Clear Sky Science · nl
Explainable AI met EDA voor V2I-padverliesvoorspelling
Waarom slimmer auto-naar-weg verbindingen van belang zijn
Moderne auto’s communiceren steeds vaker met de weg om hen heen en zenden en ontvangen draadloze berichten naar verkeerslichten, wegkantapparatuur en andere infrastructuur. Deze verbindingen helpen bij veiligheidswaarschuwingen, verkeersmanagement en in de toekomst autonoom rijden. Maar stedelijke straten vormen rommelige draadloze omgevingen: hoge gebouwen, bomen, bruggen en vrachtwagens kunnen het signaal verzwakken of blokkeren. Dit artikel laat zien hoe je die signaalverzwakking kunt voorspellen op een manier die niet alleen nauwkeurig is, maar ook begrijpelijk voor ingenieurs en toezichthouders die deze systemen moeten vertrouwen.
De data zien voordat je het model vertrouwt
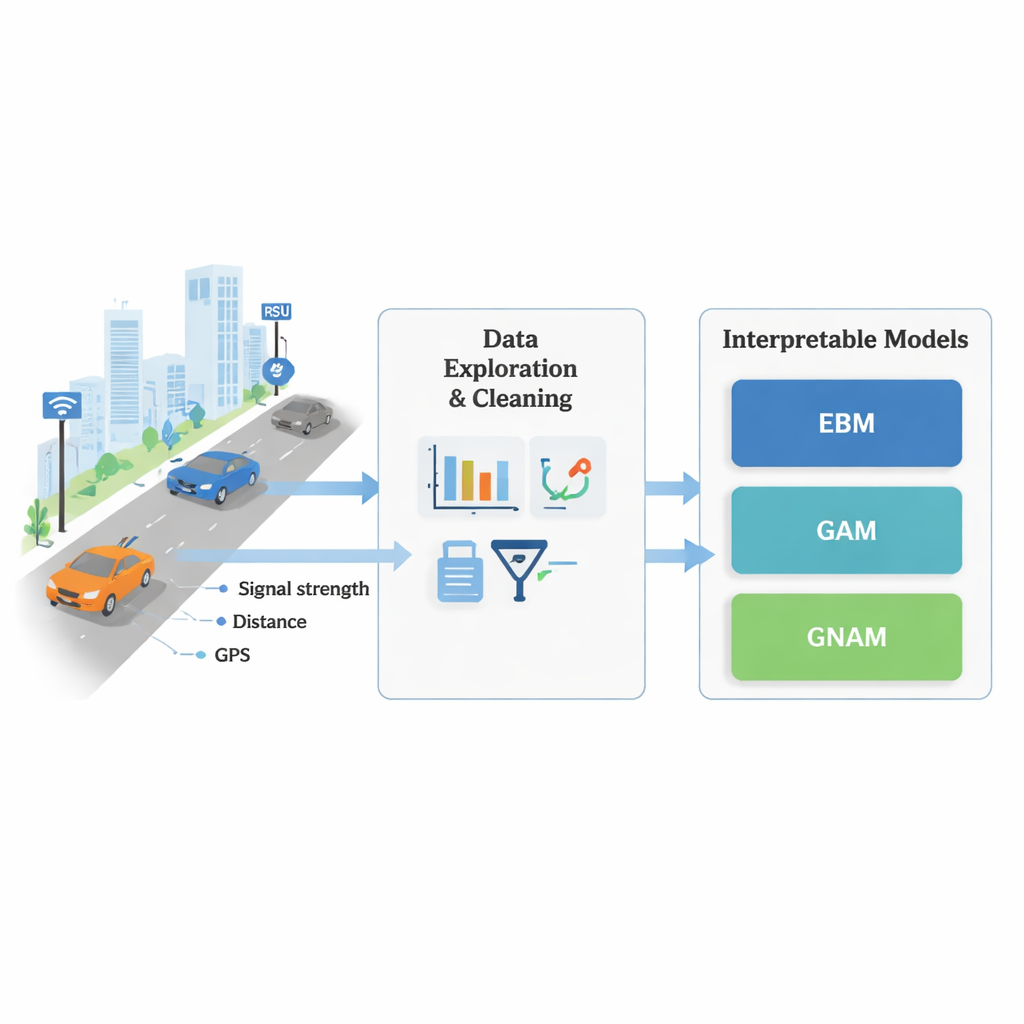
De auteurs vertrekken van een grootschalige meetcampagne in Bologna, Italië, waar auto’s met antennes door 24 verschillende stedelijke scènes reden — rechtdoor wegen, rotondes, laanbomen, bruggen en drukke verkeersgebieden — terwijl ze communiceerden met wegkantzenders. Uit deze metingen halen ze het “padverlies”, een maat voor hoeveel het signaal vervaagt tijdens de reis van weg naar auto. Voordat ze een voorspellend model bouwen, voeren ze grondige verkennende data-analyse uit: verdelingen plotten, correlaties controleren en de data opdelen in zeven representatieve casestudies zoals vrije zichtlijnen, geblokkeerde zichtlijnen en begroeiing. Deze stap onthult ruis, uitschieters en verborgen patronen die moeten worden aangepakt voor betrouwbare voorspellingen.
