Clear Sky Science · nl
Een nieuw adaptief neuro-fuzzy en adaptief proportioneel resonant regelschema voor PMSM-gebaseerde toepassingen in elektrische voertuigen
Rustigere, soepelere elektrische ritten
Elektrische auto’s zijn al schoner dan voertuigen op benzine, maar de manier waarop hun motoren worden aangestuurd laat nog ruimte voor verbetering. Plotselinge rukken bij het indrukken van het pedaal, een zwak gezoem van de motor en verspilde energie zijn allemaal terug te voeren op hoe snel en soepel de motor kan reageren op veranderende weg- en verkeersomstandigheden. Dit artikel onderzoekt een nieuwe interne manier om de motor ‘te besturen’—met een combinatie van kunstmatige intelligentie en een speciaal soort signaalvorming—om elektrische voertuigen vloeiender te laten accelereren, minder energie te laten verspillen en beter om te gaan met storingen uit de echte wereld.
Waarom motorregeling telt op echte wegen
Moderne elektrische auto’s gebruiken vaak permanentmagneetmotoren omdat ze compact zijn, efficiënt en krachtig aantrekken vanuit stilstand. Stadrijden is echter rommelig: bestuurders stoppen en starten bij verkeerslichten, laveren door files en krijgen te maken met hellingen en wisselende belastingen. Onder deze omstandigheden kan de motorsnelheid overshooten of achterblijven bij wat de bestuurder vraagt, en kan het draaimoment op de as rimpelen. Die rimpels uiten zich als trillingen, geluid en extra belasting van tandwielen en lagers. Traditionele regelsystemen, die vertrouwen op vaste afstemmingen, werken goed alleen binnen een beperkt bereik van omstandigheden en kunnen moeite hebben wanneer de weg, temperatuur of voertuigbelasting verandert.
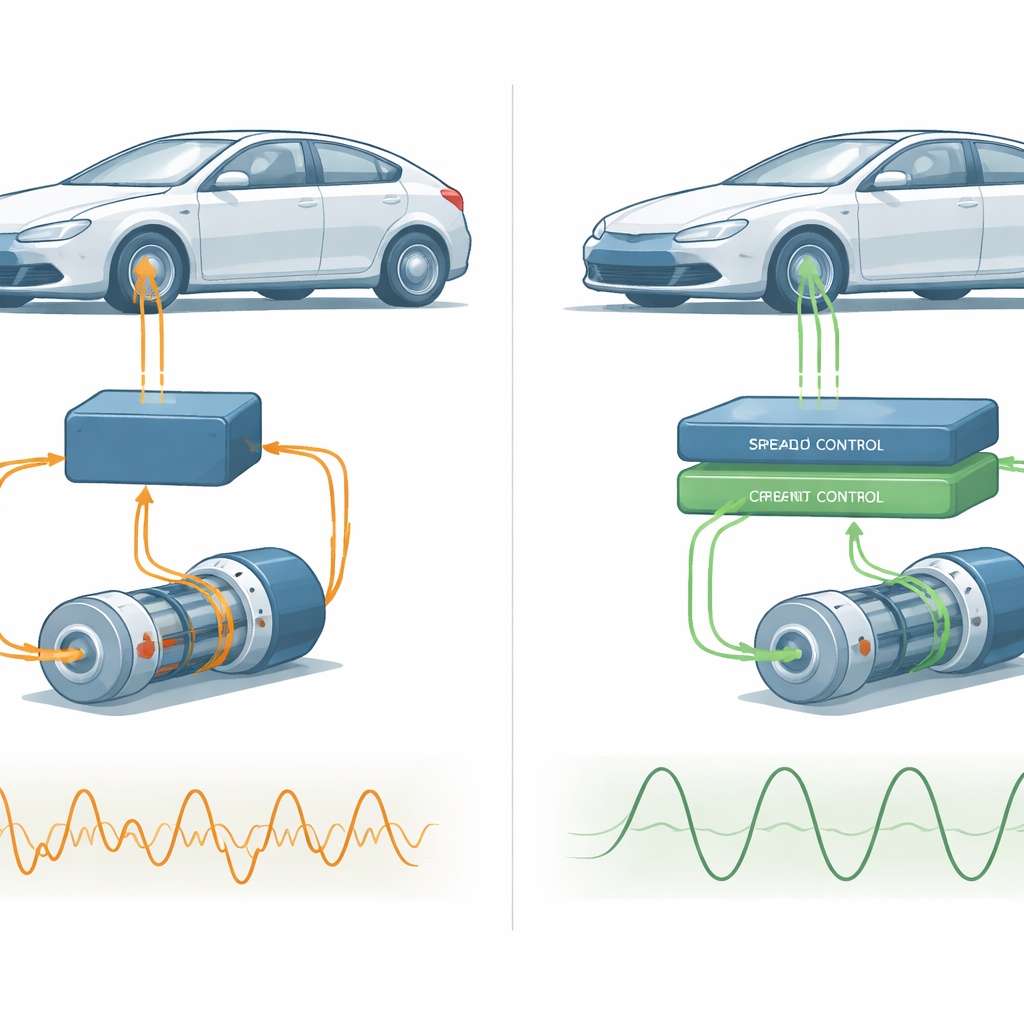
Leren en regels combineren voor betere snelheidsregeling
De auteurs vervangen de gebruikelijke buitenste snelheidsregelaar door een adaptief neuro-fuzzy systeem—een regelaar die de als-dan-regels van fuzzy logic combineert met het leervermogen van neurale netwerken. In plaats van éénmaal handmatig in te stellen in de fabriek leert deze regelaar aan de hand van voorbeelddata hoe de motorsnelheid reageert op commando’s en storingen. Hij zet ruwe snelheidsfouten (hoe ver de werkelijke snelheid afwijkt van de gewenste) en de snelheid waarmee die fout verandert om in een set overlappende “meningen”, en weegt die vervolgens samen tot een precieze correctie. Trainings- en testresultaten laten zien dat deze geleerde regelaar snel instellingen vindt die overshoot en ondershoot verminderen, de tijd om de doelsnelheid te bereiken verkorten en het gedrag stabiel houden, zelfs wanneer het systeem niet-lineair is en aan verandering onderhevig.
Stroom vormgeven voor rustige, stille werking
