Clear Sky Science · nl
Toepassing van een temporeel convolutioneel netwerkalgoritme gecombineerd met een kanaalaandachtsmodule voor UWB-binnenlocatiebepaling
Waarom mensen binnenshuis vinden zo moeilijk is
Smartphones, robots en magazijnrobots moeten exact weten waar ze zich bevinden, zelfs wanneer GPS‑satellieten hen binnen gebouwen niet bereiken. Ultra‑wideband (UWB) radio is een sterke kandidaat voor deze taak omdat het afstanden met centimeterprecisie kan meten. Toch kaatsen, buigen of worden die radiosignalen in drukke, real‑world ruimtes vol muren, glas en bewegende mensen vaak tijdelijk geblokkeerd, wat plotselinge sprongen in de gerapporteerde positie veroorzaakt. Dit artikel onderzoekt een nieuwe op kunstmatige intelligentie gebaseerde methode die UWB‑positionering veel nauwkeuriger en stabieler maakt in zulke rommelige binnenomgevingen.
Radiopulsen in een drukke ruimte
UWB‑systemen lokaliseren een apparaat, een zogenaamde tag, door te meten hoe lang extreem korte radiopulsen erover doen om tussen de tag en meerdere vaste basisstations te reizen. In eenvoudige, open ruimtes werkt deze “time of arrival”-benadering goed. Maar binnenshuis volgen signalen vaak indirecte paden—zij kaatsen van deuren, ramen en mensen—voordat ze een ontvanger bereiken. Deze niet‑line‑of‑sight‑paden, of NLOS, laten de tag verder lijken dan hij in werkelijkheid is. Traditionele oplossingen vertrouwen op zorgvuldig opgestelde wiskundige filters of op machine‑learning tools die eerst proberen elk signaal als schoon of vervormd te labelen. Hoewel nuttig, zijn deze methoden sterk afhankelijk van deskundige afstemming of hebben ze nog steeds moeite wanneer mensen zich onvoorspelbaar door de ruimte bewegen.
De data de tijd laten vertellen
