Clear Sky Science · nl
SPICE-HL3: Enkel-foton-, Inertiële- en Stereo-camera dataset voor het verkennen van hoge-latitude maanlandschappen
Waarom maanschaduwen belangrijk zijn voor robots
Toekomstige missies naar de poolgebieden van de Maan hopen bevroren water en andere hulpbronnen aan te boren, maar deze gebieden behoren ook tot de visueel meest verwarrende plekken in het zonnestelsel. Lange, bewegende schaduwen, verblindende schittering en vrijwel totale duisternis kunnen de camera’s van een robot gemakkelijk misleiden. Dit artikel introduceert SPICE‑HL3, een nieuwe open dataset die is gemaakt in een binnenomgeving als een ‘stuk van de Maan’ en waarmee wetenschappers wereldwijd kunnen testen hoe robots zien en navigeren onder deze harde poolomstandigheden, onder andere met een geavanceerde enkel-fotoncamera die letterlijk in het donker kan zien.
Een stukje van de maanpolen op aarde bouwen
Aangezien echte gegevens van de maanpolen schaars en duur zijn om te verkrijgen, bouwde het team een gecontroleerde testopstelling genaamd LunaLab aan de Universiteit van Luxemburg. Het is een binnenlandschap van 11 bij 8 meter, gevuld met grof basaltgrind, rotsen en kraters, omringd door zwarte wanden en plafonds om het lichtabsorberende, luchtloze milieu van de Maan na te bootsen. Een krachtige, beweegbare schijnwerper bootst de Zon na die laag aan de horizon staat, wat lange, scherpe schaduwen en enorme helderheidsverschillen tussen zonbeschenen hellingen en pikzwarte kraterinterieurs oplevert. Door de positie en output van de lamp te variëren, reproduceerden de onderzoekers vier verschillende lichtregimes—referentie, middag, dageraad/avondschemer en nacht—vergelijkbaar met wat een rover zou ervaren gedurende een volledige maanperiode nabij de polen. 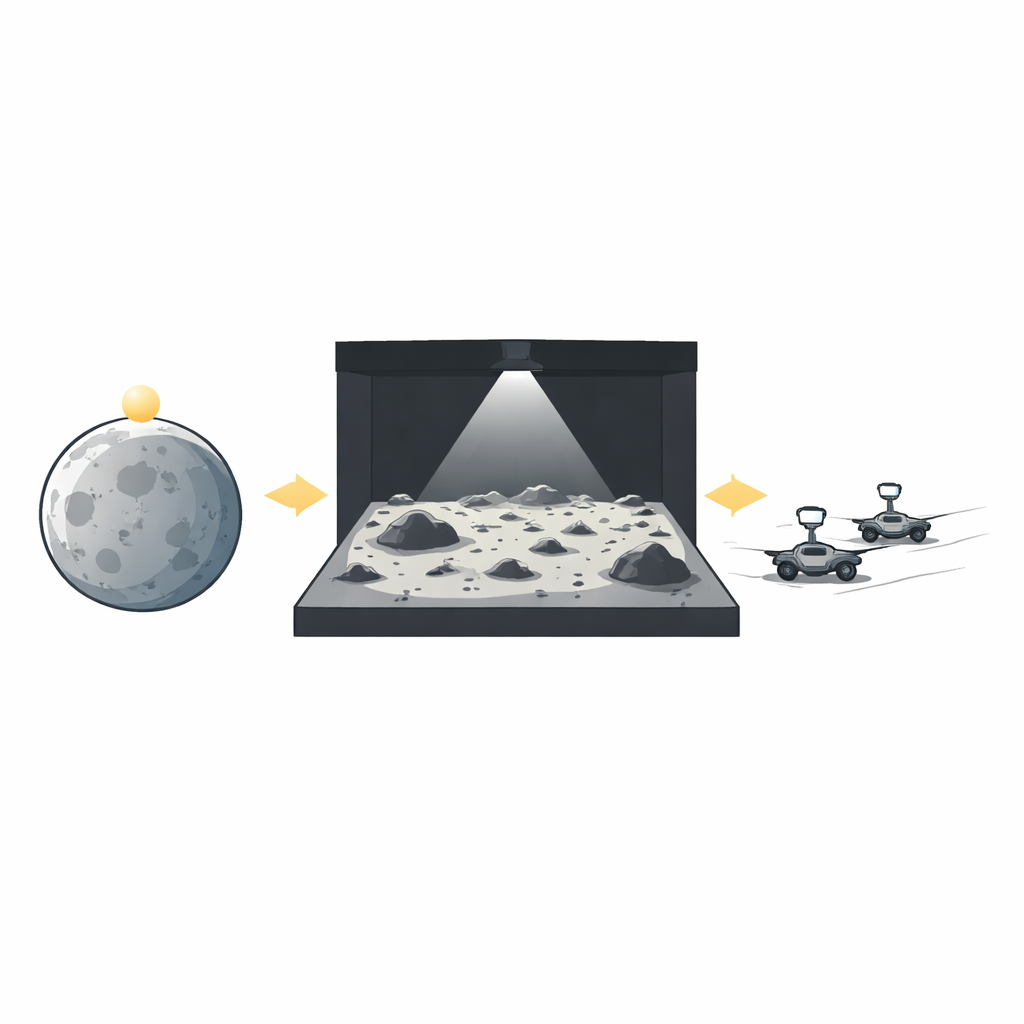
Rovers, sensoren en een camera die individuele fotonen telt
