Clear Sky Science · nl
De oceaanbodem verkennen: verborgen schatten onthullen met IoT en een ensemble van diepe hybride leermodellen
Waarom de verkenning van de zeebodem een hightech upgrade krijgt
De diepe oceaan en de bodem eronder verbergen kabels, pijpleidingen, oude ruïnes en kwetsbare ecosystemen. Toch maken troebel water, opstuivend zand en zwakke signalen het verrassend moeilijk om te zien wat daar beneden ligt. Dit artikel beschrijft een nieuwe manier om allerlei soorten sensoren te combineren met kunstmatige intelligentie, zodat onderwaterrobots en bewakingssystemen belangrijke objecten nauwkeuriger, sneller en met minder energie kunnen detecteren. Het werk kan helpen marien leven te beschermen, infrastructuur te beveiligen en nieuwe mogelijkheden in de verkenning te openen.
Veel sensoren, één gedeeld beeld van de diepte
De huidige onderwaterdetectie leunt vaak op één zintuig: een sonarpuls, een videocamera of één type bodemsensor. Elk functioneert goed onder ideale omstandigheden, maar menigmaal falen ze wanneer het water troebel wordt, het licht afneemt of ruis binnendringt. De onderzoekers zien de oceaan liever als een door Internet of Things bewaakte omgeving: kleine, gekoppelde apparaten die op verschillende manieren luisteren, kijken en voelen. Hun systeem voegt data van camera’s, grondradar, seismische trillingssensoren, thermische sondes en elektromagnetische detectoren samen tot één gedeelde stroom voor analyse. Door deze verschillende waarnemingen te mengen, kan het systeem een object nog herkennen wanneer één sensor verward is door modder, bellen of reflecties. 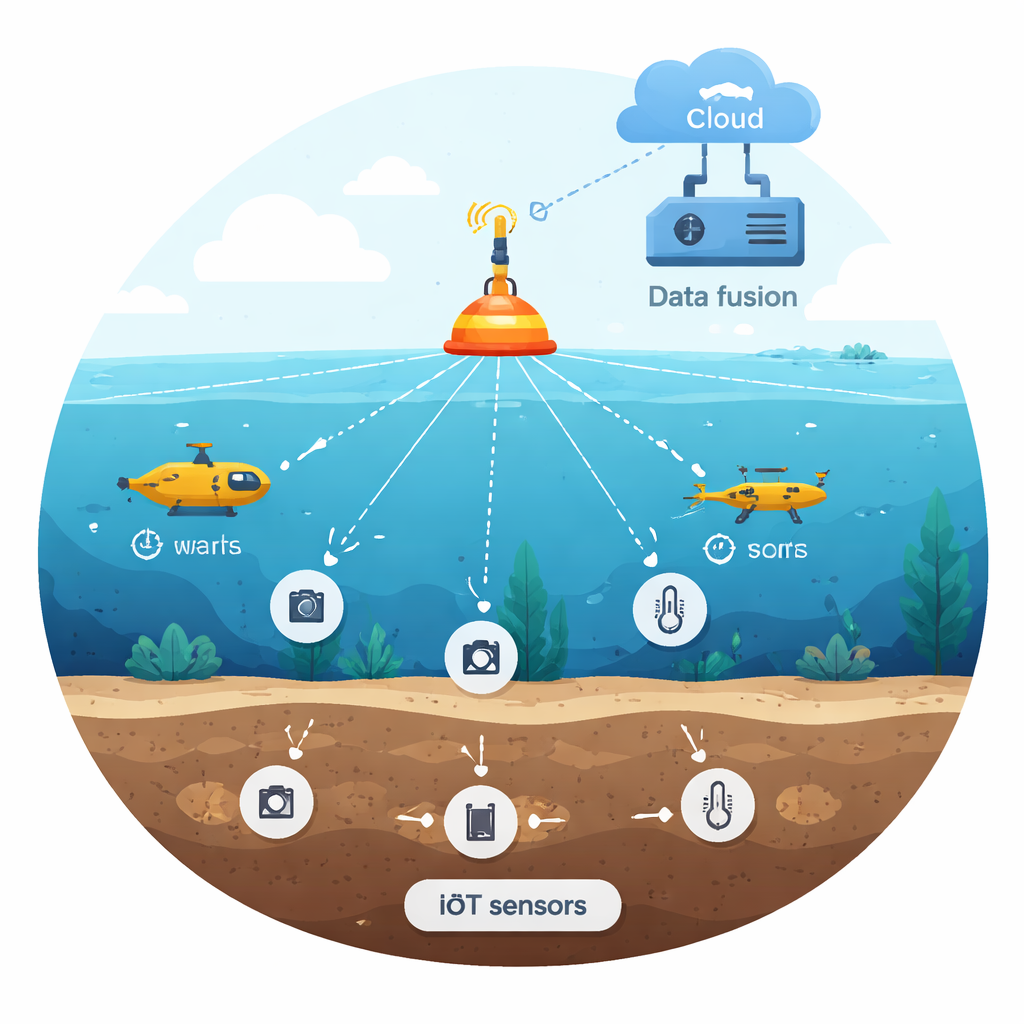
Vervuilde signalen opruimen voordat ze de ‘hersenen’ bereiken
