Clear Sky Science · nl
Snelzwemmende biohybride OstraBot met zelfgetrainde hoogsterkte spieren
Door spieren aangedreven robots duiken erin
Stel je kleine zwemmende machines voor die niet door elektromotoren, maar door levend spierweefsel uit het laboratorium worden aangedreven. Deze studie toont hoe onderzoekers geëngineerde spieren zichzelf leerden trainen tot een veel sterker "motor", en die vervolgens gebruikten om een miniatuur visachtige robot aan te drijven die sneller zwemt dan welke eerdere door skeletspieren aangedreven machine dan ook. Het werk wijst op toekomstige zachte robots die efficiënt, aanpasbaar en deels levend zijn.
Waarom biohybride spieren ertoe doen
Robots vertrouwen meestal op stijve motoren of luchtaangedreven zuigers. Die werken goed, maar kunnen zwaar, luidruchtig en slecht afgestemd zijn op de zachte, flexibele bewegingen van levende wezens. Geëngineerde spieren daarentegen draaien op eenvoudige voedingsstoffen, herstellen zich tot op zekere hoogte en kunnen zich aanpassen als ze worden gebruikt—net zoals ons eigen lichaam na oefening. Het probleem was het vermogen: in het lab gekweekte skeletspieren, vooral gemaakt van veelgebruikte C2C12-cellen, produceren doorgaans te weinig kracht om robots snel te laten bewegen of veel last te dragen. De meeste eerdere apparaten kruipen of zwemmen langzaam omdat hun spier"motoren" simpelweg te zwak waren.
Een zelftrainende sportschool voor levend weefsel
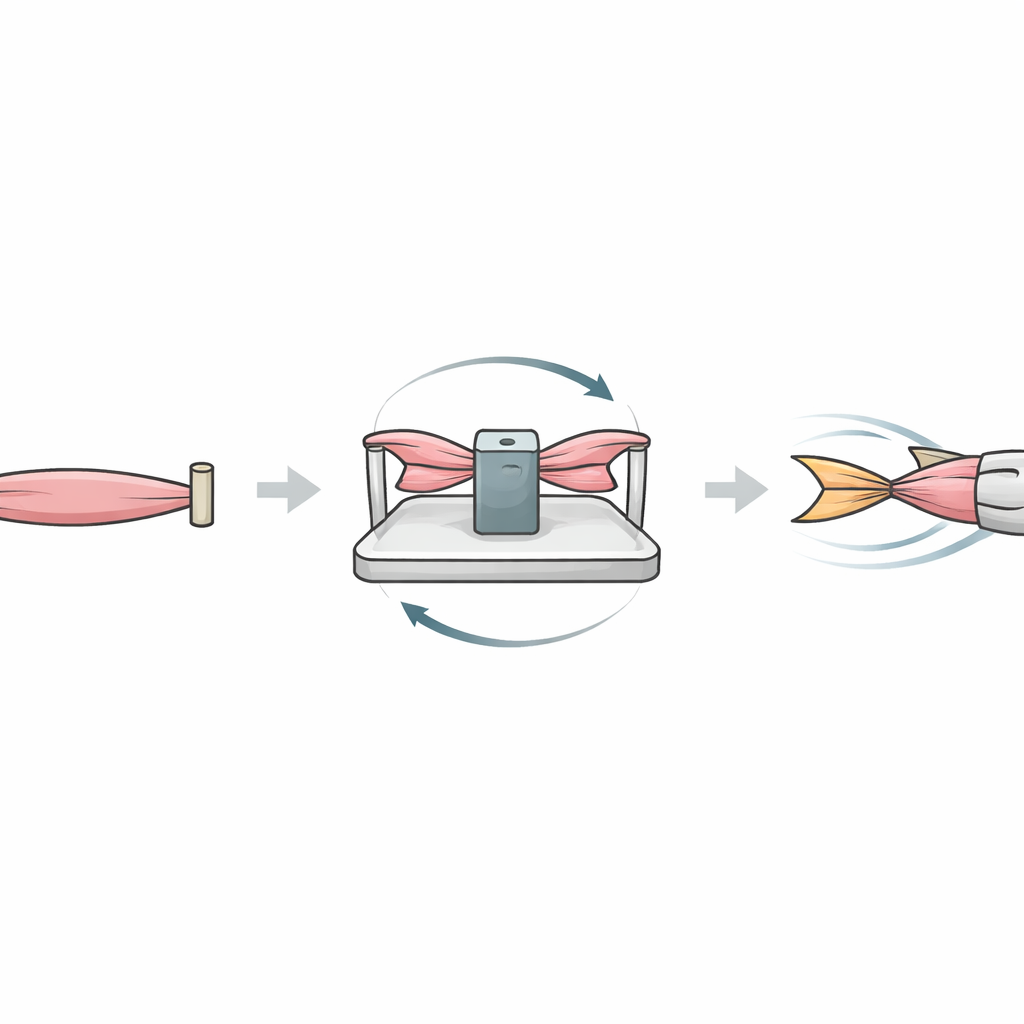
De onderzoekers losten dit op door het spierweefsel een ingebouwd trainingsregime te geven. Ze vormden ringvormige spierconstructies uit C2C12-cellen ingebed in een zachte gel en plaatsten paren van deze ringen op een aangepast apparaat geïnspireerd op armworstelen. Elke spierraam was aan het ene uiteinde verankerd en aan het andere uiteinde verbonden met een gedeeld schuifblok, zodat wanneer de ene spier samentrok, die de partner uitrekte, waarna de rollen omkeerden. Cruciaal was dat deze weefsels vroeg in hun ontwikkeling van nature spontaan twitchen, zelfs zonder elektrische stimulatie. Het apparaat zette dit spontane twitchgedrag om in continue heen-en-weer trainingscycli, waardoor beide spieren duizenden keren langer en korter werden zonder menselijke tussenkomst of externe machines.