De dataset is verzameld met twee kleine wielenrovers die verschillende combinaties van camera’s en bewegingssensoren droegen. Eén rover droeg een conventionele monochrome camera en een nieuwe enkel-foton avalanche diode (SPAD) camera; de andere had een stereo kleur‑plus‑dieptecamera met een ingebouwde bewegingssensor. Beide rovers logden wielrotatie en inertiële gegevens, terwijl een overhead motion-capture systeem hun werkelijke posities met submillimeter-nauwkeurigheid bijhield. De SPAD-camera is de opvallende technologie: in plaats van licht als een vloeiende intensiteitswaarde te meten, rapporteert elke pixel of hij individuele fotonen detecteerde, met extreem hoge snelheid en gevoeligheid. Door veel van deze ultra‑snelle binaire snapshots te combineren, kan het systeem beelden reconstrueren die details behouden, zelfs in zeer schemerige of extreem hoogcontrastscènes waar gewone camera’s vaak vervagen of overbelichten.
Het vastleggen van maanachtige ritten in vele varianten
Om onderzoekers een rijke testomgeving te bieden, ontwierpen de auteurs zeven typen roverpaden, van lange, stop‑and‑go doorkruisingen die voorzichtig planetair rijden imiteren tot korte, continue ritten in verschillende richtingen ten opzichte van de kunstmatige Zon (erheen, ervandaan en zijwaarts) en krappe draaiingen ter plaatse. Ze herhaalden deze paden met langzaam wandeltempo en tienmaal snellere runs, onder meerdere lichtomstandigheden, soms met roverkoplampen aan en soms uit. In totaal bevat SPICE‑HL3 88 tijdgesynchroniseerde sequenties, bijna 1,3 miljoen beelden en bijbehorende bewegings- en grondwaarheidsgegevens. De beelden omvatten statische scènes die ideaal zijn voor zorgvuldige analyse en snelle reeksen die bewegingsonscherpte en belichtingsregeling op de proef stellen. Alles is verpakt in een duidelijk georganiseerde bestandsstructuur, met calibratiebestanden die precies beschrijven hoe elke camera en sensor is georiënteerd en hoe hun klokken in de tijd zijn uitgelijnd.
Enkel-fotonvisie aan de tand voelen
