Clear Sky Science · nl
YOLO11-WLBS: een efficiënt model voor het opsporen van wegdefecten
Waarom betere weginspecties belangrijk zijn
Elke scheur en elk gat in het wegdek is meer dan een lelijk zicht — het kan de levensduur van het asfalt verkorten, voertuigen beschadigen en bijdragen aan ongevallen. Tegenwoordig worden veel wegen nog geïnspecteerd door mensen die langzaam rondrijden met klemboeken of eenvoudige camera’s, wat tijdrovend, kostbaar en foutgevoelig is. Deze studie introduceert YOLO11‑WLBS, een slimmer en lichter computervisiemodel dat verschillende soorten wegschade in realtime kan opsporen, zelfs op een smartphone of drone, en belooft snellere en veiligere onderhoudsactiviteiten voor onze wegen.
Van trage patrouilles naar slimme camera’s
Naarmate het verkeer toeneemt en wegennetwerken groeien, worden defecten zoals transversale en longitudinale scheuren, alligator‑scheuren, schuine scheuren, kuilen en reparatiepatches steeds vaker. Traditionele inspecties — wandelende of rijdende onderzoeken of eenvoudige beeldverwerking — vertrouwen sterk op menselijke beoordeling en hebben moeite bij slechte verlichting of drukke scènes. In het afgelopen decennium hebben deep learning en met name de YOLO-familie van objectdetectienetwerken de beeldanalyse veranderd door patronen direct uit ruwe beelden te leren. Eerdere op YOLO gebaseerde wegdetectiesystemen verbeterden de nauwkeurigheid, maar ondervonden nog steeds een fundamenteel compromis: modellen die nauwkeurig genoeg waren, waren vaak te groot en te traag voor realtime gebruik op drones, voertuigen of draagbare apparaten.
Een afgestemde motor gebouwd op YOLO11
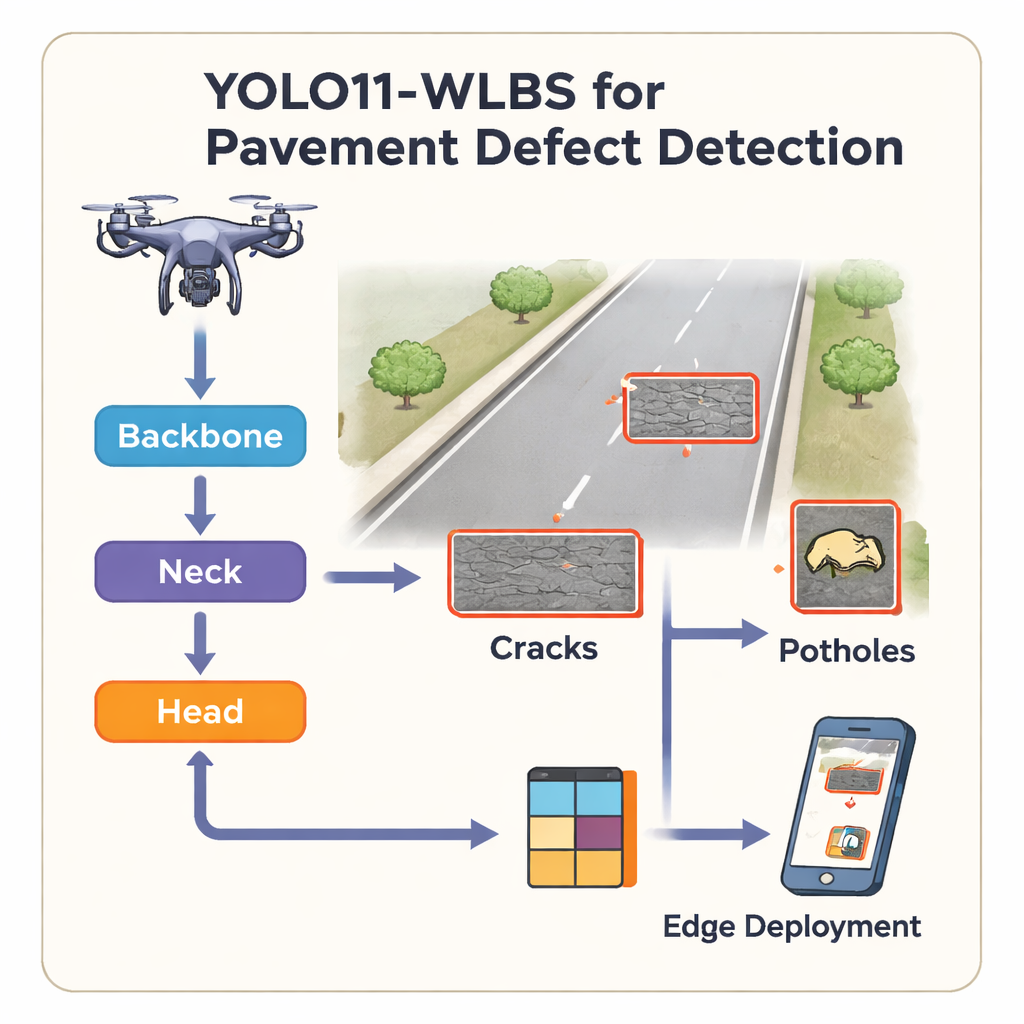
De auteurs gaan uit van YOLO11, een modern objectdetectienetwerk dat al een balans vindt tussen snelheid en nauwkeurigheid, en stemmen het af op de specifieke uitdagingen van wegdekbeelden. Hun verbeterde model, YOLO11‑WLBS genaamd, behoudt het gebruikelijke driedelige ontwerp — een “backbone” voor feature‑extractie, een “neck” voor het combineren van informatie op verschillende schalen en een “head” voor het tekenen van kaders en labels rond defecten — maar voegt vier zorgvuldig gekozen verbeteringen toe. Samen scherpen deze aanvullingen het vermogen van het model om fijne scheuren te zien, verbeteren ze de verwerking van verschillende defectgroottes en verminderen ze onnodige rekenlast, zodat het efficiënt op edge‑apparaten kan draaien.