Ruwe data die onder water verzameld wordt, is verre van perfect. Het zit vol willekeurige pieken, gaten en vreemde metingen door stromingen, dieren en elektronische storingen. Voordat een slim algoritme beslissingen neemt, voeren de auteurs deze data door een zorgvuldige reinigingsketen. Ze gebruiken mediaanfilters om plotselinge ruis te verzachten zonder echte kenmerken te vervagen, statistische controles om uitbijters te signaleren en te verwijderen, en synchronisatie zodat metingen van verschillende apparaten in de tijd op één lijn liggen. Ze schalen waarden ook opnieuw zodat een sterke sensor niet de zwakkere overschaduwt, transformeren eendimensionale radarsporen naar beelden, en passen moderne technieken toe om honderden metingen te reduceren tot een kleinere, informatievere set. Dit alles is erop gericht dat het leersysteem een scherp beeld ziet in plaats van een chaotische waas.
Een hybride leerengine die patronen ziet en beslissingen neemt
In het hart van de aanpak staat wat de auteurs een Ensembled Deep Hybrid Learning (EDHL) model noemen. Het heeft twee hoofdonderdelen die complementaire rollen vervullen. Ten eerste fungeert een Inception‑achtige diepe neurale netwerkmodule als de “ogen”, die sensorgebeelden op meerdere schalen tegelijk scant om zowel fijne details, zoals een kabel, als grotere vormen, zoals een rotsformatie, te grijpen. Hieruit genereert het rijke numerieke beschrijvingen van elke scène. Ten tweede werkt een gradient boosting‑classifier als het “beslissingscomité.” Die bouwt vele kleine beslisboommodellen die elkaars fouten corrigeren en zo geleidelijk naar het juiste oordeel over het aanwezige object toewerken. Een stap voor kenmerkselectie kiest alleen de meest informatieve signalen, wat geheugen beperkt en het eindsysteem versnelt zonder weg te gooien wat het belangrijkst is. 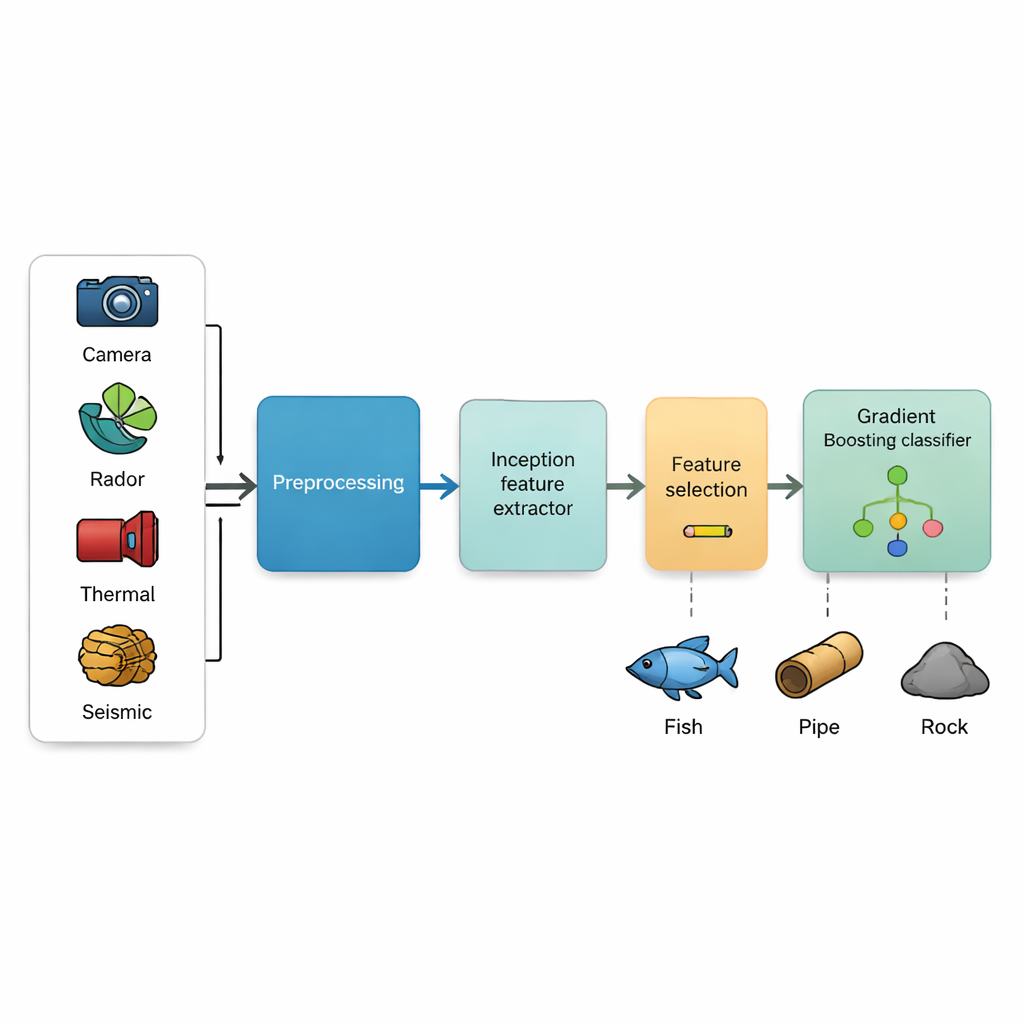
Het systeem op de proef stellen
