Clear Sky Science · nl
Een open benchmarkdataset voor machine learning en intelligente trajectoptimalisatie in vastevleugel onbemande luchtvaartuigen
Waarom slimere dronevluchten ertoe doen
Van gewasinspecties tot zoek‑en‑reddingsoperaties: vastevleugel‑drones verrichten stilletjes een groeiend aantal taken hoog boven ons. Deze vliegtuigen betrouwbaarder maken en onafhankelijker van menselijke piloten kan veiliger bezorging mogelijk maken, scherper milieutoezicht opleveren en de veerkracht van operaties in noodsituaties of conflictgebieden vergroten. De vooruitgang wordt echter steeds vaker beperkt niet door gebrek aan slimme ideeën, maar door een tekort aan realistische data. Dit artikel introduceert een nieuwe open dataset van honderden autonome dronevluchten, ontworpen zodat ingenieurs en studenten overal ter wereld betere vluchtalgoritmen kunnen ontwikkelen en testen op eenzelfde rijke, gedeelde basis.
Een vliegend laboratorium voor missies in de echte wereld
De auteurs maakten hun dataset met behulp van een robuust motorzwever‑achtig vliegtuig, de Volantex Ranger 2400. Met een vleugelspanwijdte van tweeënhalve meter, een efficiënte vleugelvorm en een ruime romp kan het vliegtuig moderne elektronica meevoeren en lange, stabiele missies uitvoeren. Het wordt aangedreven door een achterop gemonteerde elektromotor en een aangepaste lithium‑ionaccu die is afgestemd op uithoudingsvermogen in plaats van korte vermogenspieken. Het team vloog met dit platform volledig autonoom en gebruikte vooraf geplande routes die cruciale vluchtfases omvatten: start, rechte kruisslagen, krappe bochten, dynamische manoeuvres en automatische landingen. Deze gecontroleerde maar realistische opzet verandert de Ranger in een vliegend laboratorium dat zich gedraagt als kleine operationele drones gebruikt in civiele en defensietoepassingen.
Twee breinen, één vliegtuig
