Clear Sky Science · nl
Fuzzy glijdingsmodusregeling op basis van het super-twisting-algoritme voor descriptor T‑S fuzzy systemen
Complexe systemen beheersbaar maken
Van het beheer van visbestanden tot het stabiel houden van elektriciteitsnetten en elektronische schakelingen: veel systemen in de praktijk gedragen zich ingewikkeld en niet-lineair. Ingenieurs gebruiken geavanceerde regelalgoritmen om zulke systemen veilig en efficiënt te houden, zelfs bij storingen en onzekerheden. Dit artikel introduceert een nieuwe regelstrategie die deze lastige systemen soepeler temt en daarbij het harde, snelle schakelen vermijdt dat apparatuur kan beschadigen en de prestaties kan verslechteren.
Waarom sommige systemen moeilijk te regelen zijn
Veel praktische systemen worden niet alleen beschreven door differentievergelijkingen die aangeven hoe grootheden in de tijd veranderen, maar ook door algebraïsche beperkingen die op elk moment moeten gelden. Dergelijke descriptorsystemen komen voor in economie, energienetwerken, mechanische koppelingen en biologische modellen. Om hun niet-lineaire gedrag te behandelen gebruiken onderzoekers vaak Takagi–Sugeno (T‑S) fuzzy modellen, die een complex systeem voorstellen als een samenvoeging van eenvoudigere lineaire deelmodellen die gelden in verschillende bedrijfsregimes. Hoewel krachtig, kende dit kader lange tijd een technische belemmering: de meeste regelmethoden gingen uit van vooraf bekende eigenschappen van de fuzzy "lidmaatschapsfuncties" in de tijd, terwijl die veranderingen in werkelijkheid afhangen van de onbekende toekomstige dynamiek van het systeem en de regelaar.
Een soepelere vorm van robuuste regeling
Glijdingsmodusregeling is een veelgebruikte robuuste regelmethode die bekendstaat om het vermogen een systeem snel op een gewenste baan te dwingen en daar te houden ondanks storingen. Dit gebeurt door de stuuringreep zodanig te schakelen dat onzekerheden worden gecorrigeerd. Het snelle schakelen kan echter "chattering" veroorzaken — hoogfrequente oscillaties die onwenselijk of zelfs schadelijk zijn in mechanische en elektrische systemen. Het