Vier slimme trucs om scheuren te zien
De eerste verbetering gebruikt waveletgebaseerde convolutie om hoogfrequente details te benadrukken — de scherpe helderheidsveranderingen die scheuren en kleine gaten omlijnen — zonder het model onnodig te verzwaren. Dit helpt het systeem zwakke, dunne of onregelmatige defecten te detecteren die standaardfilters kunnen missen. Vervolgens organiseert een “lightweight adaptive extraction”-stap de featuremaps zodanig dat het netwerk zijn inspanning richt op de meest informatieve kanalen, terwijl het totale aantal parameters met ongeveer een kwart wordt teruggebracht. Een bidirectionele featurepiramide laat informatie omhoog en omlaag stromen tussen grove en fijne schalen, wat de herkenning verbetert van zowel zeer kleine barstjes als grotere, verbonden scheurpatronen. Ten slotte benadrukt een eenvoudige aandachtmechaniek de belangrijkste gebieden in elke featuremap, waardoor de detector naar echte defecten wordt geleid en wordt afgeleid van ruis zoals rijstrookmarkeringen, schaduwen of vlekken.
Aantonen dat het in de praktijk werkt
Om YOLO11‑WLBS te testen, trainde en evalueerde het team het op hoge resolutie dronebeelden van echte wegdekdelen, met meer dan tienduizend gelabelde defecten verdeeld over zes categorieën. Vergeleken met het oorspronkelijke YOLO11 verhoogt het nieuwe model de precisie van 0,853 naar 0,947 en de recall van 0,698 naar 0,895, wat betekent dat het zowel minder valse alarmen geeft als veel minder defecten mist. De algehele detectiescore (mAP@0.5) stijgt met 12,2%, terwijl het aantal parameters met ongeveer 25,5% afneemt. Het systeem blijft nauwkeurig bij lage en hoge belichting en wanneer beelden vervaagd of gereduceerd zijn, en het transferreert goed naar een aparte dronedataset met andere gezichtspunten en lagere resolutie. De auteurs zetten zelfs een volledig gequantiseerde versie in op een Android‑smartphone, waarmee bijna 30 frames per seconde worden gehaald voor live videodetectie van meerdere scheurtypes.
Wat dit betekent voor bestuurders en steden
In eenvoudige woorden is YOLO11‑WLBS een snellere, scherpere blik voor onze wegen. Door betere randdetectie te combineren met slimmer gebruik van modelcapaciteit, multi‑scale featurefusie en lichte aandacht, vindt het meer defecten terwijl het op bescheiden hardware zoals drones en telefoons draait. Dit maakt het praktisch om lange wegvakken frequent te scannen, problemen vroeg te signaleren en reparaties efficiënter te plannen, allemaal zonder grote teams de weg op te sturen. Hoewel het model nog steeds enige moeite heeft met zeldzame defecten zoals kuilen — grotendeels omdat er minder voorbeelden zijn om van te leren — biedt het een sterke basis voor toekomstige systemen die niet alleen detecteren waar het wegdek beschadigd is maar ook de ernst van de schade schatten, en zo steden richting veiligere en kostenefficiëntere onderhoudsstrategieën leiden.
Bronvermelding: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Trefwoorden: opsporen van wegdefecten, detectie van wegkralen en scheuren, YOLO11-WLBS, inspectie met drone, edge-AI