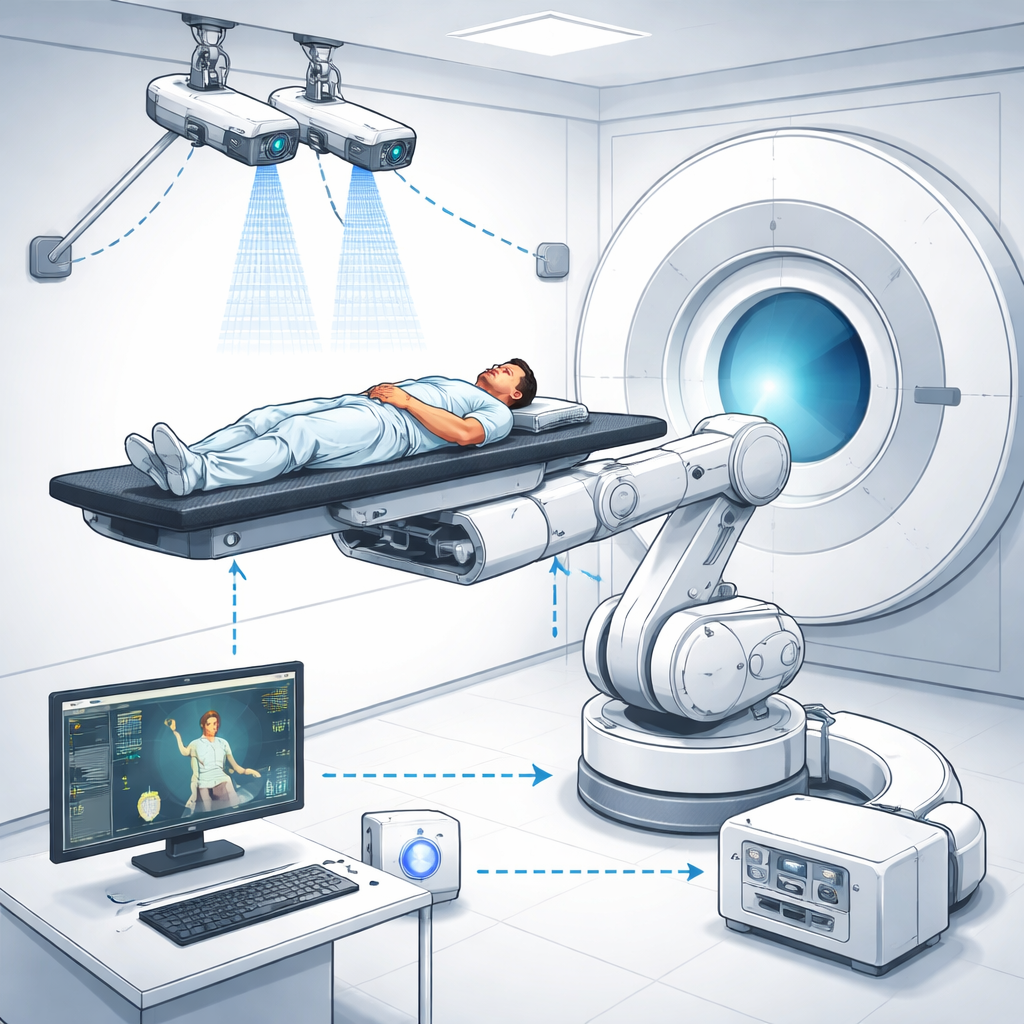
Om dit probleem aan te pakken bouwde het onderzoeksteam een geïntegreerd Surface‑Guided BNCT (SG‑BNCT) systeem dat drie hoofdcomponenten combineert: een gespecialiseerd behandelplanningssysteem genaamd NeuMANTA, een binoculair stereo‑visie camerasysteem en een zesassige industriële robot die het behandelbed draagt. In NeuMANTA plannen artsen de BNCT‑behandeling op CT‑beelden, inclusief het exacte punt waar de neutronenbundel moet passeren en drie kleine referentiepunten, of fiducial markers, op de huid van de patiënt. Deze markers definiëren de positie van de patiënt in de planningsbeelden en koppelen dat plan aan de coördinaten in de behandelruimte via wiskundige transformatie‑matrices.
