Clear Sky Science · nl
Dynamische wereldwijde tracker voor online multi-camera multi-voertuig tracking
Waarom slim geplaatste verkeerscamera’s ertoe doen
Iemand die ooit vast heeft gestaan in een file of zich zorgen heeft gemaakt over verkeersongevallen, kent de beperkingen van de huidige verkeerssystemen. Moderne steden plaatsen netwerken van camera’s langs snelwegen en bij kruisingen om het verkeer in realtime te volgen. Het is echter verrassend moeilijk om deze camera’s met elkaar te laten samenwerken—om dezelfde auto soepel van de ene camera naar de andere te volgen. Deze studie introduceert een nieuwe methode om voertuigen simultaan over veel camera’s te traceren, met beloftes voor snellere, betrouwbaardere monitoring die de wegen veiliger kan maken en het verkeersbeheer responsiever.
Het probleem van huidige verkeerstracking
Traditionele systemen behandelen elke camera bijna als een eigen wereld. Eerst detecteren ze voertuigen in elke video, daarna bouwen ze korte paden voor elk voertuig binnen het gezichtsveld van één camera. Pas na het bekijken van lange stukken opgenomen video proberen ze deze paden over camera’s heen te “naaien” met zware data-clustering en handgemaakte regels over weglayouts en cameraposities. Deze offline, achteraf-uitgevoerde werkwijze is traag, verbruikt veel rekenkracht en heeft moeite wanneer verkeersscènes veranderen, camera’s worden verplaatst of nieuwe gezichtspunten worden toegevoegd. Het worstelt ook wanneer camera’s voertuigen in sterk verschillende schalen en hoeken zien, waardoor dezelfde auto er als twee totaal verschillende voertuigen uit kan zien.
Een nieuwe aanpak: alles in realtime volgen
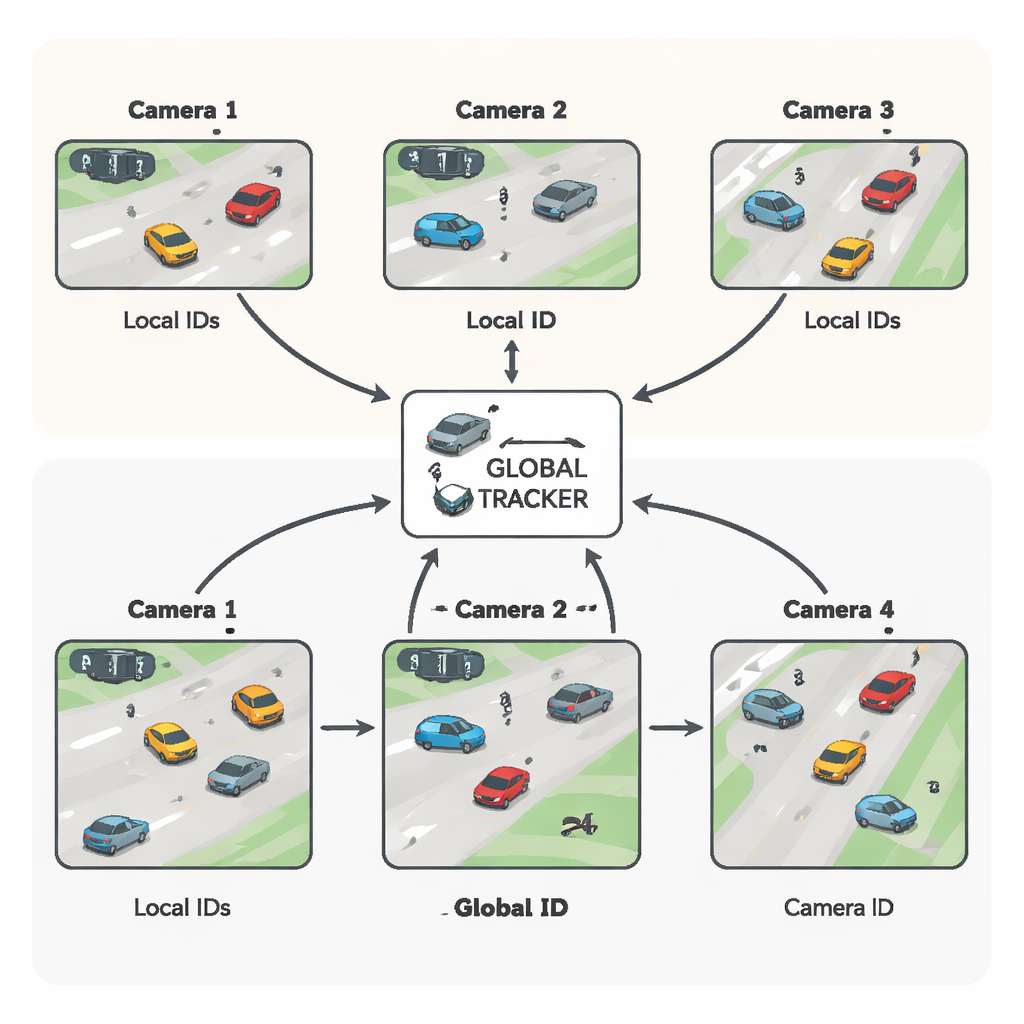
