Clear Sky Science · nl
Lokalisatie van groeipunten van planten via epoch-gebaseerde prior-annealing
Slimmere onkruidbestrijding voor een hongerige wereld
Nu de wereldbevolking groeit, staan boeren onder druk om meer voedsel te produceren met minder chemicaliën en met behoud van het milieu. Een grote uitdaging is onkruid verwijderen zonder waardevolle gewassen te schaden. Dit artikel presenteert een nieuwe kunstmatige-intelligentie (AI) trainingsstrategie die machines helpt precies te bepalen waar planten groeien — hun groeipunten — zodat gereedschappen zoals laser- of elektrische onkruidverdelgers onkruid met chirurgische precisie kunnen richten en gewassen onbeschadigd laten.
Waarom groeipunten ertoe doen
Onkruid steelt zonlicht, water en voedingsstoffen van gewassen, waardoor opbrengsten dalen en de voedselzekerheid onder druk komt te staan. Boeren vertrouwen vaak op herbiciden, maar overmatig gebruik leidt tot zorgen over gezondheid, vervuiling en resistente onkruiden. Nieuwe technieken zoals vlam-, elektrische- en laseronkruidbestrijding beloven schonere controle door planten mechanisch of met energiebundels te vernietigen. Om veilig te werken moeten deze systemen gewassen van onkruid onderscheiden en vervolgens de kleine groeipunten lokaliseren — vaak bij stengelverbindingen — waar schade het meest effectief is. Veel bestaande computer-vision hulpmiddelen kunnen hele planten detecteren, maar hebben moeite om deze kleine doelen nauwkeurig en snel genoeg te vinden voor realtime gebruik in het veld.
Van eenvoudige kleurclues naar krachtige aanwijzingen
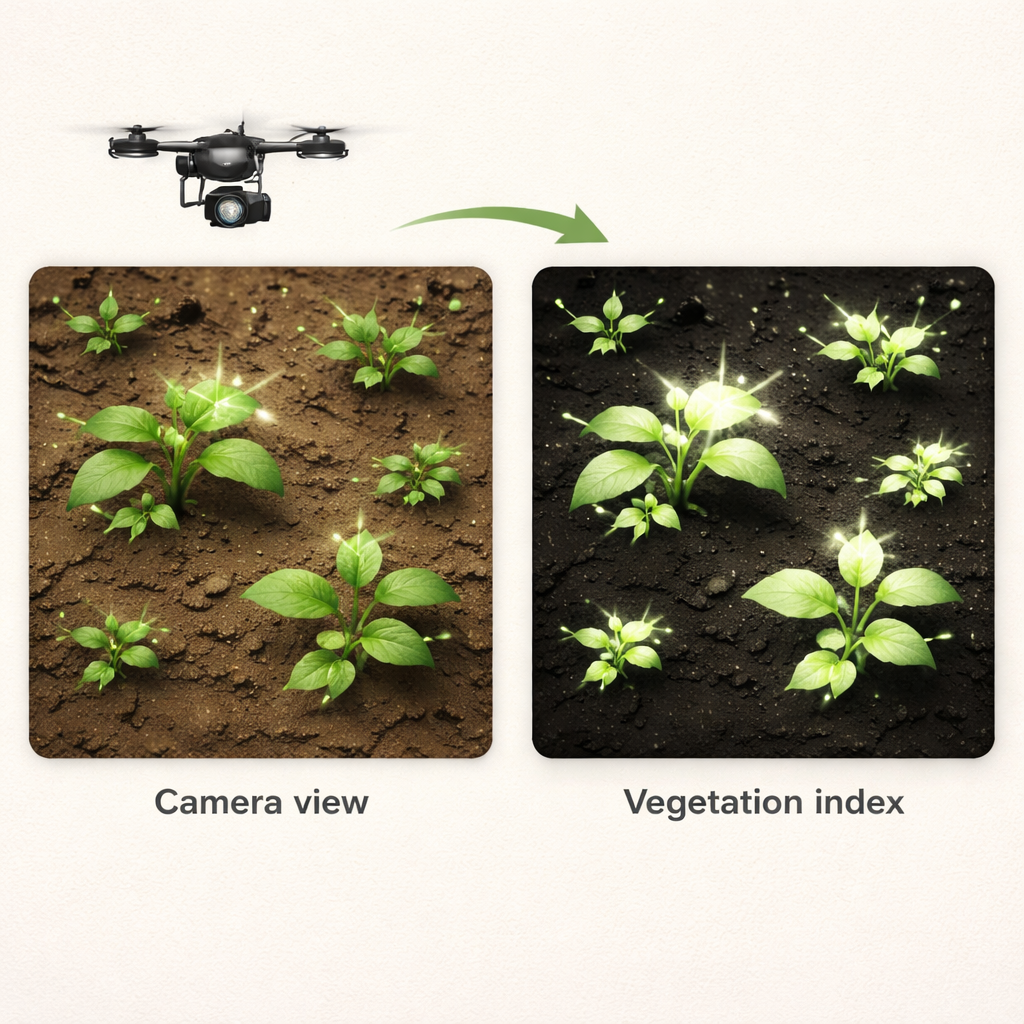
De onderzoekers bouwen voort op een eenvoudig idee: groene planten zien er anders uit dan bruin grond in gewone kleurenfoto’s. Een bekende kleurformule, het ExG-ExR vegetatie-index, combineert de rood-, groen- en blauwwaarden van elke pixel zodat plantpixels opvallen als helder en grondpixels donker lijken. Deze index kan worden berekend met elke standaardcamera zonder extra sensoren. In het nieuwe systeem wordt deze vegetatie-index toegevoegd aan de gebruikelijke drie kleurkanalen als vierde invoer voor een populaire AI-detector bekend als YOLO-Pose. Deze vierkanaalsweergave geeft het model een duidelijker beeld van waar planten zijn, waardoor het zich beter kan concentreren op de juiste gebieden bij het zoeken naar groeipunten.
