Clear Sky Science · nl
Ontwerp en implementatie van een 6-DoF-robotarmbesturing met objectdetectie op basis van machine learning met een mini-microcontroller
Slimmere robotarmen met een kleiner budget
Stel je een fabrieksrobotarm voor die een object kan herkennen, bepalen hoe het vast te pakken en soepel op zijn plaats te bewegen — allemaal zonder afhankelijk te zijn van een omvangrijke computer of cloudverbinding. Dit artikel beschrijft precies dat: een zespuntige (6-DoF) robotarm die ziet en beslist met behulp van een kleine, goedkope microcontroller. Voor lezers die geïnteresseerd zijn in hoe kunstmatige intelligentie het datacenter verlaat en in alledaagse machines terechtkomt, laat dit werk zien hoe geavanceerde visie en besturing kunnen draaien op hardware die niet veel groter is dan een USB-stick.
Waarom het verkleinen van robotbrains belangrijk is
Traditionele industriële robots zijn vaak afhankelijk van krachtige externe computers om objecten te herkennen en bewegingen te plannen. Dat brengt extra kosten, bekabeling en technische complexiteit met zich mee, wat een drempel kan zijn voor kleine en middelgrote ondernemingen. De auteurs wilden aantonen dat een enkele goedkope microcontroller bijna alles kan: objecten zien, bepalen waar ze zich in 3D bevinden, plannen hoe de arm moet bewegen, en de motoren aansturen die de taak uitvoeren. Door de verwerking aan boord te houden, wordt het systeem draagbaarder, energiezuiniger en eenvoudiger inzetbaar in krappe of veranderende omgevingen, van kleine fabrieken tot leslokalen.
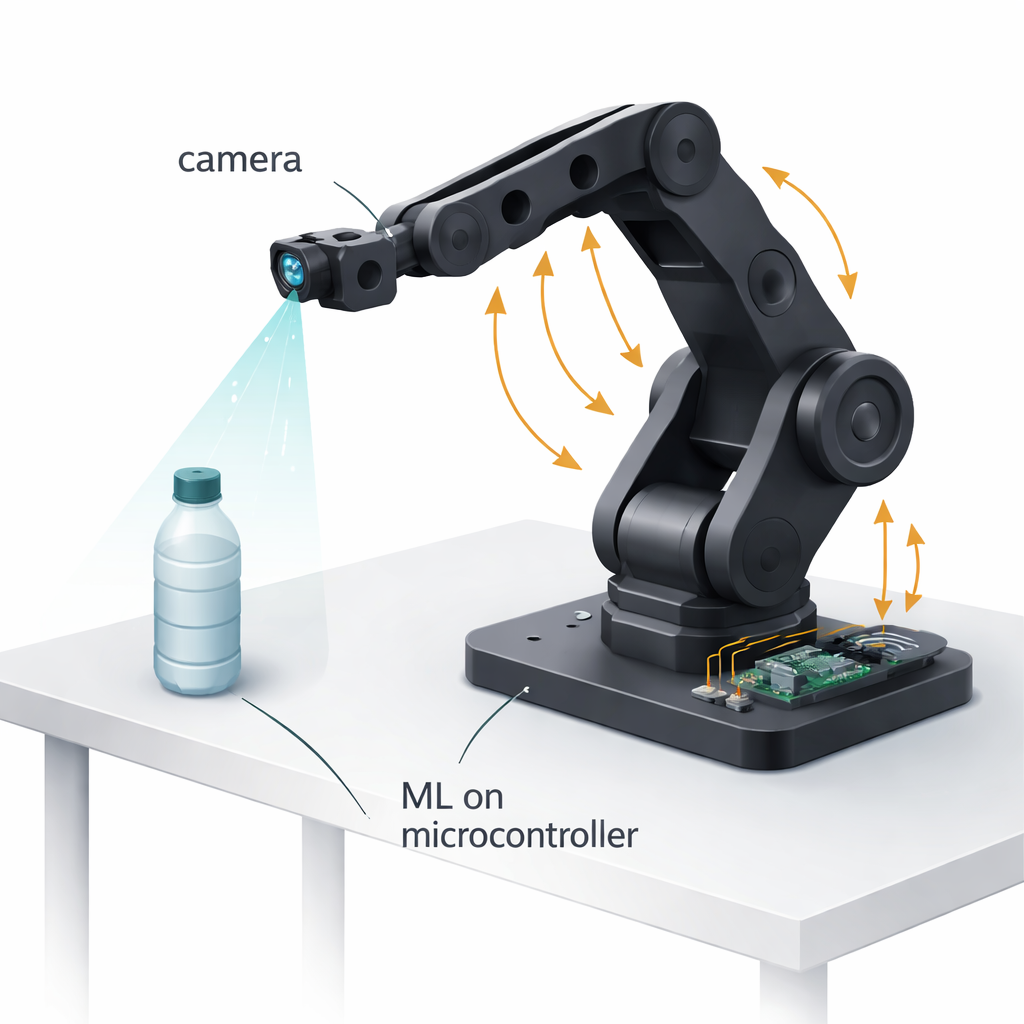
Een flexibele arm die zichzelf bouwt
Het team ontwierp een zespuntige robotarm vanaf het begin, grotendeels opgebouwd uit 3D-geprinte kunststof onderdelen om het licht en betaalbaar te houden. Servomotoren met hoog koppel bewegen elk gewricht, en de onderzoekers hebben deze motoren aangepast zodat ze hun exacte hoeken in realtime kunnen teruglezen, wat nauwkeurige gesloten-lussbesturing mogelijk maakt. Een op maat gemaakte