Om te beoordelen of hun ontwerp in de praktijk werkt, trainde en evalueerde het team het met een grote openbare collectie onderwaterbeelden die vissen, koraal, sponzen, zeewier, schelpen, schaaldieren en andere zeebodemscènes bevat. Ze vergeleken vele varianten van dataruisverwijdering en kenmerkselectie, en zetten hun model af tegen bekende deep learning‑systemen zoals klassieke convolutionele netwerken, ResNet, DenseNet, EfficientNet, capsule‑netwerken en zelfs transformer‑gebaseerde modellen. De EDHL‑opstelling, vooral in combinatie met zorgvuldige ruisverwijdering en correlatiegebaseerde kenmerkselectie, bereikte een nauwkeurigheid boven 98%, met veel minder valse alarmen en gemiste objecten dan de concurrenten. Belangrijk is dat deze hoge prestatie behouden bleef terwijl het model draaide op bescheiden hardware vergelijkbaar met wat op edge‑apparaten gebruikt zou kunnen worden, niet alleen op krachtige servers in het lab.
Wat dit betekent voor toekomstige oceaanverkenning
Voor niet‑specialisten is de kernboodschap dat de auteurs een slimmer ‘voel‑en‑denk’ systeem voor de onderwaterwereld hebben ontwikkeld. Door diverse IoT‑sensoren te koppelen aan een hybride leerengine laten ze zien dat het mogelijk is zeebodemobjecten zeer betrouwbaar te detecteren en classificeren zonder omvangrijke computers of perfecte zichtomstandigheden. In de toekomst zou dit soort technologie vlootjes onderwaterrobots kunnen helpen de oceaanbodem in kaart te brengen, kwetsbare habitatten te monitoren, vervuiling te traceren en begraafde infrastructuur te inspecteren met minder fouten en lager energieverbruik. Het verandert de rommelige, vijandige omgeving van de diepte in een plek waar digitale zintuigen eindelijk duidelijk genoeg kunnen zien om de verborgen schatten te ontsluiten.
Bronvermelding: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Trefwoorden: detectie van onderwaterobjecten, IoT-sensoren, deep learning, mariene verkenning, multimodale sensing