Hoe 3D‑camera’s de opstelling zien en corrigeren
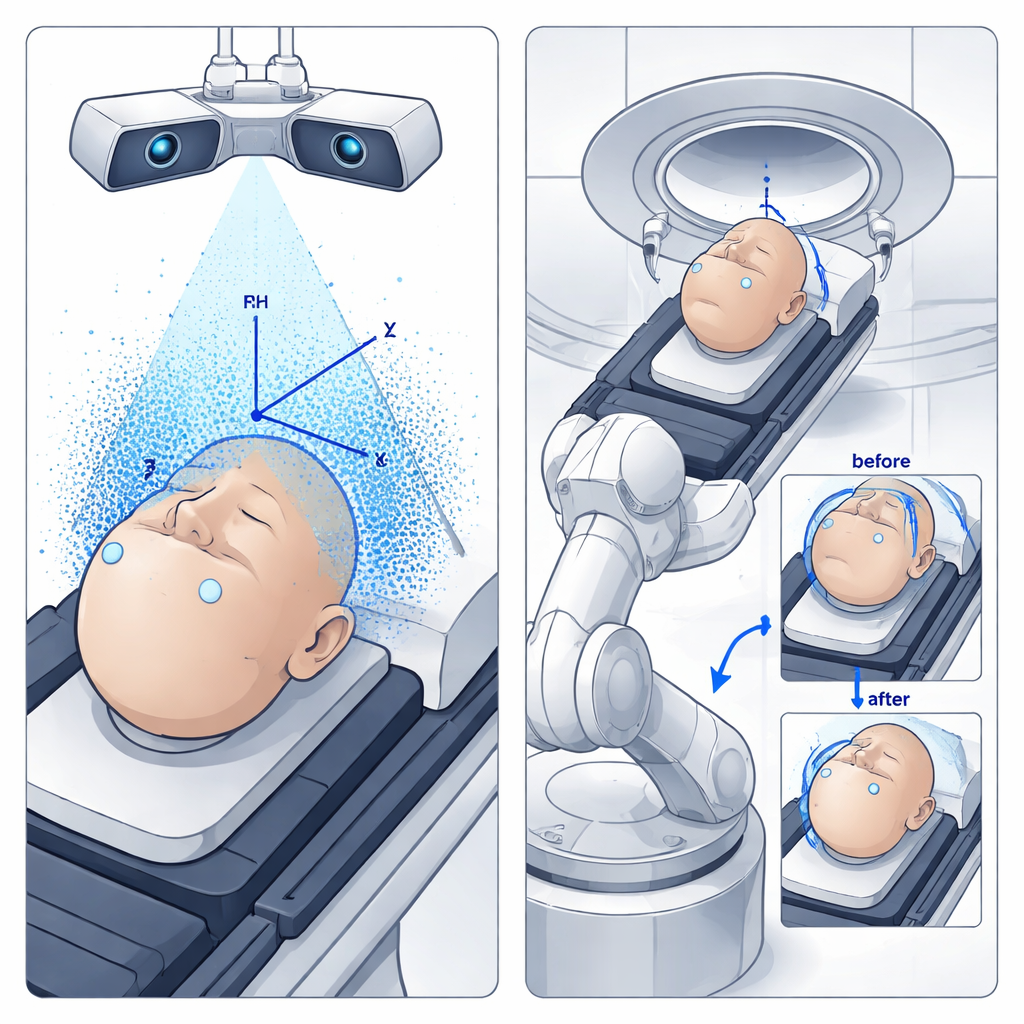
In de behandelruimte houden twee hoogresolutiecamera’s de patiënt vanuit verschillende hoeken in de gaten, vergelijkbaar met hoe menselijke ogen werken. Met een modern objectdetectiealgoritme (YOLO), getraind op meer dan duizend afbeeldingen, vindt het systeem snel dezelfde fiducial markers op het oppervlak van de patiënt. Door te vergelijken hoe elke marker in de linker en rechter camerabeelden verschijnt, reconstrueert de computer hun 3D‑posities en maakt een gedetailleerde puntenwolk van het oppervlak. Vanuit drie niet‑kollineaire markers bouwt het systeem een patiëntcoördinatensysteem op en vergelijkt dit met het coördinatensysteem dat in het behandelplan is gedefinieerd. Elke mismatch tussen geplande en werkelijke posities wordt omgezet in translatie‑ en rotatiecommando’s—zes vrijheidsgraden in totaal—voor de industriële robot die het patiëntbed draagt.
