Clear Sky Science · nl
Een methode voor extrinsieke LiDAR–camera‑kalibratie op lange afstand voor spoorvervoer
Treinen van veraf veilig houden
Moderne onbemande treinen vertrouwen op elektronische “ogen” om de sporen op obstakels te controleren, lang voordat een mens ze zou zien. Twee van de belangrijkste ogen zijn camera’s en laserscanners, LiDARs genoemd, die elk de wereld op verschillende manieren waarnemen. Om samen te werken, moeten ze zeer nauwkeurig uitgelijnd zijn — een taak die verrassend moeilijk wordt wanneer men sporen honderden meters verderop observeert. Deze studie presenteert een nieuwe manier om die sensoren uit te lijnen zodat ze betrouwbaar spoorsystemen op lange afstand kunnen beschermen.
Waarom sensoruitlijning ertoe doet
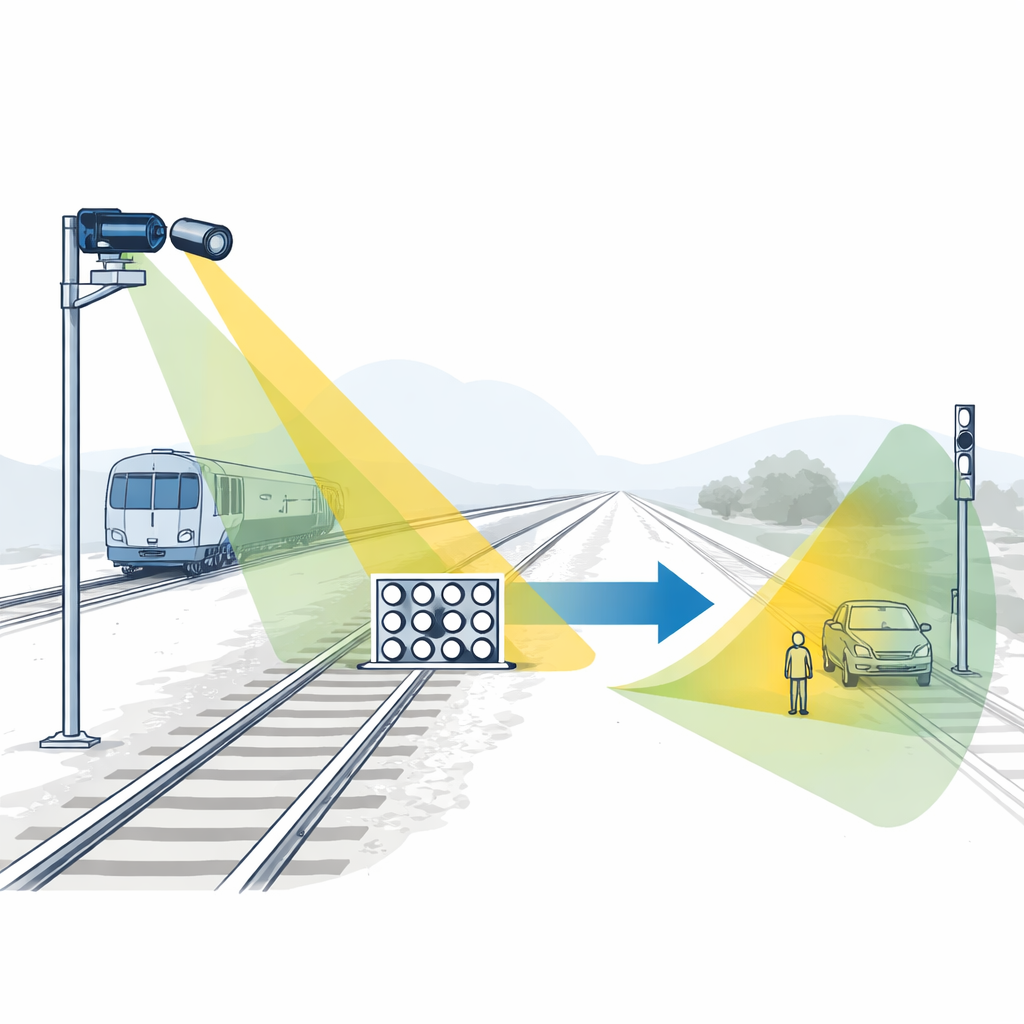
Op een autonome trein legt de camera gedetailleerde kleurbeelden vast, terwijl de LiDAR afstand meet door lichtpulsen uit te sturen en de terugkeer ervan te timen. Het samenvoegen van deze twee gezichtspunten stelt het systeem in staat objecten te detecteren en volgen die het spoor kunnen betreden, van een stilstaande auto bij een overgang tot puin op de rails. Fusie werkt echter alleen als het systeem precies weet hoe de camera en LiDAR ten opzichte van elkaar zijn geplaatst. Een kleine misalignering kan een gedetecteerd obstakel met vele centimeters — of zelfs meters — verschuiven op grote afstand, wat automatische beschermingssystemen trager of minder betrouwbaar kan maken.