AI leren van makkelijk naar moeilijk
Het simpelweg voorzien van extra informatie is niet genoeg; het model moet ook leren hoe het die informatie gebruikt. Het team introduceert een "epoch-gebaseerde prior-annealing" (EPA) strategie, geïnspireerd op hoe mensen leren. Vroeg in de training wordt het model sterk aangemoedigd om zijn voorspelde groeipunten binnen plantgebieden te houden, met gebruik van de vegetatie-index als richtlijn. Als het een punt in de grond plaatst, legt het trainingsalgoritme een zwaardere straf op; als het punt binnen plantpixels ligt, is de straf lichter. Naarmate de training vordert, wordt deze begeleiding geleidelijk afgebouwd volgens een vloeiend schema, waardoor het model minder op het grove kleur-signaal hoeft te vertrouwen en meer op de fijne visuele patronen die het heeft geleerd. Aan het einde wordt het AI-model niet langer naar de groenste pixels gedwongen — die mogelijk niet de echte groeipunten zijn — maar verfijnt het in plaats daarvan zelfstandig hun locaties.
Het idee bewijzen in echte velden
Om hun aanpak te testen, trainden de auteurs modellen op twee reële datasets met duizenden veldbeelden met meerdere gewassoorten en vele soorten onkruid. Ze vergeleken versies van het YOLO-Pose model met en zonder het extra vegetatiekanaal en de EPA-trainingsstrategie. Het toevoegen van de vegetatie-index alleen gaf bescheiden verbeteringen, maar de combinatie met EPA leidde tot duidelijke verbeteringen in de nauwkeurigheid van groeipunten — ongeveer 2,4 procentpunt in een standaard detectiescore — zonder het vermogen van het model om vakjes om hele planten te trekken te schaden. De extra rekencapaciteit was minimaal (minder dan een half procent van de totale kosten), waardoor de methode geschikt is voor middelenbeperkte landbouwrobots. Tests onder verschillende lichtomstandigheden, bodemvochtigheidsniveaus en zelfs verschillende YOLO-modelversies toonden aan dat de strategie breed toepasbaar is, hoewel enigszins gevoelig voor hoe sterk en hoe lang de prior-begeleiding wordt toegepast.
Wat dit betekent voor toekomstige landbouw
Voor niet-specialisten is de belangrijkste conclusie dat een kleine aanpassing in hoe we AI trainen — eerst gebruikmakend van een eenvoudige kleurgebaseerde aanwijzing en daarna geleidelijk het model zijn eigen conclusies laten trekken — machines veel beter kan maken in het vinden van de exacte plekken op planten waar actie effectief is. Deze verbetering in lokalisatie van groeipunten kan toekomstige onkruidrobots helpen elektrische pulsen of laserbundels precies op onkruid te richten terwijl gewassen worden gespaard, waardoor het gebruik van herbiciden en de impact op het milieu worden verminderd. Dezelfde strategie kan worden aangepast aan andere soorten plantensignalen en AI-modellen, en maakt de weg vrij voor slimere, betrouwbaardere vision-systemen die duurzame, hoog-precisie landbouw ondersteunen.
Bronvermelding: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
Trefwoorden: precisie-landbouw, onkruidbestrijding, computer vision, deep learning, groeipunten van planten