De chaos van echte draadloze data opschonen
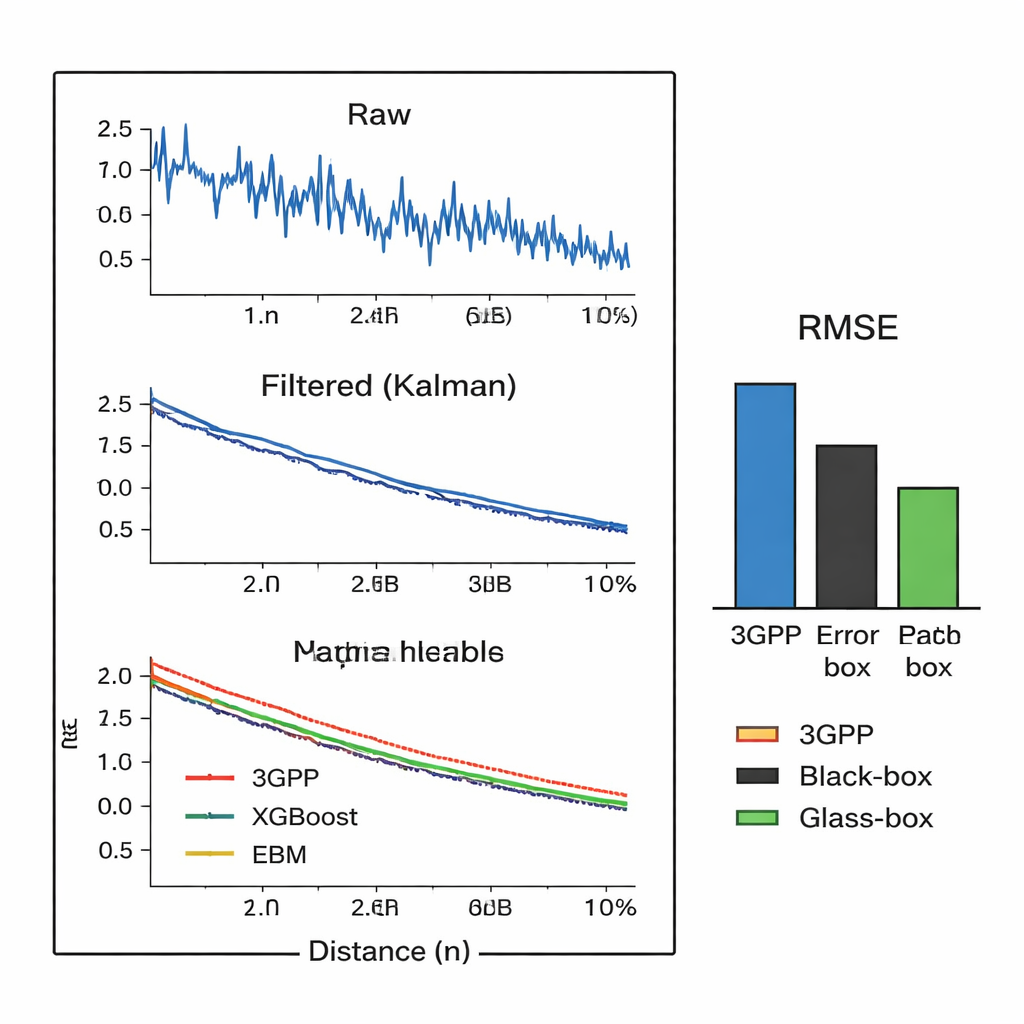
Data uit de echte wereld zijn vol onregelmatigheden door meetfouten, reflecties van gebouwen en plotselinge blokkades door passerende voertuigen. De onderzoekers ontwerpen een voorverwerkingspijplijn om deze chaos te temmen. Eerst schalen ze alle invoerkenmerken — zoals afstand, positie van de auto en snelheid — zodat ze vergelijkbaar zijn. Vervolgens verwijderen ze uitschieters met een robuuste statistische regel die extreme, inconsistente metingen wegtrimt. Ten slotte passen ze een geoptimaliseerde Kalman-filter toe, een klassiek hulpmiddel uit de regeltechniek, om het signaal over de afstand te verzachten terwijl onderliggende trends behouden blijven. Door de filterparameters zo af te stemmen dat de prestatie van downstream-modellen maximaal wordt, tonen ze aan dat dit reinigingsproces de voorspellingsfouten ruim kan halveren en stabiele patronen blootlegt waar modellen van kunnen leren.