De uitdaging van ver zicht op het spoor
Voor spoorapplicaties gebruiken ingenieurs vaak telelenzen zodat de camera objecten honderden meters verderop duidelijk kan zien. Op die afstanden worden de LiDAR‑terugkeerpunten van een kalibratiedoel echter erg schaars: slechts een paar laserpunten vallen op de plaat die gebruikt wordt om de sensoren uit te lijnen. De meeste bestaande uitlijntechnieken veronderstellen een dicht LiDAR‑puntenwolk of rijke randen in de scène — voorwaarden die simpelweg niet gelden op lange afstand. Daardoor wordt het moeilijk om overeenkomende kenmerken tussen de 2D‑afbeelding en de 3D‑puntenwolk met genoeg nauwkeurigheid te vinden voor veilig treinsignalering.
Een slimmer kalibratiebord
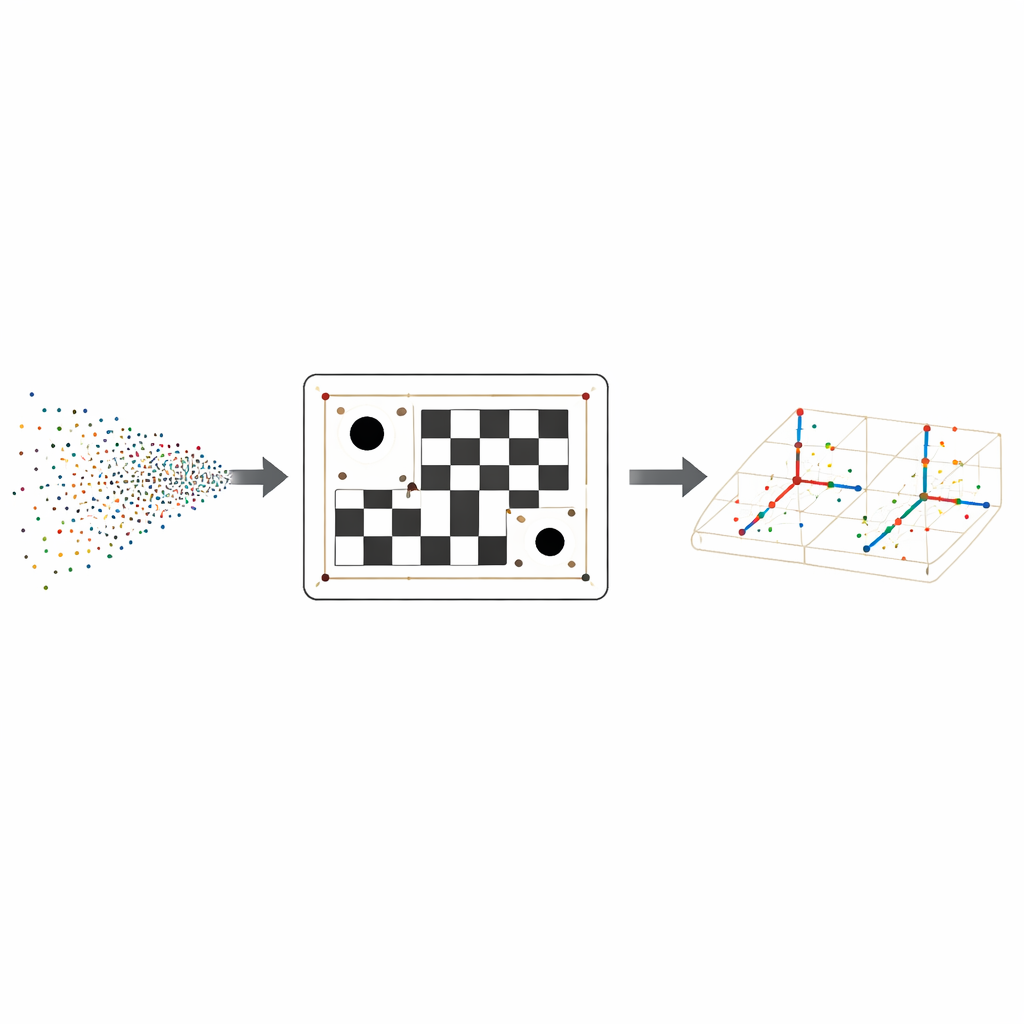
Om dit te overwinnen ontwerpen de auteurs een speciaal kalibratiebord dat een bekend zwart‑wit schaakpatroon combineert met drie ronde gaten waarvan de middens een onregelmatige driehoek vormen. Het schaakpatroon levert veel precieze hoekpunten in het camerabeeld, terwijl de gaten sterke geometrische aanwijzingen voor de LiDAR creëren, die zelfs van veraf gemakkelijk hun ronde randen kan detecteren. Doordat de drie gaten in een asymmetrische driehoek geplaatst zijn, kan de oriëntatie van het bord in de ruimte eenduidig worden bepaald, waardoor verwarring door gespiegeld of geroteerd zicht wordt vermeden.
Schaarse stippen omzetten in betrouwbare matches
Aan de LiDAR‑zijde maakt de methode eerst de puntenwolk schoon en past een vlak aan dat het bord representeert. Vervolgens projecteert zij de punten op dit vlak en gebruikt een robuuste cirkelpassing om het midden van elk gat te vinden, en verfijnt die posities door de bekende fysieke afstanden tussen de gaten af te dwingen. Met de driehoek van gatenmiddens vastgesteld, bouwt het algoritme een lokaal coördinatennetwerk over het bord, voorspelt waar elk schaakhoekpunt in 3D zou