Clear Sky Science · nl
Biomimetische actuator gemaakt van een relaxor-ferro-elektrische polymeernanocomposiet
Kleine robots die bewegen als echte insecten
Stel je een robot ter grootte van een rups voor die over ruw terrein kan kruipen, of een vlinderachtig apparaat dat met zijn vleugels slaat en van de grond optilt — en toch gemaakt is van één enkel, papierdun stuk plastic en minder energie verbruikt dan een LED-nachtlampje. Dit artikel beschrijft een nieuw soort zacht materiaal dat kan fungeren als kunstmatige spier, waardoor zulke robots op insectenschaal eenvoudiger, lichter en energiezuiniger worden dan voorheen.
Waarom kleine, zachte machines ertoe doen
Miniatuurrrobots geïnspireerd op insecten zouden zich een weg kunnen banen in ingestorte gebouwen om naar overlevenden te zoeken, door pijpleidingen kunnen kronkelen om infrastructuur te inspecteren, of stilletjes gewassen en bossen kunnen bewaken. Om in zulke krappe en onvoorspelbare omgevingen te kunnen functioneren, moeten ze klein, flexibel en robuust zijn, terwijl ze zeer weinig energie verbruiken. Veel huidige ontwerpen vertrouwen op ingewikkelde samenstellingen van tandwielen, scharnieren en meerdere materialen, die extra massa toevoegen, energie verspillen en moeilijker verkleinbaar zijn. De auteurs betogen dat de ideale oplossing één enkel materiaal is dat zowel beweging kan genereren als die beweging direct kan overbrengen, vergelijkbaar met hoe echte spieren in dieren werken.
Een slim plastic dat van binnenuit is ontworpen
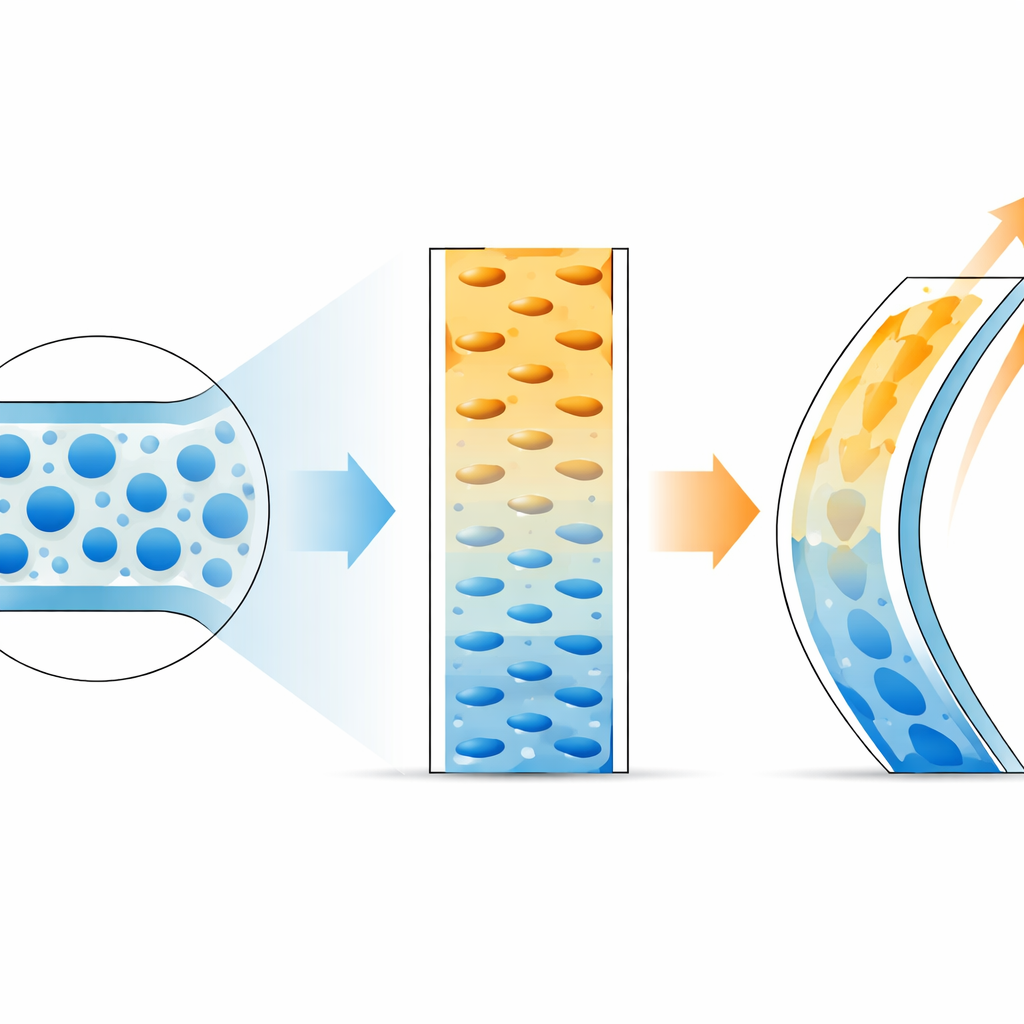