De onderzoekers stellen een nieuw raamwerk voor, Dynamic Global Tracking (DGT), dat vanaf de basis is ontworpen voor realtime gebruik. In plaats van te wachten totdat alle video is verzameld en daarna voertuigpaden te koppelen, bouwt DGT die koppelingen direct op. Elke camera detecteert nog steeds voertuigen en creëert korte in-camera tracks, maar zodra deze tracks worden geüpdatet, worden ze onmiddellijk vergeleken met tracks van andere camera’s. Een klassiek matchingsalgoritme bepaalt of twee tracks vanuit verschillende gezichten bij dezelfde auto horen. Dit online, stapsgewijze proces vervangt massale clustering over alle historische data, vermindert de rekenbelasting en maakt het mogelijk om live verkeer bij te houden.
Dezelfde auto vanuit verschillende hoeken herkennen
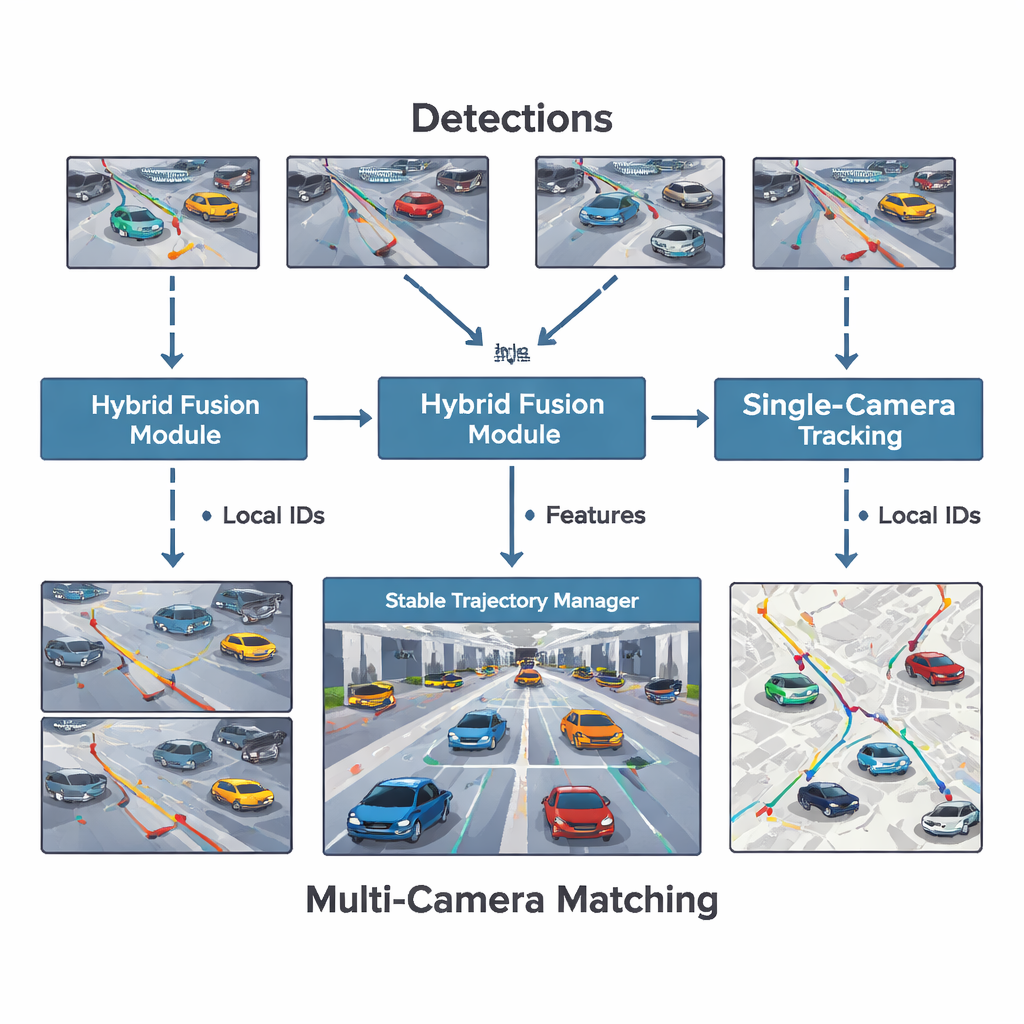
Een grote uitdaging is dat hetzelfde voertuig in de ene camera groot en gedetailleerd kan verschijnen en in een andere klein en wazig, of anders verlicht in een tunnel dan op een open weg. Om hiermee om te gaan bevat DGT een Hybrid Fusion Module die fijne details en bredere context uit elk beeld mengt. Hij verwerkt frames op twee manieren tegelijk: de ene tak richt zich op scherpe, kleinschalige details zoals randen en texturen, terwijl de andere tak meer op globale patronen en context focust. Het systeem combineert vervolgens beide perspectieven tot een enkele, stabiele beschrijving van het uiterlijk van het voertuig. Tests tonen aan dat deze aanpak het vertrouwen van het systeem hoog houdt, zelfs wanneer de grootte of scherpte van de auto drastisch verschilt tussen camera’s.
Tracks stabiel en betrouwbaar houden