super‑twisting-algoritme, een geavanceerdere vorm van glijdingsmodusregeling, verbergt het schakelen in een interne structuur en levert een continue sturing die robuustheid behoudt en chattering vermindert. Tot nu toe was deze techniek voornamelijk beperkt tot eén‑inputsituaties of vereiste ze het ontleden van multi‑inputsystemen in veel aparte regelaars, wat rekenkundig belastend is.
Een nieuwe glijoppervlakte zonder verborgen veronderstellingen
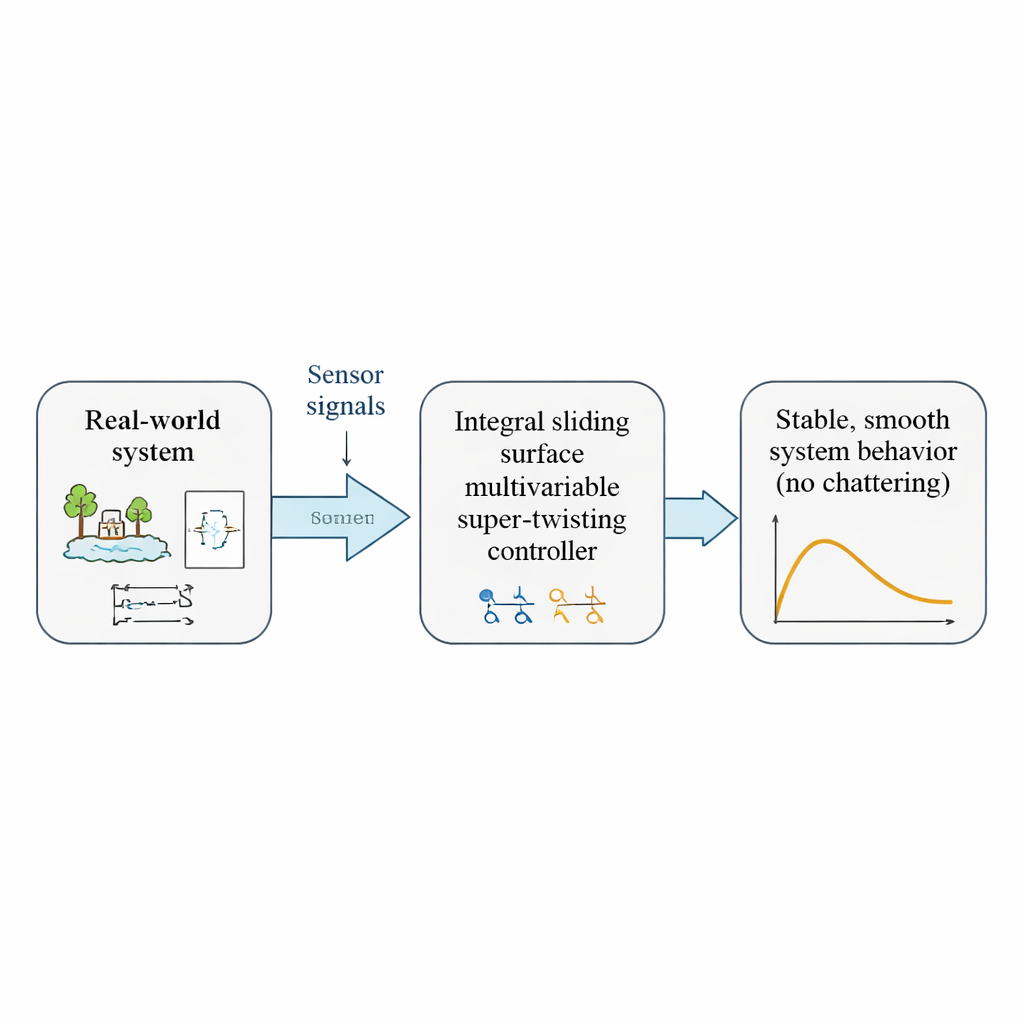
De eerste belangrijke bijdrage van de auteurs is een nieuw type "integraal" glijoppervlakte, specifiek ontworpen voor descriptor T‑S fuzzy systemen. In eenvoudige bewoordingen is deze oppervlakte een wiskundige voorwaarde die zowel het huidige als het geaccumuleerde verleden van het systeem omvat. Door deze slim op te bouwen laten de auteurs zien dat ze de gewenste beweging kunnen garanderen zodra het systeem op deze oppervlakte komt, zonder enige voorafgaande kennis van hoe de fuzzy lidmaatschapsfuncties veranderen. Dit verwijdert een beperkende aanname die eerdere methoden beperkte. De analyse gebruikt zorgvuldig gekozen energie‑achtige functies om te bewijzen dat het gedrag van het systeem op de glijoppervlakte in de loop van de tijd stabiel blijft.
Een multivariabele super‑twisting regelaar
Voortbouwend op deze glijoppervlakte ontwikkelt het artikel een multivariabele versie van het super‑twisting‑algoritme. In plaats van voor elke ingang of elke glijdingsvariabele een aparte regelaar te ontwerpen, behandelt de methode ze samen in matrixvorm. Dat maakt het beter geschikt voor systemen waarvan de verschillende toestanden sterk aan elkaar gekoppeld zijn, zoals interacties tussen soorten in een ecosysteem of stromen en spanningen in een schakeling. De auteurs leiden voorwaarden af voor het kiezen van de versterkingsfactoren van de regelaar zodat de systeemtoestanden onmiddellijk de glijoppervlakte bereiken en vervolgens in eindige tijd convergeren. Omdat het stuursignaal continue is in plaats van scherp schakelend, wordt chattering ontwerpmatig onderdrukt, terwijl de robuustheid tegen storingen behouden blijft.