Sterkere, duurzamere spiermotoren bouwen
Om te onderzoeken of deze zelftraining echt verschil maakte, vergeleek het team drie manieren om spieren te laten rijpen: een zeer zachte ondersteuning die beweging toeliet maar weinig weerstand bood, een zeer stijve ondersteuning die de lengte vasthield maar nauwelijks bewoog, en hun gepaarde zelftrainingsplatform. Onder de microscoop ontwikkelden de zelfgetrainde spieren dikkere, meer uitgelijnde vezels met duidelijke interne bandpatronen die geassocieerd zijn met rijper spierweefsel. Krachtmetingen bevestigden het visuele verschil: zelfgetrainde weefsels genereerden ongeveer zeven millinewton kracht—enkele malen meer dan spieren gekweekt op conventionele platformen en de hoogste tot nu toe gerapporteerde waarde voor dit celtype in robots. Ze hielden ook sterke contracties wekenlang vol, wat suggereert dat de training niet alleen het weefsel deed aangroeien maar het ook hielp functioneel te blijven over tijd.
Ontwerpen van een snelle door kistvis geïnspireerde zwemmer
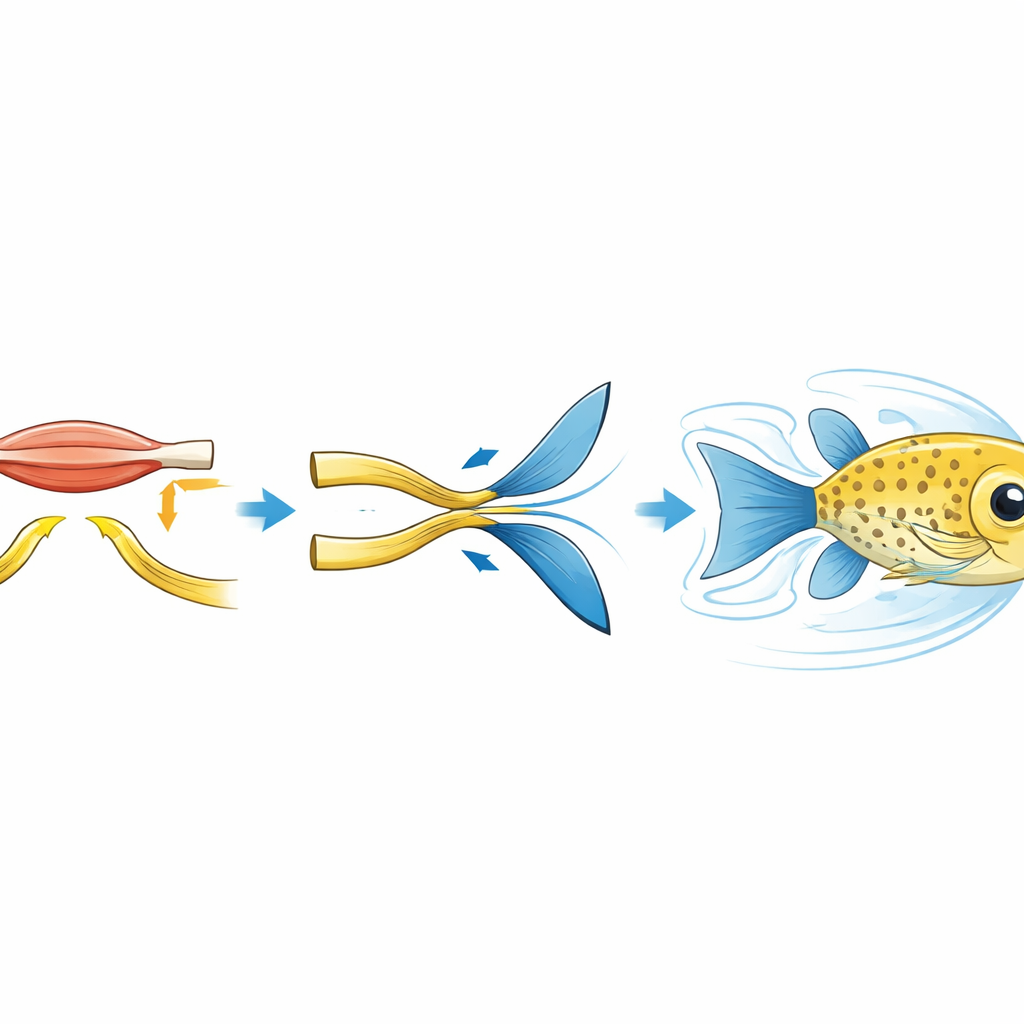
Gewapend met sterkere spier ging het team over tot de bouw van een kleine zwembot die zij OstraBot noemen, gemodelleerd naar de kistvis-achtige bewegingsstijl. In deze zwemmodus blijft het lichaam grotendeels stijf terwijl voortstuwing komt van zijdelingse of achterste staarten die heen en weer klapperen. OstraBots lichaam is een lichtgewicht 3D-geprint drijflichaam, de "pezen" zijn flexibele balken die kracht overbrengen, en de dubbele staarten functioneren als peddels. Wanneer de spierstrook samentrekt onder elektrische stimulatie, buigt hij de pezen, die op hun beurt de staarten laten zwaaien en water naar achteren duwen. Om het meeste uit hun levende motor te halen bouwde het team een wiskundig model dat koppelt hoe de spier samentrekt aan hoe de robot beweegt. Door de pezen als veren te behandelen en het omringende water als een dempende kracht, en door biologisch realistisch spiergedrag mee te rekenen, konden ze voorspellen welke combinaties van peesstijfheid en stimulatiefrequentie het meeste mechanische werk en dus de grootste zwemsnelheid zouden opleveren.