De kern van dit werk is een dunne kunststoffilm gebaseerd op een bekende materiaalfamilie genaamd PVDF, die al gewaardeerd wordt om zijn vermogen te vervormen onder invloed van een elektrisch veld. De onderzoekers mengen dit plastic met kleine “polymeerdotjes”, nanometerschaaldeeltjes bedekt met chemische groepen die waterstofbruggen kunnen vormen. Wanneer het mengsel tot een film wordt gegoten en op gecontroleerde wijze zacht wordt verwarmd, verdampt het oplosmiddel sneller aan de bovenkant dan aan de onderkant. Deze ongelijke droging, samen met de waterstofbruggen, bevordert dat de kunststofketens nabij het onderste oppervlak zich in een sterk geordende, polaire ordening rangschikken, terwijl de bovenkant minder geordend blijft. Het resultaat is een ingebouwde interne gradiënt door de dikte van één enkele laag.
Van verborgen structuur naar krachtige beweging
Deze subtiele structurele gradiënt levert een grote mechanische winst op. Wanneer een elektrisch veld over de film wordt aangelegd, reageert het meer geordende, sterk polaire onderste gebied sterker dan de bovenkant, waardoor de ene zijde van het blad meer uitzet dan de andere. Die onbalans doet de strook buigen, vergelijkbaar met een klassiek bimetaalstripje in een thermostaat, maar hier gebeurt het in een volledig organische, flexibele film van slechts enkele tientallen micrometers dik. Zorgvuldige metingen tonen aan dat de film zijn lengte met maximaal ongeveer 14 procent kan veranderen en mechanische energiedichtheden kan opslaan die in de buurt komen van die van harde keramische actuatoren — terwijl hij zacht en licht blijft. Vergeleken met een anderszins identieke film zonder polymeerdotjes of gradiëntverwerking produceert het nieuwe materiaal meerdere keren meer rek en zet het elektrische energie veel efficiënter om in beweging.
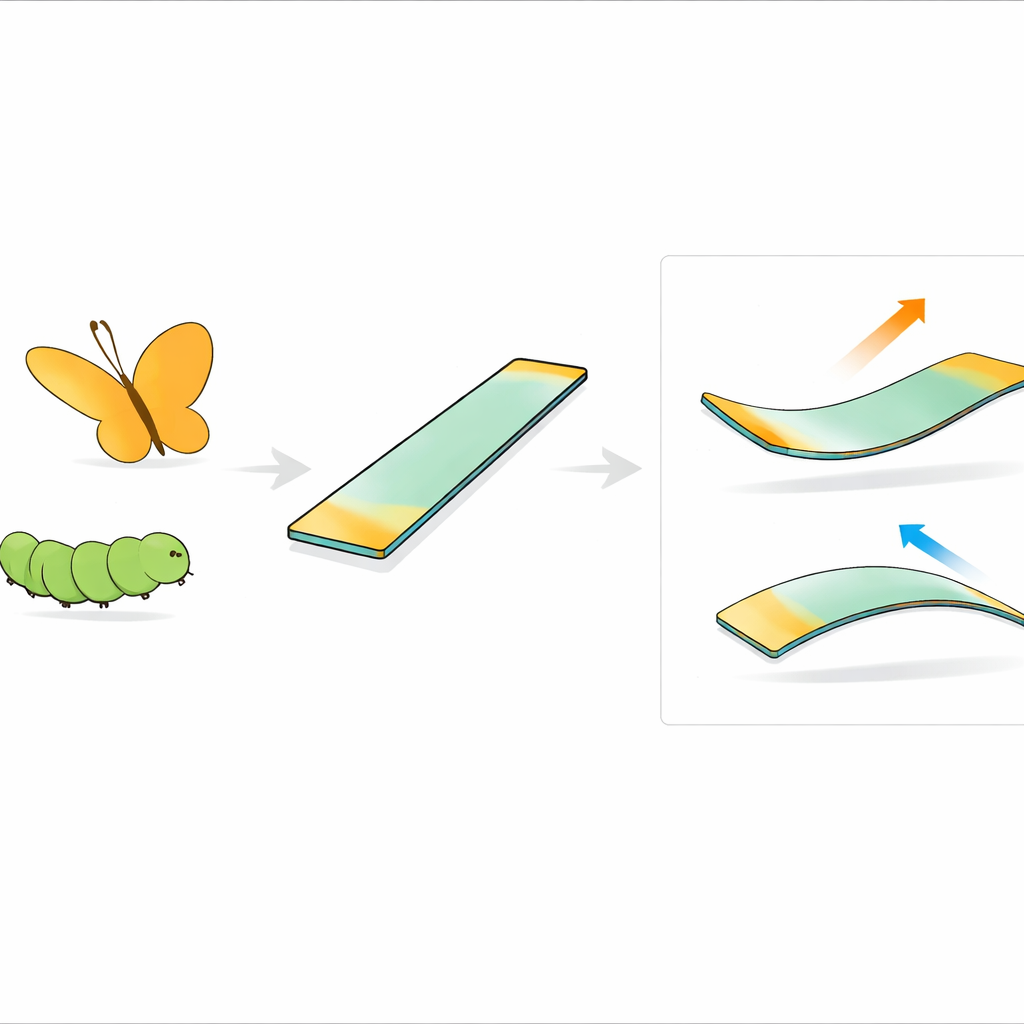
Een kruipende rups en een vliegende vlinder bouwen