Naast het vrijgeven van de data controleerde het team de kwaliteit en bruikbaarheid van de opgenomen beelden. Ze vergeleken hoe de SPAD, de monochrome camera en de stereo camera enkele van de lastigste visuele situaties aanpakkten: schemer‑ en nachtritten en runs waarbij de rover rechtstreeks in de ‘Zon’ keek. Met eenvoudige beeldkwaliteitsmaten en visuele inspectie vonden ze dat de enkel‑fotoncamera consequent structuren behield in zowel heldere als beschaduwde gebieden, een breed dynamisch bereik van helderheden handhaafde en stabiel bleef onder uiteenlopende omstandigheden. Conventionele camera’s presteerden goed wanneer de scène goed verlicht was, maar verloren detail in zeer donkere gebieden of bliezen hooglichten nabij de lichtbron uit. De auteurs verifieerden ook dat gangbare mapping‑ en lokalisatiesoftware de dataset succesvol kon verwerken, wat bevestigt dat tijdstempels, calibraties en formaten robuust genoeg zijn voor echt robotics-onderzoek. 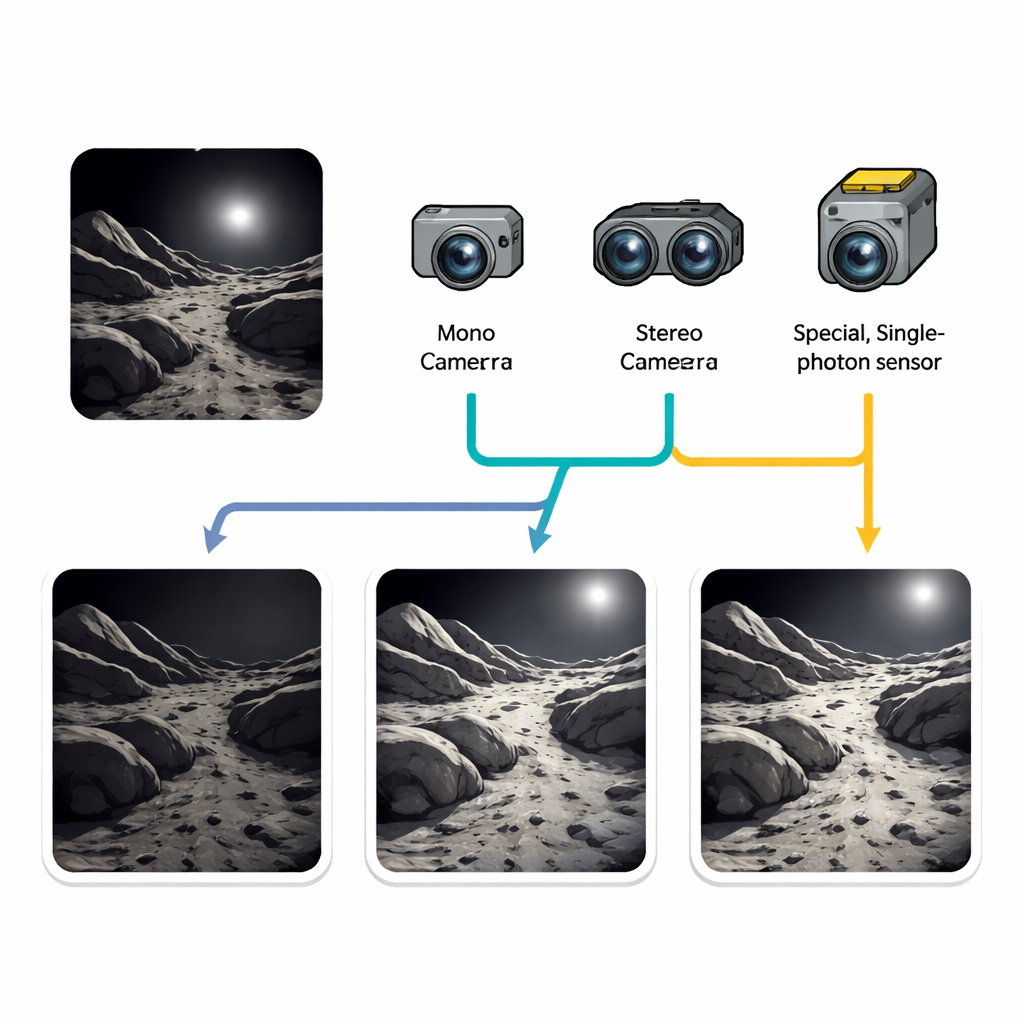
Beperkingen, kanttekeningen en waarom dit ertoe doet
Hoewel LunaLab niet perfect de fijne stofdeeltjes en subtiele lichtverstrooiingseffecten van werkelijk maanoppervlak kan reproduceren, en enige ongewenste infrarode gloed van het motion-capture systeem in de donkerste scènes sijpelde, betogen de auteurs dat SPICE‑HL3 nog steeds een veeleisende ‘worst‑case’ optische omgeving voor rover‑visie vertegenwoordigt. Voor ingenieurs en wetenschappers die missies naar de maanpolen voorbereiden—of robots ontwerpen voor welke schemerige, hoog‑contrast omgeving dan ook—biedt de dataset een zeldzame, publiek beschikbare benchmark. Het maakt het mogelijk nieuwe cameratopologieën zoals SPAD‑sensoren eerlijk te vergelijken met traditionele systemen, navigatie‑ en mappingalgoritmen te verbeteren en uiteindelijk bij te dragen aan de zekerheid dat toekomstige rovers veilig kunnen blijven bewegen door de wisselende schaduwen van de Maan in plaats van strandend in het donker te raken.
Bronvermelding: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Trefwoorden: maanrobotica, planetaire navigatie, enkel-fotonbeeldvorming, robotvisie-datasets, extreme verlichting