Clear Sky Science · nl
Schaalbare in-situ fabricage van multimodale elektronische huid voor intelligente robotica en interactieve systemen
Robots en speelgoed een gevoel van aanraking geven
Stel je een robot voor die een warme snee toast voorzichtig kan oppakken zonder hem te verpletteren of je hand te verbranden, of een knuffel die anders reageert als je hem omhelst, aan zijn oor trekt of verwarmt met je handpalm. Dit onderzoek beschrijft een nieuw type “elektronische huid” dat deze ideeën dichter bij de realiteit brengt door machines een rijker, meer mensachtig gevoel van aanraking en nabijheid te geven.
Waarom machines beter moeten kunnen voelen
De huidige robots en apparaten zijn nog onhandig bij het omgaan met de echte wereld. Veel systemen kunnen slechts één grootheid waarnemen, zoals druk, en vertrouwen vaak op omvangrijke, handmatig samengestelde onderdelen die moeilijk op te schalen zijn. Menselijke huid integreert echter voortdurend meerdere signalen tegelijk: zachte aanraking, stevige druk, rek, warmte en zelfs een gevoel van hoe dichtbij objecten zijn voordat er contact is. De auteurs van deze studie wilden een elektronische variant van huid bouwen die meerdere van deze gewaarwordingen tegelijk kan vastleggen, terwijl hij dun, flexibel en eenvoudig aanpasbaar blijft voor verschillende taken.
Het bouwen van een dun, flexibel gevoel voor aanraking
Het team ontwikkelde een laagprofiel "e-huid" met een cleanroom-vrij proces dat schaalbaar en snel aanpasbaar is. Centraal staat een flexibele koperen printbaan gepatenteerd met ultraviolet laserpatroon, die functioneert als bedrading op een printplaat maar kan buigen en rond krommen worden gewikkeld. Bovenop en onder deze print werden zachte siliconenlagen met kleine luchtholtes aangebracht, vergelijkbaar met een spons. De buitenoppervlakken zijn gecoat met een dunne laag koolstofnanobuisjes, die een geleidende schaal vormen die het apparaat beschermt tegen elektrische ruis en dienstdoet als gemeenschappelijke referentielaag voor sensoren. Deze opbouw laat elk sensorpad werken als een kleine elektrische condensator waarvan de waarde verschuift wanneer het materiaal wordt ingedrukt, gebogen, verwarmd of in de nabijheid van een object komt. Extra kleine chips op dezelfde flexibele print meten temperatuur en afstand zonder contact, waardoor het hele vel niet alleen druk- en rekreceptoren van huid nabootst, maar ook een gevoel van warmte en nabij zicht. 
Hoe de sensoren druk en beweging waarnemen
De druk- en buigcomponenten van de e-huid zijn ontworpen om sterk te reageren op kleine veranderingen en tegelijk duurzaam te blijven. Wanneer er op iets wordt gedrukt, comprimeren de poriën in de zachte laag, waardoor de interne metalen lagen dichter bij elkaar komen te liggen en lucht door meer siliconen wordt vervangen. Beide effecten verhogen het elektrische signaal, vooral bij lage drukken waar het materiaal het makkelijkst is in te knijpen. Tests toonden aan dat de e-huid zeer zachte aanrakingen kan detecteren, tot enkele tientallen pascal, met snelle respons en weinig drift zelfs na tienduizend druk- en loslaatcycli. Wanneer het vel buigt, vouwt het om de binnenbedrading en verkleint opnieuw de opening tussen lagen aan één zijde, wat het signaal versterkt. De respons wordt duidelijker bij grotere buighoeken, wat overeenkomt met hoe echte buigingen geneigd zijn te concentreren in één gebied in plaats van gelijkmatig te verspreiden. Over het geheel genomen balanceert het ontwerp zachtheid, stabiliteit en gevoeligheid zonder de complexe gelaagde structuren die in veel eerdere apparaten zijn gebruikt. 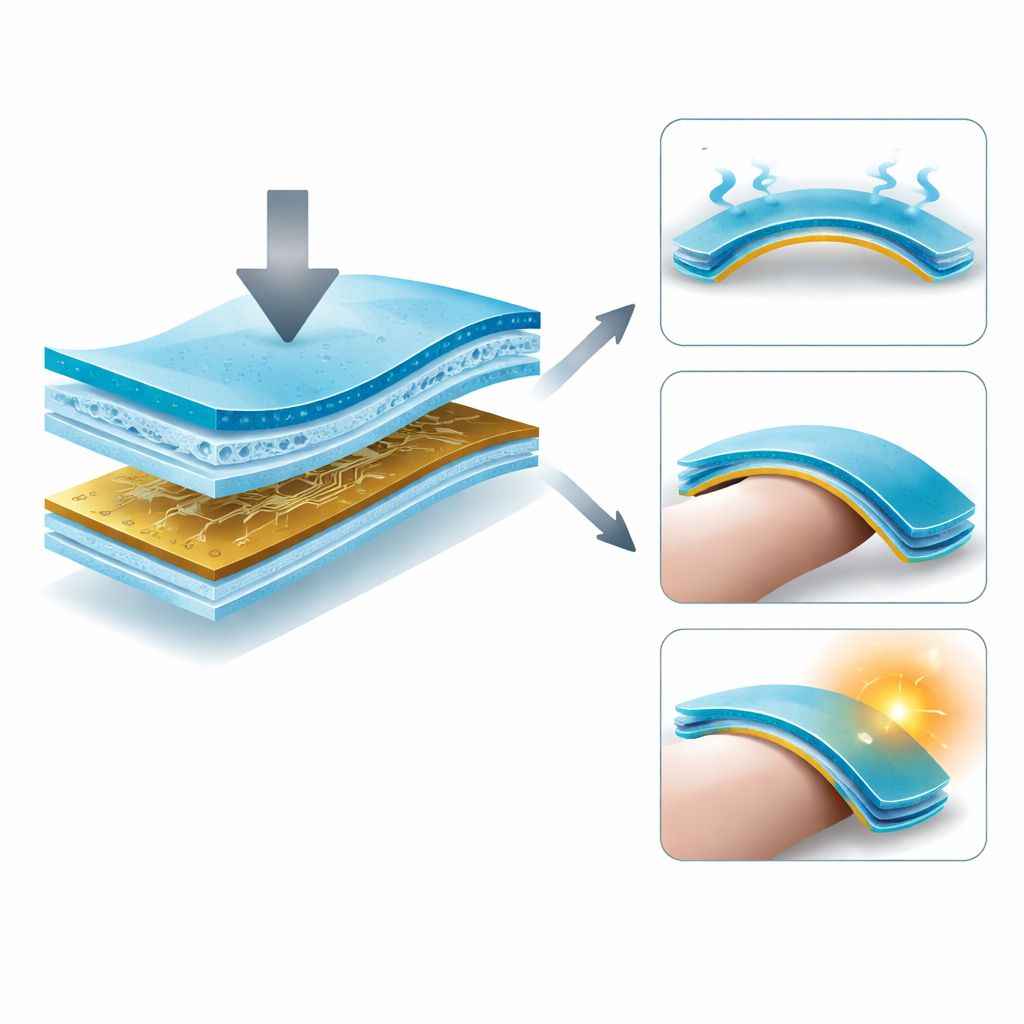