moeten liggen en controleert nabijgelegen LiDAR‑punten op de juiste helderheids‑, oftewel reflectiviteitswaarden. Deze combinatie van geometrie en reflectiviteit verandert een handvol verspreide terugkeerpunten in een betrouwbare set 3D‑hoeklocaties die overeenkomen met de 2D‑hoeken in de camera.
De sensorrelatie fijn afstemmen
Zodra dezelfde fysieke hoeken in zowel het camerabeeld als de LiDAR‑wolk zijn geïdentificeerd, lossen de auteurs de exacte rotatie en translatie op die de twee sensoren met elkaar verbinden. Ze gebruiken een iteratieve optimalisatietechniek die deze relatie herhaaldelijk aanpast om de kloof te verkleinen tussen waar LiDAR‑punten in het beeld projecteren en waar de camera daadwerkelijk de hoeken ziet. Tests op een echt spoorplatform, met verschillende cameralenzen van matig tot sterke telefoto, tonen aan dat de nieuwe methode de projectiefouten consequent tot ongeveer één pixel of minder beperkt, en dat ze meerdere bekende alternatieven overtreft, vooral bij de langste brandpuntsafstanden waar de data het schaarsst zijn.
Wat dit betekent voor spoorveiligheid
Simpel gezegd biedt de studie een betrouwbaardere manier om camera en LiDAR op een autonome trein te vertellen: “jullie bevinden je hier en kijken precies in deze richting.” Door het kalibratiebord te herontwerpen en slimme verwerking van schaarse LiDAR‑data toe te voegen, behoudt de methode hoge nauwkeurigheid zelfs wanneer de sensoren scènes honderden meters ver observeren. Deze strakkere uitlijning stelt het gefuseerde systeem in staat obstakels nauwkeuriger in 3D‑ruimte te plaatsen, wat de technologische basis versterkt voor veiliger spoorvervoer en betrouwbaardere multi‑sensorgewaarwording in de praktijk.
Bronvermelding: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
Trefwoorden: veiligheid spoorvervoer, LiDAR‑camerafusie, sensorcalibratie, autonome treinen, waarneming op lange afstand