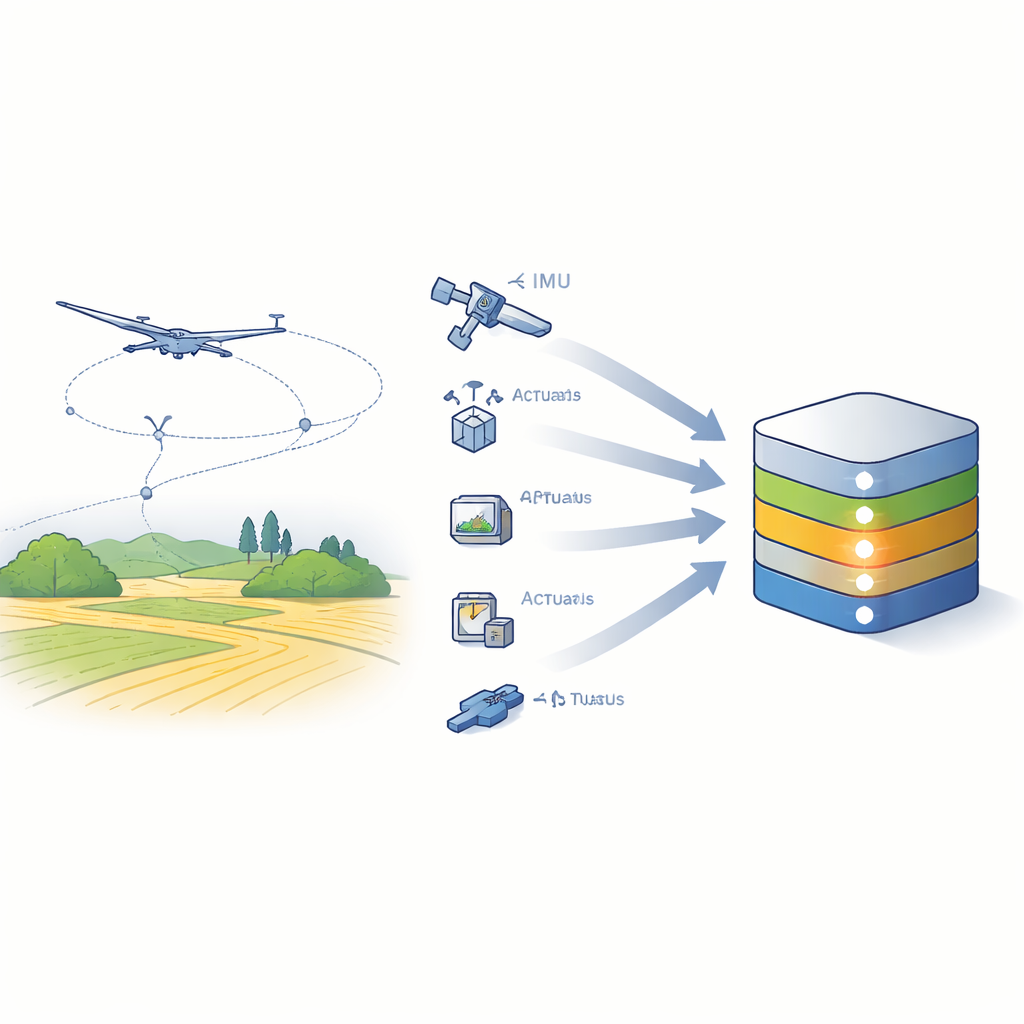
Om een breed scala aan gebruiksscenario’s vast te leggen, voorzagen de onderzoekers hetzelfde vliegende platform van twee heel verschillende “breinen.” Eén configuratie gebruikt een compact, goedkoop SpeedyBee F405‑vluchtcontroller, overeenkomend met de elektronica die hobbyisten op een zelfgebouwde drone zouden zetten. De andere combineert een professionele Pixhawk 6X‑autopilot met een krachtige Jetson Orin NX‑computer, in staat om veeleisende kunstmatige‑intelligentie‑software aan boord te draaien. Beide systemen loggen gedetailleerde telemetrie, waaronder bewegingen van traagheidssensoren, GPS‑positie en snelheid, hoogte, luchtsnelheid, commando’s naar bestuurbare oppervlakken, batterijstatus en vluchtmodus, met een frequentie die hoog genoeg is om de beweging van het vliegtuig fijnmazig te reconstrueren. Door hetzelfde luchtframe te behouden en alleen de elektronica te wisselen, stelt de dataset onderzoekers in staat te bestuderen hoe verschillende niveaus van aan boord rekenen en waarnemen het vluchtgedrag beïnvloeden.
Wat er in de dataset zit
De resulterende IDF‑DS‑verzameling bestaat uit 240 autonome vluchten, ongeveer 32 uur vliegtijd en tientallen miljoenen opgenomen monsters. Elke vlucht is opgeslagen met een consistente mappenstructuur zodat gebruikers snel het hoofdlogbestand, het missieplan, controllerinstellingen en een direct te bekijken GPS‑spoor kunnen vinden. Eén familie van missies volgt een zigzagpatroon boven een rechthoekig veld, ideaal voor herhaalbare vergelijkingen of het trainen van voorspellende modellen. Een andere volgt een ovaalvormige ’racebaan’ geïnspireerd op een bekende MotoGP‑circuitlay‑out, met scherpe bochten, vloeiende krommen en rechte segmenten die de autopilot uitdagen. Voor elke configuratie en missie leggen de logs vast hoe het vliegtuig werkelijk vloog, niet alleen hoe het geacht werd te vliegen.