Testen met een plaatsvervangende patiënt
Voordat het systeem op echte patiënten werd toegepast, testte het team het met een antropomorfe phantom—een mensachtig model—uitgerust met interne en oppervlaktemarkeringen die zowel in CT‑scans als door de camera’s zichtbaar waren. Ze creëerden meerdere behandelopstellingen in NeuMANTA met verschillende bundelrichtingen en vroegen vervolgens het SG‑BNCT‑systeem om deze plannen te reproduceren door de phantom automatisch in positie te brengen. Een laser geplaatst in het centrum van de neutronenbundelopening fungeerde als plaatsvervanger voor de werkelijke bundel, zodat de onderzoekers direct konden meten hoe ver het uiteindelijke punt op de phantom afweek van het beoogde doel, zowel langs de bundelas (bron‑tot‑huidafstand) als zijwaarts in het vlak loodrecht op de bundel.
Hoe dicht kwam het systeem in de buurt?
Over 24 experimentele opstellingen waren de positioneringsfouten van het systeem doorgaans minder dan 1 millimeter in beide richtingen, waarbij de slechtste fouten in één enkele pass ongeveer 2 tot 3 millimeter langs de bundelas bereikten. De auteurs herleidden deze resterende afwijkingen tot drie hoofdbronnen: de dikte van de CT‑beeldlagen, kleine kalibratieonzekerheden in de stereo‑camera’s en geringe pixelniveau‑onnauwkeurigheden bij het detecteren van de markers door de software. Belangrijk is dat het systeem is ontworpen om in een gesloten lus te werken: het meet herhaaldelijk de markerposities opnieuw, werkt de 3D‑uitlijning bij en geeft extra fijnbewegingsopdrachten aan de robot totdat de resterende fout onder een vooraf ingestelde drempel valt. In deze iteratieve tests daalden de uiteindelijke afwijkingen consequent tot ver onder 1 millimeter, waarmee submillimeteruitlijning in zowel diepte als zijwaartse richting werd bereikt.
Wat dit voor patiënten betekent
Voor patiënten die mogelijk baat hebben bij BNCT—vooral degenen met tumoren in complexe of gevoelige gebieden—belooft dit oppervlakgestuurde, robotgeassisteerde positioneringssysteem betrouwbaardere en efficiëntere behandelingen. Door de behandelplanningssoftware direct te koppelen aan camera’s die de werkelijke patiënt zien en aan een robot die nauwkeurige bewegingen kan uitvoeren, vermindert de methode de afhankelijkheid van handmatige laseraanpassing en menselijk gokken. Hoewel de huidige versie te traag is voor echte realtime bewegingsopvolging en tot nu toe alleen statische tests zijn uitgevoerd, tonen de resultaten aan dat de technologie routinematig een patiënt met submillimeternauwkeurigheid kan positioneren. Met verdere snelheidsverbeteringen en verharding van de hardware tegen straling zou deze aanpak een praktische ruggengraat kunnen worden voor veiligere, consistentere BNCT‑behandelingen in de kliniek.
Bronvermelding: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Trefwoorden: boron neutron capture therapy, patiëntpositionering, stereo‑visie, medische robotica, oppervlaktegeleiding