Clear Sky Science · nl
Robuuste modelreferentie-adaptieve regelaar voor 3-DOF vlakke manipulator
Slimmere robotarmen voor zwaardere taken
Fabrieksrobotarmen zijn ongelooflijk snel en nauwkeurig, maar hun prestaties kunnen teruglopen zodra de echte wereld zich onvoorspelbaar gedraagt—belastingen veranderen, onderdelen worden iets anders geplaatst of onverwachte krachten schudden de arm. Dit artikel onderzoekt een nieuwe manier om een veelgebruikte drie-gewrichtige robotarm nauwkeurig en stabiel te houden, zelfs wanneer het gedrag moeilijk exact te modelleren is en sterke storingen optreden, waardoor robots betrouwbaardere partners op de productievloer worden.
Waarom drie gewrichten belangrijk zijn in echte fabrieken
De studie richt zich op een driedelig vlakke robot: drie stijve segmenten verbonden door roterende gewrichten die in een plat vlak bewegen. Ondanks de eenvoud vormt deze opstelling de ruggengraat van veel industriële pick-and-place-taken, verpakkingslijnen en assemblagesystemen. De uitdaging is dat de beweging van één gewricht sterke invloed heeft op de anderen en dat de onderliggende vergelijkingen die de beweging van de arm beschrijven sterk niet-lineair en nauw gekoppeld zijn. Traditionele regelaars kunnen goed werken wanneer alles bekend en voorspelbaar is, maar ze hebben moeite wanneer de lading van de robot verandert, wanneer wrijving of massa niet nauwkeurig zijn gemodelleerd of wanneer externe storingen de arm van koers brengen.
Een complexe beweging opdelen in eenvoudiger stukken