Het idee aantonen in biologie en elektronica
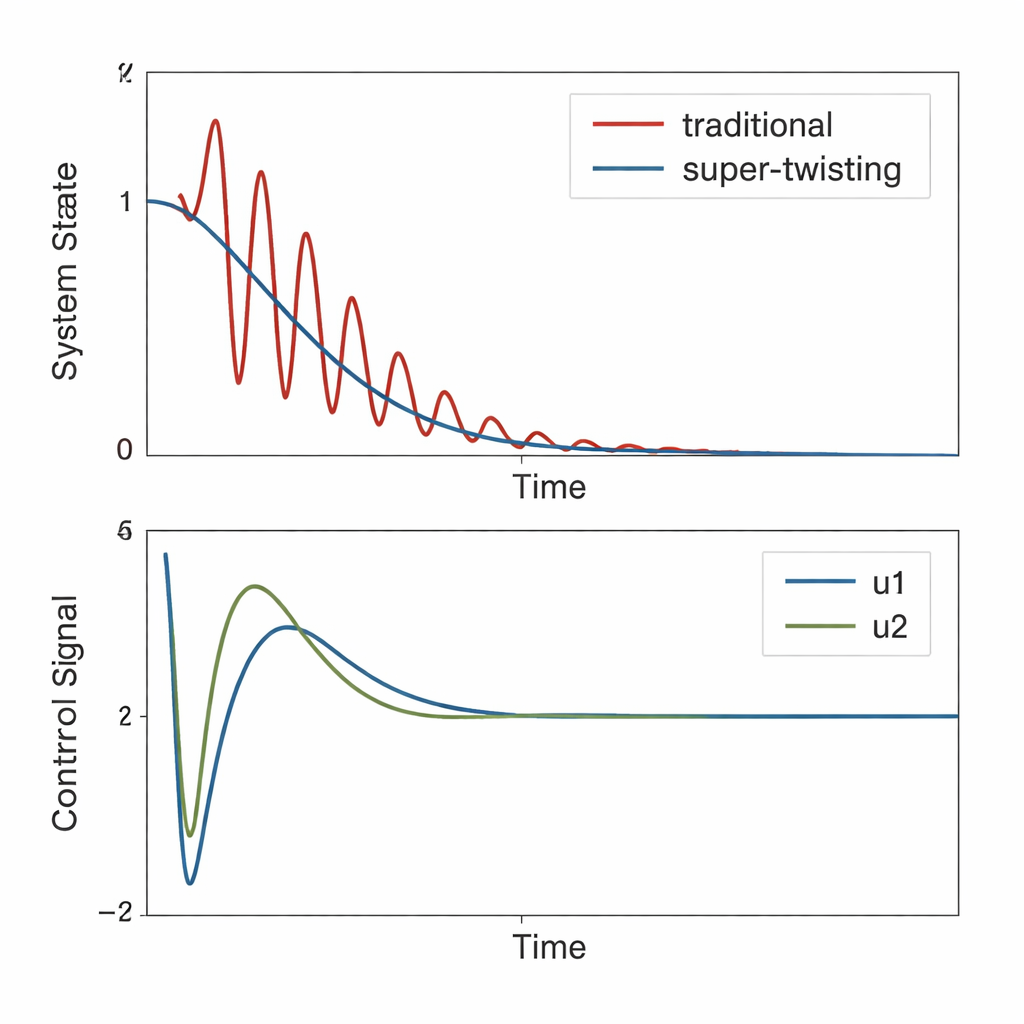
Om de praktische toepasbaarheid van hun methode te laten zien passen de auteurs die toe op twee verschillende niet‑lineaire descriptorsystemen. Het eerste model beschrijft een bio‑economische situatie met onvolwassen en volwassen populaties van een soort, samen met een variabele die de voortplantingscapaciteit en beheersmaatregelen zoals oogst en regulatie vastlegt. Het tweede voorbeeld is een niet‑lineaire tunneldiode‑schakeling, een klassiek testgeval in de elektronica. In beide gevallen tonen simulaties dat de voorgestelde regelaar de systeemtoestanden snel stabiliseert en de glijdingsvariabelen nabij nul houdt, wat duidt op nauwkeurige tracking van het gewenste gedrag. Vergeleken met traditionele glijdingsmodusregelaars reduceert de nieuwe aanpak de oscillaties in zowel systeemrespons als stuursignalen duidelijk.
Wat dit in de praktijk betekent
Voor niet‑experts is de kernboodschap dat dit werk een manier biedt om complexe, geconstrainte en onzekere systemen onder controle te houden zonder het gewelddadige schakelen dat sommige robuuste methoden kenmerkt. Door fuzzy modellering, een integraal glijoppervlakte en een multivariabel super‑twisting‑algoritme te combineren, ontwerpen de auteurs regelaars die zowel wiskundig gegarandeerd stabiel zijn als in de praktijk vloeiender werken. Dit kan toepassingen ten goede komen variërend van ecologisch hulpbronnenbeheer tot geavanceerde vermogenselektronica en netwerkgestuurde regelsystemen, vooral wanneer vervolgwerk deze ideeën uitbreidt naar cyber‑veilige omgevingen waarin communicatie door aanvallen verstoord kan worden.
Bronvermelding: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Trefwoorden: glijdingsmodusregeling, fuzzy systemen, robuuste regeling, nietlineaire dynamica, super-twisting algoritme