De juiste balans vinden voor snelheid en controle
Het model toonde een "goudlokje"-zone: pezen die te stijf waren bogen nauwelijks en verspeelden de spierkracht, terwijl te zachte pezen veel buigden maar niet effectief tegen het water duwden. Een tussenstijfheid, gecombineerd met een gematigde klopfrequentie, stelde de spier in staat bij elke cyclus maximaal nuttig werk te verrichten. Experimenten bevestigden deze voorspellingen. Robots met medium-stijve pezen zwommen veel sneller dan die met zachte of stijve pezen en bereikten snelheden van ongeveer 467 millimeter per minuut, of meer dan vijftien lichaamslengtes per minuut—een record voor door skeletspier aangedreven biohybride zwemmers. Het team kon de snelheid verder afstemmen door ofwel de pulsfrequentie van de spier aan te passen of de sterkte van het elektrische veld te variëren, en toonden zelfs clap-gestuurde start-en-stopfunctionaliteit met een geluidgestuurde schakeling. Wanneer de robot werd verstoord of naar achteren geduwd, herstelde hij snel en hervatte hij de voorwaartse beweging, dankzij zijn sterke spierstoot en goed afgestemde mechanica.
Wat dit betekent voor toekomstige levende machines
Voor niet-specialisten is de kernboodschap dat levend spierweefsel nu getraind en ontworpen kan worden om te concurreren met, en mogelijk superieur te zijn aan, veel synthetische zachte actuatorprincipes qua kracht en reactievermogen. Door weefsels zichzelf te laten oefenen via een slimme mechanische opstelling, en door een realistisch model te gebruiken om het ontwerp van de robot te sturen, overtroffen de onderzoekers een belangrijke prestatiedrempel in biohybride robotica. Hun benadering kan worden uitgebreid naar andere celtypen, grotere systemen en complexere machines, en opent een pad naar zachte robots die efficiënt, aanpasbaar en diep geïnspireerd zijn door de manier waarop echte dieren bewegen.
Bronvermelding: Chen, P., Wang, X., Zhou, J. et al. Fast-swimming biohybrid OstraBot with self-trained high-strength muscles. Nat Commun 17, 2246 (2026). https://doi.org/10.1038/s41467-026-70259-9
Trefwoorden: biohybride robots, geëngineerde spier, zachte robotica, zwemmende microrobots, weefseltechniek