Om deze complexiteit te temmen, leiden de auteurs eerst een gedetailleerd wiskundig model van de beweging van de robot af, inclusief hoe massa’s van de schakels, gewrichtshoeken en zwaartekracht samen beweging veroorzaken. Vervolgens introduceren ze een belangrijke vereenvoudiging: een “decoupling”-strategie. In plaats van de robot te behandelen als één ingewikkeld driedelig systeem, wordt elk gewricht gemodelleerd alsof zijn acceleratie voornamelijk afhangt van zijn eigen motorkoppel en snelheid. De overgebleven effecten—zoals interacties tussen gewrichten, zwaartekrachtstermen en andere lastig te modelleren invloeden—worden samengebundeld en als onzekerheden behandeld. Deze decoupling maakt het mogelijk het regelprobleem op te splitsen in drie kleinere, beter hanteerbare subsystemen, één per gewricht, terwijl toch wordt erkend dat het echte systeem onderliggend complex is. 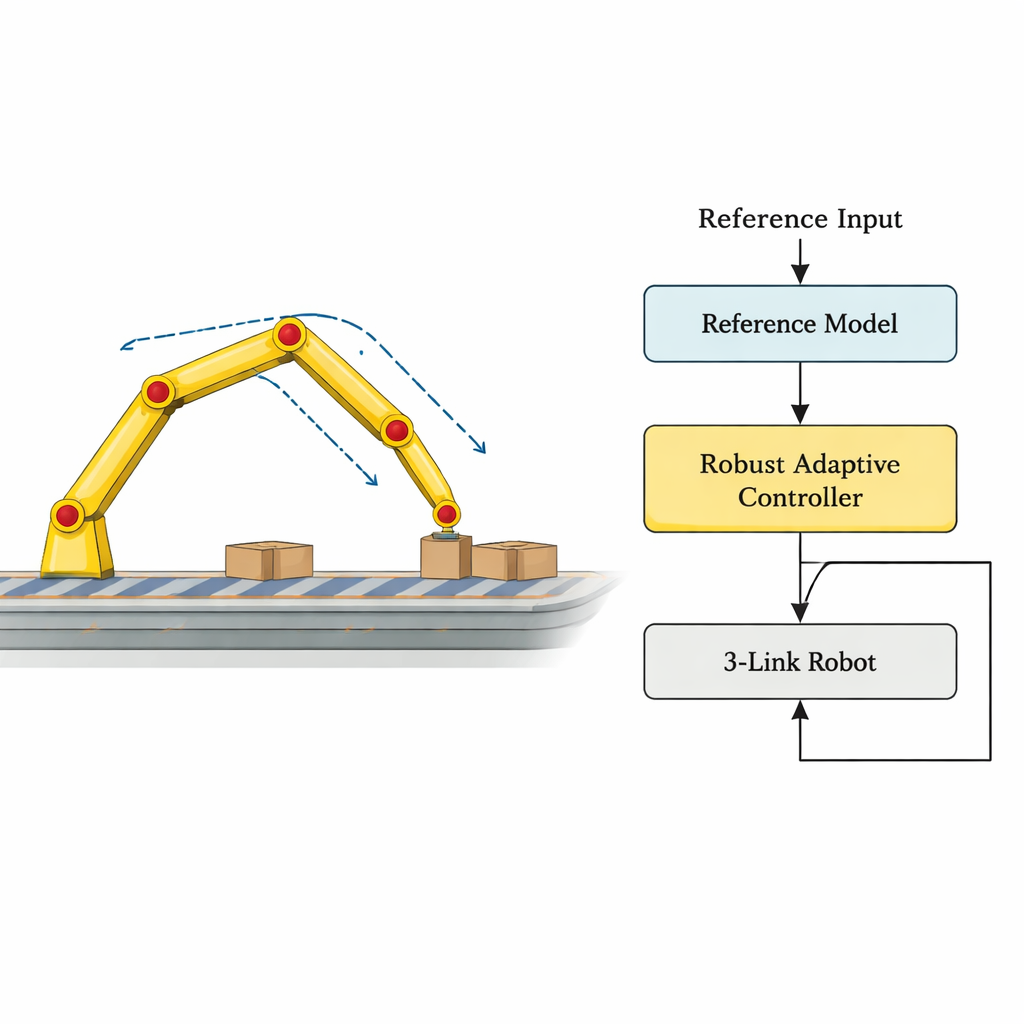
De robot leren een bewegend doel te volgen
Bovenop dit vereenvoudigde model bouwen de auteurs een modelreferentie-adaptieve regelaar (MRAC). Simpel gezegd definiëren ze eerst een ideaal gedrag—een referentiemodel dat aangeeft hoe elk gewricht in de tijd zou moeten bewegen bij een opdracht. De regelaar vergelijkt continu de werkelijke beweging van de robot met dit ideaal en past zijn interne versterkingen in realtime aan om het verschil te verkleinen. Onder perfecte omstandigheden kan conventionele MRAC de robot dicht bij het referentiemodel laten volgen, maar het heeft een ernstige zwakte: bij aanhoudende storingen of modelfouten kunnen de adaptieve versterkingen wegdrijven naar extreme waarden, wat leidt tot oscillaties, verspilde energie en zelfs verlies van stabiliteit. Dit fenomeen, parameterdrift genoemd, maakt gewone MRAC riskant voor praktisch industrieel gebruik.
Adaptatie robuust maken, niet roekeloos