Om te laten zien wat dit materiaal in de praktijk kan doen, snijdt het team de film in insectachtige vormen en voegt eenvoudige koolstofgebaseerde elektroden en dunne koperen steunjes toe. Eén ontwerp lijkt op een kleine rups met een bredere middenpartij en taps toelopende uiteinden; wanneer een wisselend elektrisch veld wordt toegepast, buigt de strook in een ritmisch patroon en kruipt hij over een geribbelde baan met snelheden van meerdere lichaamslengtes per seconde, terwijl hij slechts enkele milliwatt aan vermogen verbruikt. Een tweede ontwerp bootst een vlinder na, met een actief centraal gebied en flexibele vleugels. Aangestuurd door vergelijkbare elektrische signalen slaan de vleugels snel en kunnen ze het toestel enkele millimeters van een platform optillen, zelfs met ladingen tot twintig keer hun eigen gewicht — en dat alles met een totale actuatormassa van ongeveer 50 milligram.
Wat dit betekent voor toekomstige kleine robots
Deze studie toont aan dat door zorgvuldig te ontwerpen hoe een kunststofmateriaal van de ene naar de andere zijde georganiseerd is, het mogelijk is een enkele, ultradunne plaat te creëren die sterk buigt onder een elektrisch veld en complexe, levensechte bewegingen kan aandrijven. Hoewel de huidige apparaten nog relatief hoge spanningen vereisen, maken hun extreem lage energieverbruik en veerlichte constructie ze veelbelovende bouwstenen voor toekomstige robots op insectenschaal en slimme apparaten. Met verdere verfijningen om de bedrijfsspanning te verlagen, zouden soortgelijke films op een dag vlootjes van kleine, autonome machines mogelijk kunnen maken die kruipen, slaan en de wereld verkennen met kunstmatige spieren zo dun als een haar.
Bronvermelding: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Trefwoorden: zachte robotica, kunstmatige spieren, polymeeractuatoren, robotten op insectenschaal, elektroactieve materialen