DGT introduceert ook een Stable Trajectory Manager, die werkt als een kwaliteitscontrolecentrum voor trackingbeslissingen. Hij filtert onzekere detecties weg, beheert hoe lang een auto achter een ander voertuig of obstakel kan verdwijnen voordat deze als “weg” wordt beschouwd, en verwijdert objecten die in de loop van de tijd niet bewegen, zoals geparkeerde auto’s of wegbarrières. Zorgvuldig gekozen tijds- en bewegingsdrempels stellen het systeem in staat het verschil te zien tussen een auto die kort in een tunnel wordt verborgen en een auto die daadwerkelijk de scène heeft verlaten of naar een andere camera is gereden. Samen helpen deze regels consistente ID’s voor elk voertuig te behouden en verminderen ze plotselinge sprongen, verlies of foutieve samenvoegingen tussen tracks.
Wat dit betekent voor de dagelijkse wegen
In grootschalige tests in zowel een Chineuze snelwegtunnel als een druk kruispunt in een Amerikaanse stad behaalde DGT sterke nauwkeurigheid terwijl het snel genoeg draaide voor realtime gebruik. In tegenstelling tot veel eerdere systemen die voor één type scène waren afgestemd, ging DGT zowel met overlappende als niet-overlappende camerazichten om zonder gedetailleerde handmatige invoer over weglayouts te vereisen. Voor bestuurders en stadsbewoners betekent dit soort robuuste, flexibele tracking dat verkeerscentrales sneller kunnen reageren op ongevallen, opstoppingen of ongebruikelijk gedrag, met een duidelijker, meer continu beeld van hoe voertuigen zich door het netwerk van wegen en camera’s verplaatsen.
Bronvermelding: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Trefwoorden: multi-camera voertuigtracking, intelligente transportsystemen, realtime verkeersmonitoring, computer vision, slimme steden