De onderzoekers stellen een andere strategie voor: in plaats van elke afstandsmeting geïsoleerd te behandelen, kijken ze naar hoe de metingen in de loop van de tijd veranderen en laten ze een diep‑leer model de patronen leren. Hun kerninstrument is een temporeel convolutioneel netwerk (TCN), een soort neuraal netwerk dat is ontworpen voor tijdbreeksgegevens. In tegenstelling tot recurrente netwerken die het ene moment na het andere verwerken, gebruiken TCN’s eendimensionale convoluties die in parallel lange reeksen geschiedenis kunnen onderzoeken. Dit ontwerp voorkomt veelvoorkomende trainingsproblemen en stelt het model in staat subtiele, langetermijntrends te herkennen—zoals hoe een persoon die tussen de tag en een basisstation doorloopt tijdelijk de gemeten afstand verlengt en die daarna weer laat terugschieten.
Het netwerk leren waar het op moet letten
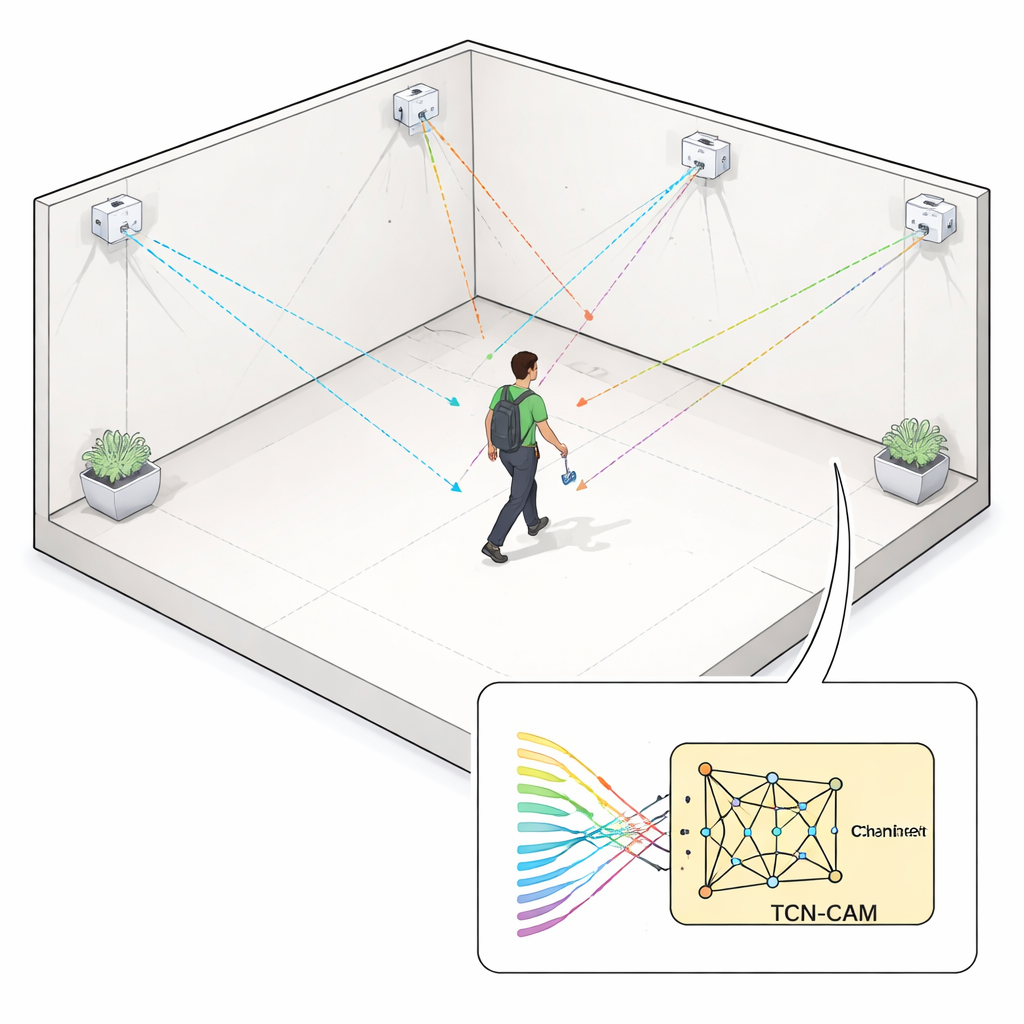
Bovenop de TCN voegt het team een kanaalaandachtsmodule (CAM) toe. Elk basisstation levert zijn eigen stroom van afstandsmetingen, en niet allemaal zijn even betrouwbaar op elk moment. CAM leert verschillende gewichten aan deze stromen toe te kennen, waardoor die worden versterkt die consistent lijken en die worden onderdrukt die vervormd zijn door reflecties of blokkades. Samen neemt het gecombineerde TCN‑CAM‑netwerk rauwe, ruisige afstanden van zes basisstations en geeft het de beste schatting van de driedimensionale coördinaten van de tag, alles in één end‑to‑end stap zonder een aparte signaalclassificatiefase.
Testen in gesimuleerde ruis en echte gangen
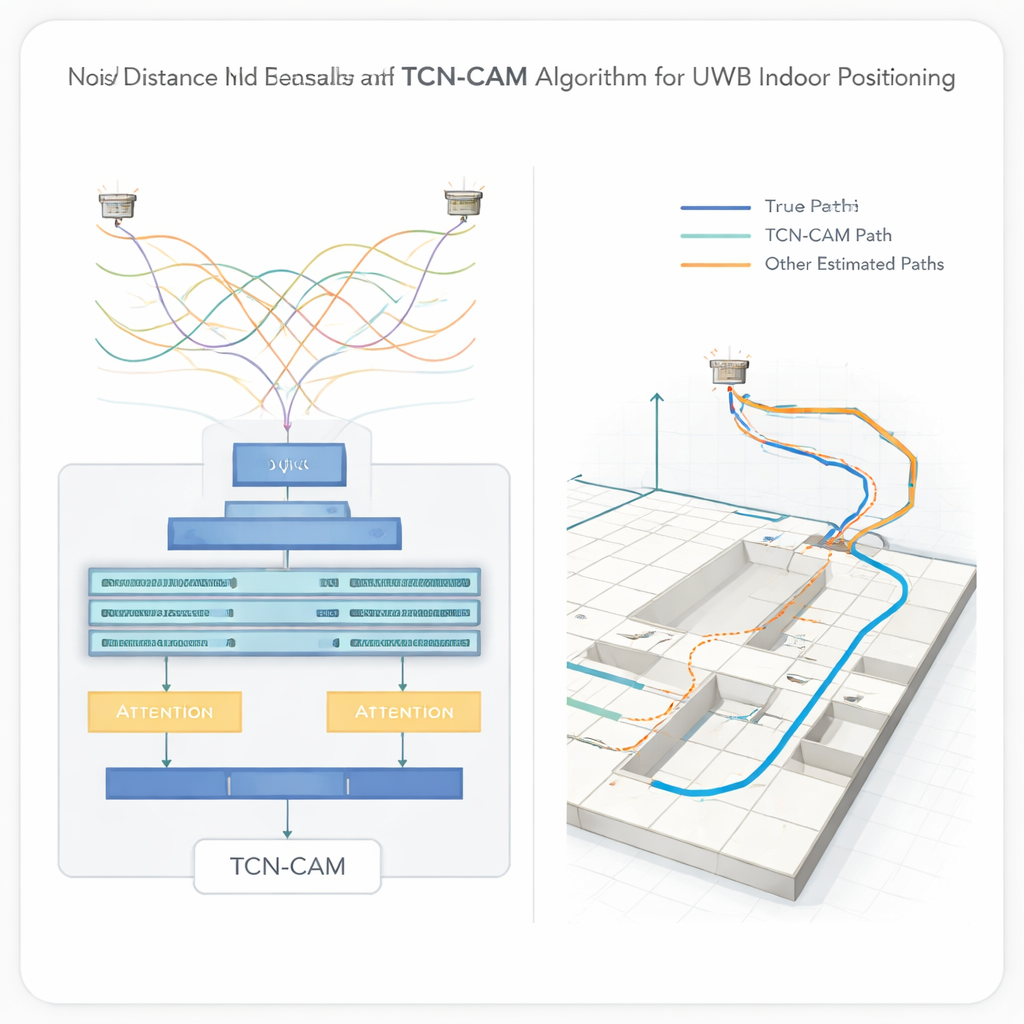
Om te zien hoe goed de methode werkt, creëerden de auteurs eerst duizenden virtuele binnenposities en simuleerden UWB‑metingen met uiteenlopende niveaus van toegevoegde ruis en NLOS‑fouten. Ze vergeleken hun TCN‑CAM‑benadering met drie concurrenten: een long short‑term memory‑netwerk met attention, een standaard TCN en een convolutioneel netwerk met kanaalaandacht. Naarmate de gesimuleerde interferentie sterker werd, namen de fouten voor alle methoden toe, maar TCN‑CAM produceerde consequent de kleinste fouten en de kleinste spreiding in resultaten, wat zowel hogere nauwkeurigheid als grotere betrouwbaarheid aangeeft. In de zwaarste testomstandigheden verminderde het de gemiddelde positiefouten ruwweg met een kwart tot de helft vergeleken met de andere methoden.