Van keukrobots tot speelse metgezellen
Om te laten zien wat deze e-huid kan, wikkelden de onderzoekers hem om een robotgrijper en gaven de robot een kookachtige taak. Terwijl de grijper naar een heet stuk brood beweegt, brengt een klein dieptesensor-module ingebed in de huid eerst in kaart hoe ver het object zich bevindt, waardoor de robot zijn vingers kan positioneren voordat er contact is. Zodra er contact is, sturen de druk- en buigsensoren hoe stevig hij knijpt, waardoor uitglijden of verplettering van het brood wordt voorkomen. Een temperatuursensor op hetzelfde vel controleert wanneer het brood voldoende is afgekoeld om veilig aan een persoon te worden gegeven. In een ander voorbeeld bouwde het team een zacht olifantenspeelgoed bedekt met e-huid. Drukken op de borst verandert het ritme van een verborgen vibratiemotor zodat het voelt als een hartslag, het buigen van een oor activeert geluid, en de warmte van een hand kan de wangen van het speelgoed laten oplichten, waardoor aanraking in een speelse, emotionele interactie wordt omgezet.
Patronen van druk over een oppervlak zien
Buiten individuele plekken kan dezelfde fabricagemethode grote drukgevoelige matrices vormen die uitlezen waar en hoe sterk een oppervlak wordt aangeraakt. Het team demonstreerde een 8 bij 15 raster dat werkt als een drukcamera: wanneer vingers, gewichten of gedrukte vormen neerdrukken, reconstrueert het systeem het krachtpatroon en identificeert zelfs contouren zoals letters. Deze mogelijkheid om drukkaarten en massacentra vast te leggen kan robots helpen ladingen te balanceren, objecten te herkennen of fungeren als slimme weegplatforms en interactieve oppervlakken. Omdat het onderliggende proces snel en modulair is, kunnen ontwerpers de grootte, afstand en zachtheid van de sensorpixels afstemmen op verschillende toepassingen, van slim meubilair tot houdingsbewakingsmatten.
Wat dit betekent voor alledaagse technologie
Door meerdere sensmodi—druk, buigen, warmte en nabijheid—te combineren in één dun, makkelijk aanpasbaar vel, brengt dit werk elektronische huid veel dichter bij de subtiele capaciteiten van menselijke huid. Hoewel er ruimte is om de prestaties bij zeer hoge drukken te verbeteren en sommige montagestappen te automatiseren, toont de benadering al aan dat rijk gevoel kan worden toegevoegd aan robots, speelgoed en andere apparaten zonder zwaar, handgemaakt materiaal. In praktische zin kan dit leiden tot huishoudrobots die breekbare voorwerpen veiliger behandelen, medische wearables die lichaamcontact comfortabeler volgen, en interactieve producten die veel natuurlijker op onze aanraking reageren.
Bronvermelding: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Trefwoorden: elektronische huid, tactiel voelen, flexibele sensoren, robotgrijper, interactieve apparaten