Terwijl de buitenste lus beslist hoe snel de motor moet draaien, bepaalt de binnenste lus hoeveel elektrische stroom op elk moment door de spoelen vloeit. Hier introduceren de auteurs een adaptieve proportioneel resonante regelaar. In plaats van alleen te reageren op de grootte van de fout, is deze regelaar afgestemd om speciale aandacht te geven aan stromen op de belangrijkste wisselfrequentie van de motor, waar ongewenste rimpels het schadelijkst zijn. Door zorgvuldig een paar sleutel-afstemmingswaarden te kiezen, levert hij zeer sterke correctie bij die grondfrequentie zonder instabiliteit elders te veroorzaken. Het resultaat is een stroom die bijna op een perfecte sinus lijkt, met veel minder scherpe oneffenheden die anders als koppelrimpel en hoorbaar gejank zouden verschijnen.
De nieuwe strategie op de proef stellen
Het team evalueert hun tweefasige ontwerp—neuro-fuzzy snelheidsregeling in de buitenste lus en resonante stroomregeling in de binnenste lus—middels gedetailleerde computersimulaties en hardware-in-the-loop experimenten die een echte elektrische aandrijflijn nabootsen. Ze vergelijken het met drie gevestigde methoden: een conventionele proportioneel–integraal regelaar, een schema dat die regelaar combineert met een resonante binnenlus, en een modelpredictieve benadering. Over een reeks scenario’s—opstart vanuit rust, constant rijden onder belasting, snelle snelheidsveranderingen bij constante belasting en plotselinge belastingsveranderingen bij constante snelheid—bereikt het nieuwe schema consequent sneller de doelsnelheid, met kleinere pieken en dalen. Het levert ook soepeler koppel en schonere stromen, zelfs wanneer de weerstand en inductantie van de motor kunstmatig worden verschoven om verwarming of ruwe omgevingen te imiteren.
Wat dit betekent voor toekomstige elektrische auto’s
In eenvoudige bewoordingen laat deze hybride regelingstrategie een elektromotor meer denken en zich aanpassen in plaats van blindelings een vast recept te volgen. Door te leren storingen op snelheidsniveau te onderdrukken en door de stroomvormen binnen de motor te vormen, vermindert de aanpak trillingen, geluid en verspilde energie. Voor bestuurders vertaalt dat zich in soepelere acceleratie, stabieler cruisen en aandrijflijnen die beter kunnen omgaan met verouderende componenten en veranderend weer. Hoewel de methode in delen nog uitgaat van een vaste bedrijffrequentie, suggereren de resultaten dat het toevoegen van intelligentie en frequentiebewuste regeling aan motoraandrijvingen een belangrijke stap kan zijn naar verfijndere, duurzamere en efficiëntere elektrische voertuigen.
Bronvermelding: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Trefwoorden: elektrische voertuigmotoren, neuro-fuzzy besturing, permanent magneet synchrone motor, vermindering van koppelrimpel, geavanceerde motoraandrijvingen