Om deze drift te voorkomen ontwikkelt het artikel meerdere “robuuste” varianten van MRAC die expliciet rekening houden met onbekende effecten. De auteurs voegen extra termen toe aan de aanpassingswetten die de regelversterkingen zachtjes terugtrekken naar veilige grenzen of de adaptatie-inspanning schalen op basis van de grootte van de volgfout. Van de geteste strategieën—bekend als sigma-modificatie, fout-modificatie en een energie-bewuste optimaalregelingsmodificatie—steekt de laatste er met kop en schouders bovenuit. Door uitgebreide computersimulaties, inclusief snel oscillerende paden, pick-and-place-bewegingen, massawijzigingen van 50 procent, plotselinge ladingstoenames en sterke hoogfrequente storingen, houdt de robuuste MRAC de volgfout klein en de controlesignalen soepel. In scenario’s waar de interne versterkingen van conventionele MRAC onbeperkt groeien, houden de robuuste versies ze goed beheersbaar en blijft de beweging van de arm stabiel. 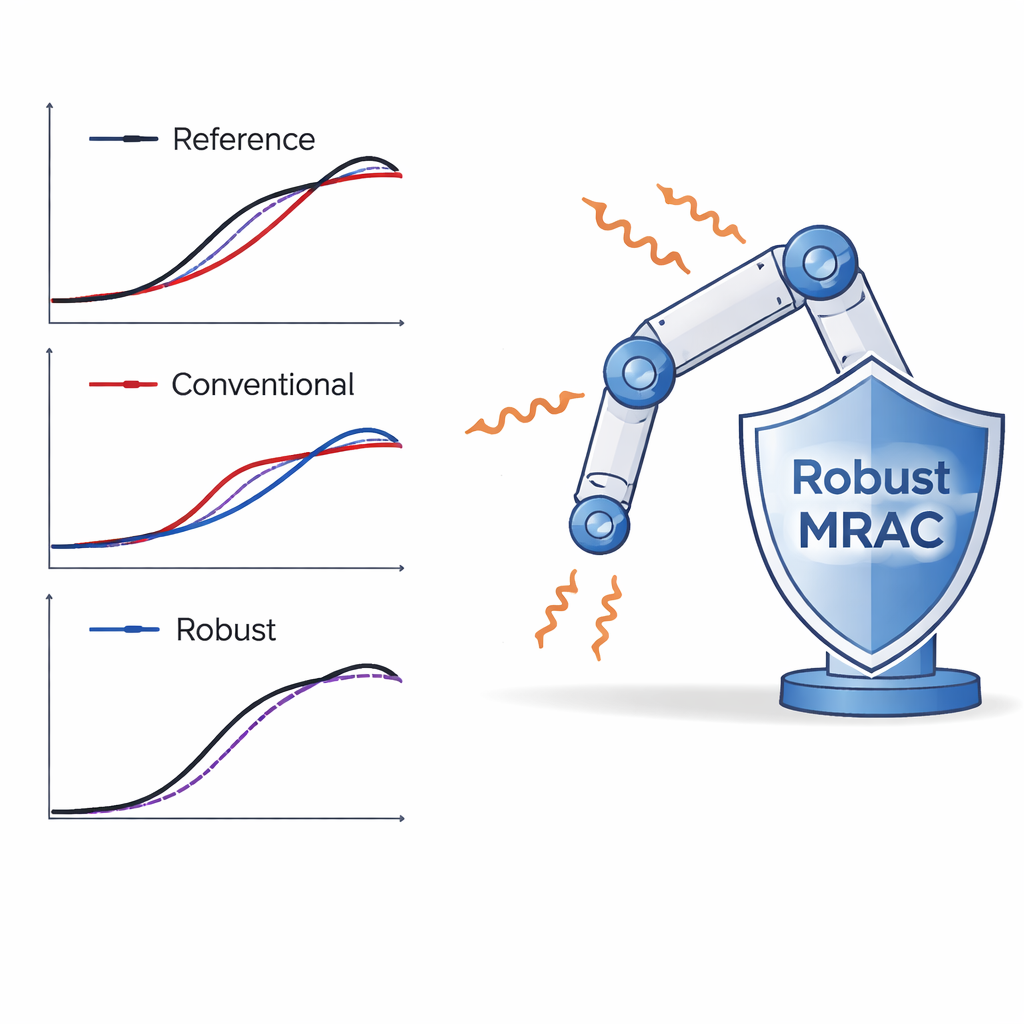
Wat dit betekent voor robots in de praktijk
Voor de niet-specialist is de conclusie dat dit werk een slim “autopiloot” biedt voor industriële robotarmen—een die blijft leren en aanpassen, maar niet instabiel wordt wanneer de omgeving of lading verandert. Door de complexe driedelige dynamiek op te splitsen in eenvoudigere delen en waarborgen aan het leerproces toe te voegen, laat de voorgestelde robuuste adaptieve regelaar de robot gewenste paden nauwkeurig volgen met redelijk motorvermogen, zelfs bij storingen en onzekerheid. Dit brengt praktische robotica een stap dichter bij echt plug-and-play-systemen die snel kunnen worden hergebruikt, onverwachte omstandigheden aankunnen en veilig naast mensen kunnen werken zonder voortdurend bijregelen door experts.
Bronvermelding: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Trefwoorden: besturing robotmanipulator, adaptieve regeling, industriële robotica, trajectvolging, robuuste regeling