Van laboratorium naar beweging in de echte wereld
Het team ging vervolgens naar een echte binnentestlocatie met zes UWB‑basisstations, een hoogprecisie landmeetkundig instrument en mensen die rondlopen om opzettelijk signaalblokkades te veroorzaken. Het nieuwe algoritme lokaliseerde de bewegende tag met een gemiddelde fout van slechts 3,32 centimeter. Dat was ongeveer 19% beter dan een eenvoudige TCN, 25% beter dan het convolution‑plus‑attention‑model en een indrukwekkende 76% beter dan de LSTM‑gebaseerde aanpak. De TCN‑CAM‑resultaten groeperen zich niet alleen dichter rond het werkelijke pad, ze volgen ook de feitelijke driedimensionale trajecten van de tag getrouwer in alle richtingen.
Wat dit betekent voor alledaagse technologie
Voor niet‑specialisten is de kernboodschap eenvoudig: door een slim model te laten observeren hoe UWB‑afstandmetingen in de tijd veranderen en te leren welke signalen op elk moment te vertrouwen zijn, kan binnenlocatiebepaling veel preciezer en minder schokkerig worden, zelfs wanneer mensen rondlopen en het radiopad blokkeren. Hoewel de methode opnieuw getraind moet worden als de vaste basisstations worden verplaatst, biedt het een krachtige en praktische oplossing voor fabrieken, ziekenhuizen, magazijnen en slimme gebouwen waar de infrastructuur op zijn plaats blijft. Naarmate vergelijkbare diepe‑leer technieken rijpen en UWB met andere sensoren beginnen te fuseren, kunnen binnenapparaten allerhande binnenkort hun locatie bijna net zo betrouwbaar weten als uw telefoon buiten.
Bronvermelding: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Trefwoorden: binnenlocatiebepaling, ultrabreedband, diepe leren, tijdbreeksanalyse, locatievolging