Ruwe vluchten vertalen naar inzichten
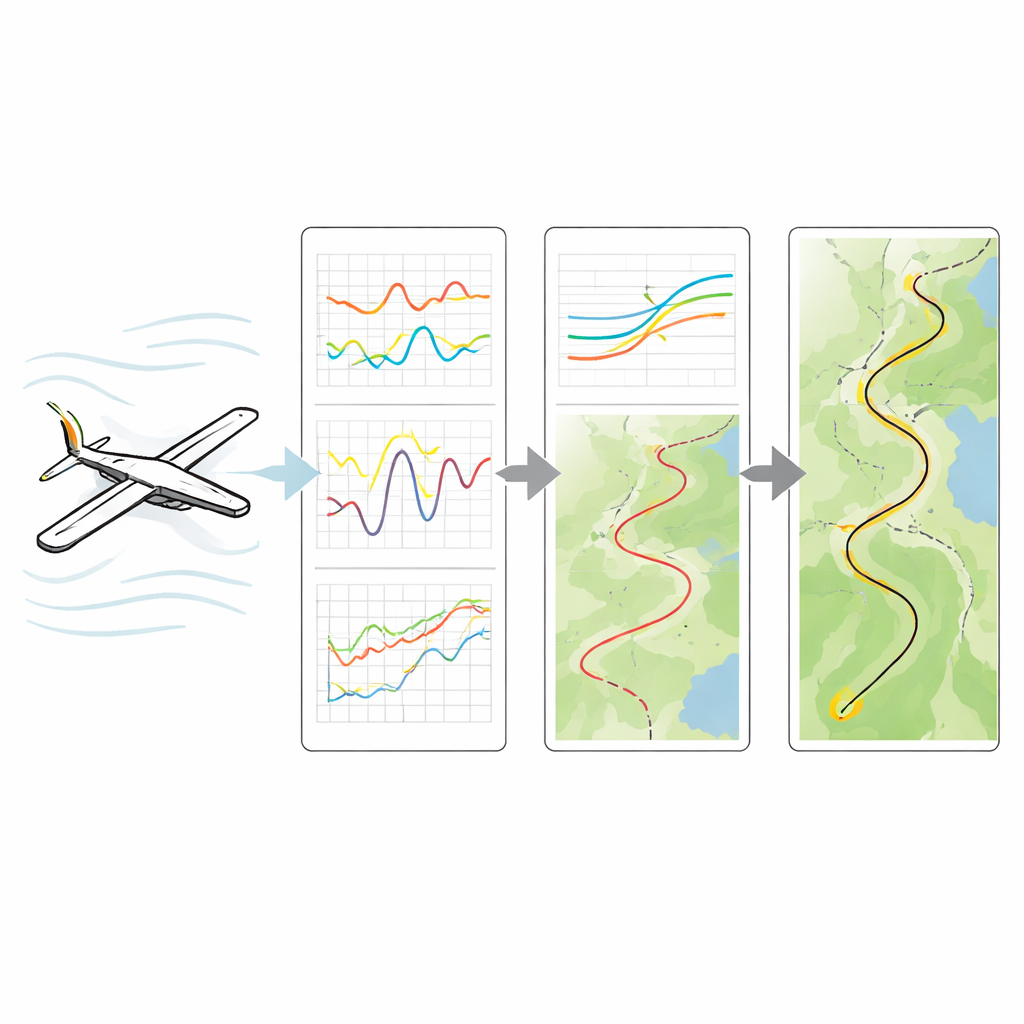
Om te laten zien wat met deze rijkdom mogelijk is, lopen de auteurs verschillende voorbeeldanalyses door. Ze controleren de kwaliteit van de aan boord aanwezige bewegingssensoren door deze te vergelijken met versnellingen en rotaties afgeleid uit het GPS‑gebaseerde traject, waarmee ze bevestigen dat de metingen betrouwbaar genoeg zijn om als „ground truth” te dienen voor het trainen van modellen. Ze bestuderen hoe goed de autopilot snelheid in drie richtingen schat, hoe nauwkeurig het vliegtuig zijn geplande pad volgt en hoeveel elektrische stroom het verbruikt tijdens klimmen, bochten en constante kruissnelheid. Door luchtsnelheid, grondsnelheid en houding te combineren reconstrueren ze zelfs de wind die het toestel onderweg ervoer, waarmee een beeld van windstoten en dwarswind ontstaat puur uit aan boord gemeten gegevens. Een ander gebruiksscenario schetst hoe dezelfde datastromen een AI‑model kunnen trainen om positie te schatten wanneer satellietnavigatie niet beschikbaar is.
Hoe deze bron toekomstige vluchten helpt
In alledaagse termen gaat dit werk over het geven van een gedeelde „zwarte doos” van honderden vluchten die iedereen kan openen. In plaats van dat elk team zijn eigen dure testdata moet verzamelen en privé houdt, kunnen onderzoekers en studenten deze open dataset downloaden en meteen beginnen nieuwe manieren te verkennen om drones op koers te houden wanneer GPS uitvalt, fouten te detecteren voordat ze gevaarlijk worden, of de batterijduur te verlengen door energiezuinigere routes te kiezen. Het artikel zelf bouwt deze slimme systemen niet; het legt de fundering die ze nodig hebben. Voor lezers is de kernboodschap dat vooruitgang in luchtautonomie nu evenzeer afhangt van open, zorgvuldig gedocumenteerde vluchtgegevens als van slimme algoritmen — en dat deze dataset een substantiële stap in die richting is.
Bronvermelding: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Trefwoorden: vastevleugel drones, vluchttelemetrie, autonome navigatie, machine-learning dataset, trajectoptimalisatie