tweevingergrijper aan de tip bevat een eenvoudige stroommeter: door te volgen hoeveel elektrische stroom de grijpermotor trekt, kan het systeem afleiden hoe sterk er wordt geknepen en automatisch de grip aanpassen om objecten stevig vast te houden zonder ze te verpletteren of te laten vallen. Op de ‘pols’ van de arm is een kleine full-hd-camera gemonteerd die met de arm meebeweegt en het systeem een eerstepersoonsperspectief van de scène voor de grijper geeft.
Een kleine chip leren flessen te zien
In het hart van het visionsysteem staat een compacte versie van een populair objectdetectienetwerk genaamd YOLOv7-tiny. De onderzoekers trainden dit model op meer dan 2.500 beelden van plastic waterflessen die onder verschillende lichthoeken, afstanden en gedeeltelijke obstructies zijn vastgelegd. Na training op een krachtige grafische kaart comprimeerden ze het model naar een 8-bits "tiny ML"-vorm zodat het in het beperkte geheugen en de rekencapaciteit van de AMB82-Mini microcontroller paste. Zelfs in deze afgeslankte vorm behaalde het model ongeveer 88% nauwkeurigheid bij het herkennen van flessen en draaide het snel genoeg — circa 7–8 frames per seconde — voor realtime pick-and-placewerk direct op de microcontroller, zonder hulp van een pc of de cloud.
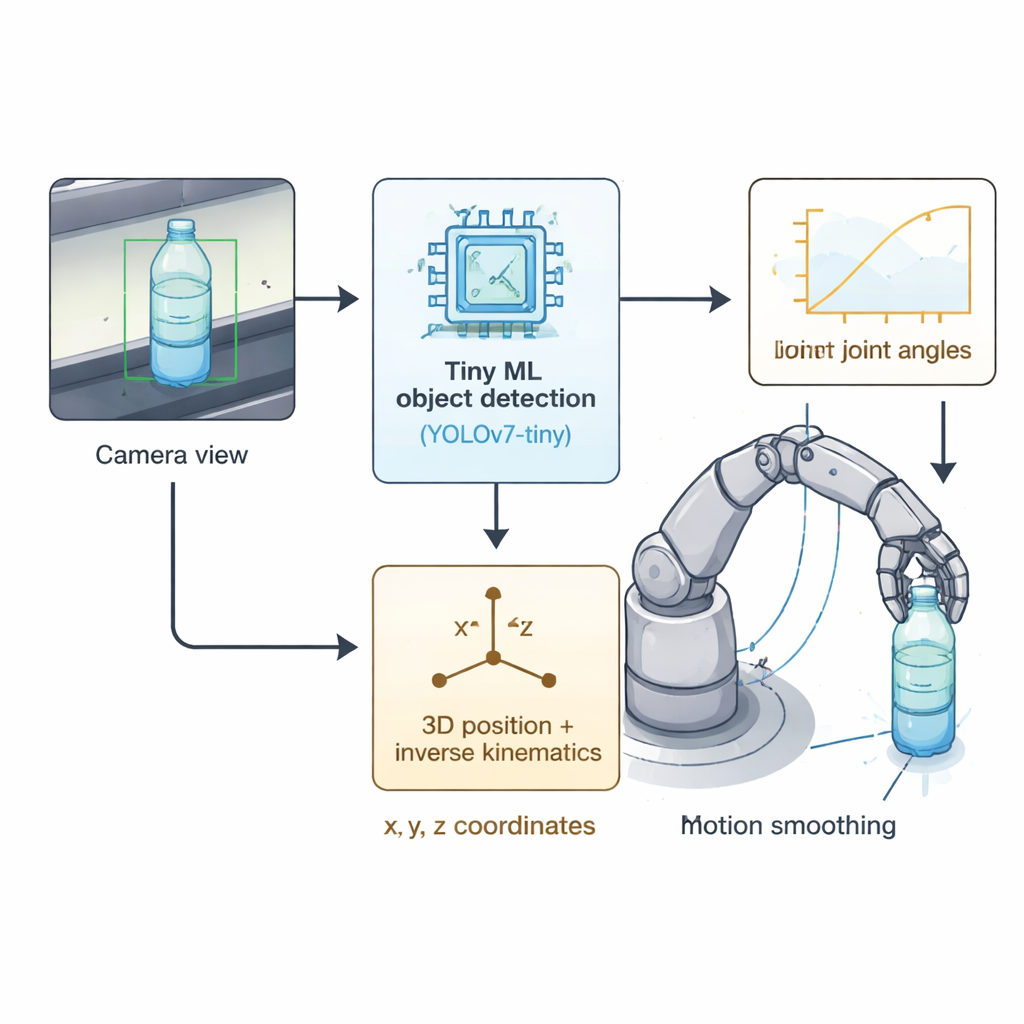
Van pixels naar nauwkeurige beweging
Zodra de camera een fles detecteert, berekent het systeem het midden van het detectievak in de afbeelding en schat het de afstand tot het object op basis van hoe groot het in pixels verschijnt. Dat levert x-, y- en z-coördinaten in de ruimte op. Een aangepaste wiskundige solver vertaalt die coördinaten vervolgens naar de zes gewrichtshoeken die de arm moet aannemen, gebruikmakend van standaard robotgeometrie maar geoptimaliseerd om snel op de kleine processor te draaien. De besturingssoftware, georganiseerd als een eenvoudige toestandsmachine, doorloopt vinden van een object, er naartoe bewegen, de grijper sluiten met de stroommeter als voelervoeler, en vervolgens het object naar een vaste afzetplaats brengen. Om bewegingen soepel te houden en trillen te vermijden, gebruikt het team zorgvuldig gevormde bewegings-easingcurves en een speciale spanningsmodulatiemethode die motorgepiep en overshoot vermindert.