De zwarte doos van AI openen
Traditionele formules voor draadloze planning, zoals de 3GPP- en dual-slope-modellen, zijn eenvoudig en transparant maar vangen vaak de complexiteit van dichte steden niet goed. Populaire machine-learningmethoden zoals random forests en XGBoost halen hoge nauwkeurigheid maar werken als zwarte dozen: ze geven voorspellingen zonder veel inzicht in het waarom. Dit artikel richt zich op een middenweg: “glas-doos” modellen die wiskundig eenvoudig genoeg blijven om te interpreteren, terwijl ze toch niet-lineair gedrag kunnen vastleggen. De auteurs testen drie dergelijke modellen — Explainable Boosting Machines, Generalized Additive Models en Generalized Neural Additive Models — naast standaard zwarte-doos-algoritmen en klassieke formules, met strikte train–test-splits en 5-fold crossvalidatie over alle scenario’s.
Wat zorgt voor signaalverlies op echte wegen
Door hun schoongemaakte data te combineren met interpreteerbare modellen kunnen de auteurs precies aanwijzen wat het meest telt voor padverlies in steden. De afstand tussen auto en wegkantenunit domineert, wat niet verrassend is, maar ook de precieze GPS-coördinaten van de auto en de tijd spelen een rol, wat weerspiegelt hoe straatindeling en verkeerspatronen het kanaal vormgeven. Voor complexe scènes — zoals NLOS-gebieden achter gebouwen, onder bruggen, door boomkronen of temidden van zware vrachtwagens — evenaren de glas-doos modellen de beste zwarte-doos-modellen qua nauwkeurigheid of blijven er iets bij achter, maar ze tonen duidelijk hoe elke factor de voorspelling omhoog of omlaag stuurt. De studie evalueert ook rekentijd en energiegebruik en concludeert dat deze interpreteerbare modellen snel en licht genoeg zijn voor realtime inzet in wegkantunits en boordapparatuur.
Veiligere, transparantere voertuignetwerken bouwen
Voor een niet-specialistische lezer is de kernboodschap dat we nu kunnen voorspellen hoe goed een auto de weg hoort in drukke steden met zowel precisie als helderheid. In plaats van te vertrouwen op ondoorzichtige AI die niemand volledig begrijpt, gebruikt dit raamwerk data-exploratie, ruisfiltering en verklaarbare modellen om bijna-toestand-van-de-kunst nauwkeurigheid te leveren en tegelijk precies te tonen welke factoren ertoe doen. Die transparantie is cruciaal voor veiligheid-kritische Vehicle-to-Everything-systemen, waarbij ingenieurs, toezichthouders en zelfs rechtbanken beslissingen moeten kunnen auditen. Het werk wijst de weg naar toekomstige 5G/6G auto-naar-weg netwerken die niet alleen snel en betrouwbaar zijn, maar ook verantwoordelijk en gemakkelijker te ontwerpen, testen en vertrouwen.
Bronvermelding: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
Trefwoorden: voertuig-naar-infrastructuur, padverliesvoorspelling, verklaarbare AI, draadloze kanalen, 5G V2X