Praktische tests en wat ze aantonen
In herhaalde experimenten toonde het geïntegreerde systeem aan dat het betrouwbaar plastic flessen tot 300 gram kon oppakken en plaatsen met een succesratio van 100%, en nog steeds goed presteerde bij zwaardere lasten tot 500 gram. Simulaties en metingen lieten zien dat positioneringsfouten doorgaans rond één millimeter lagen — voldoende nauwkeurig voor veel sorteertaken en verpakkingswerk. Vergeleken met eenvoudigere besturingsschema’s verminderde de motorbesturingsstrategie van de auteurs trillingen, verkortte de tijd die de arm nodig had om te stabiliseren en elimineerde schokkerig gedrag. Hoewel de tests zich richtten op één objecttype en vaste afstanden in gecontroleerde binnenomstandigheden, leveren ze overtuigend bewijs dat serieuze robotperceptie en -besturing in één zeer bescheiden embedded board passen.
Wat dit betekent voor alledaagse automatisering
Voor niet-specialisten is de belangrijkste conclusie dat geavanceerde ‘zien’ en ‘bewegen’ niet langer beperkt zijn tot dure, krachtige robots. Door tiny machine-learningmodellen, slimme geometrie en zorgvuldige motorbesturing te combineren op een goedkope microcontroller, laat dit werk een weg zien naar compacte, zelfvoorzienende robotarmen die kleine fabrikanten, scholen en hobbyisten realistisch kunnen inzetten. Naarmate toekomstige versies meer objecttypen en gevarieerdere omgevingen ondersteunen, zouden soortgelijke embedded systemen stilletjes talloze eenvoudige pick-and-placetaken kunnen automatiseren en intelligente robotica binnen bereik van veel meer mensen en locaties brengen.
Bronvermelding: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Trefwoorden: embedded robotica, tiny machine learning, robotarmbesturing, objectdetectie, industriële automatisering