Clear Sky Science · nl
Decoderen van fantoomledemaatbewegingen uit intraneurale opnames
Nieuwe manieren om te bewegen met een ontbrekend been
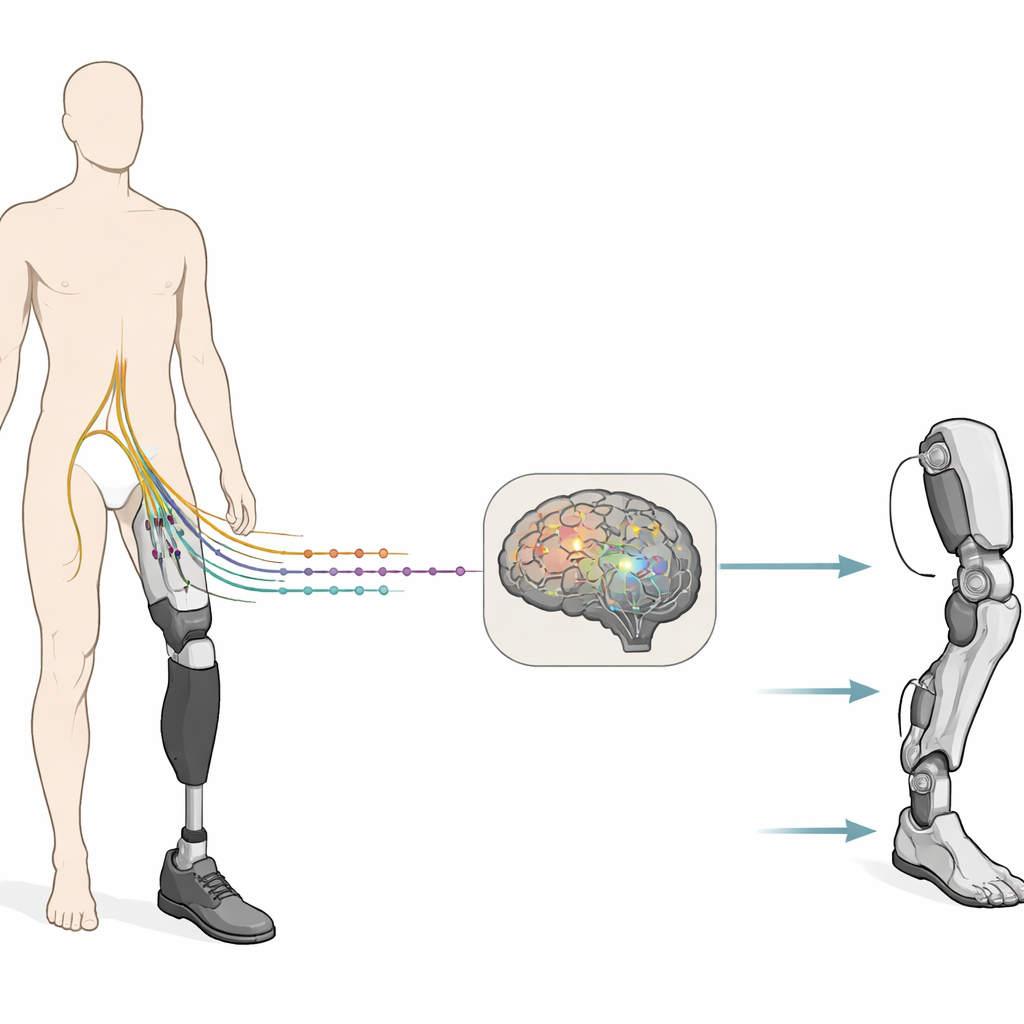
Voor mensen die boven de knie een been hebben verloren, voelt lopen met een prothese vaak meer als het besturen van een stijve machine dan als het bewegen van een eigen lichaamsdeel. Deze studie onderzoekt een andere weg: rechtstreeks luisteren naar de overgebleven beenzenuwen wanneer geamputeerden proberen hun “fantoom”been te bewegen, en die signalen gebruiken om een toekomstige bionische ledemaat aan te sturen. Door aan te sluiten op dezelfde bedrading die de hersenen vroeger gebruikten om de knie, enkel en tenen te bewegen, laten de onderzoekers zien dat natuurlijke, intuïtieve controle van een artificieel been binnen handbereik zou kunnen liggen.
Luisteren naar zenuwen in de dij
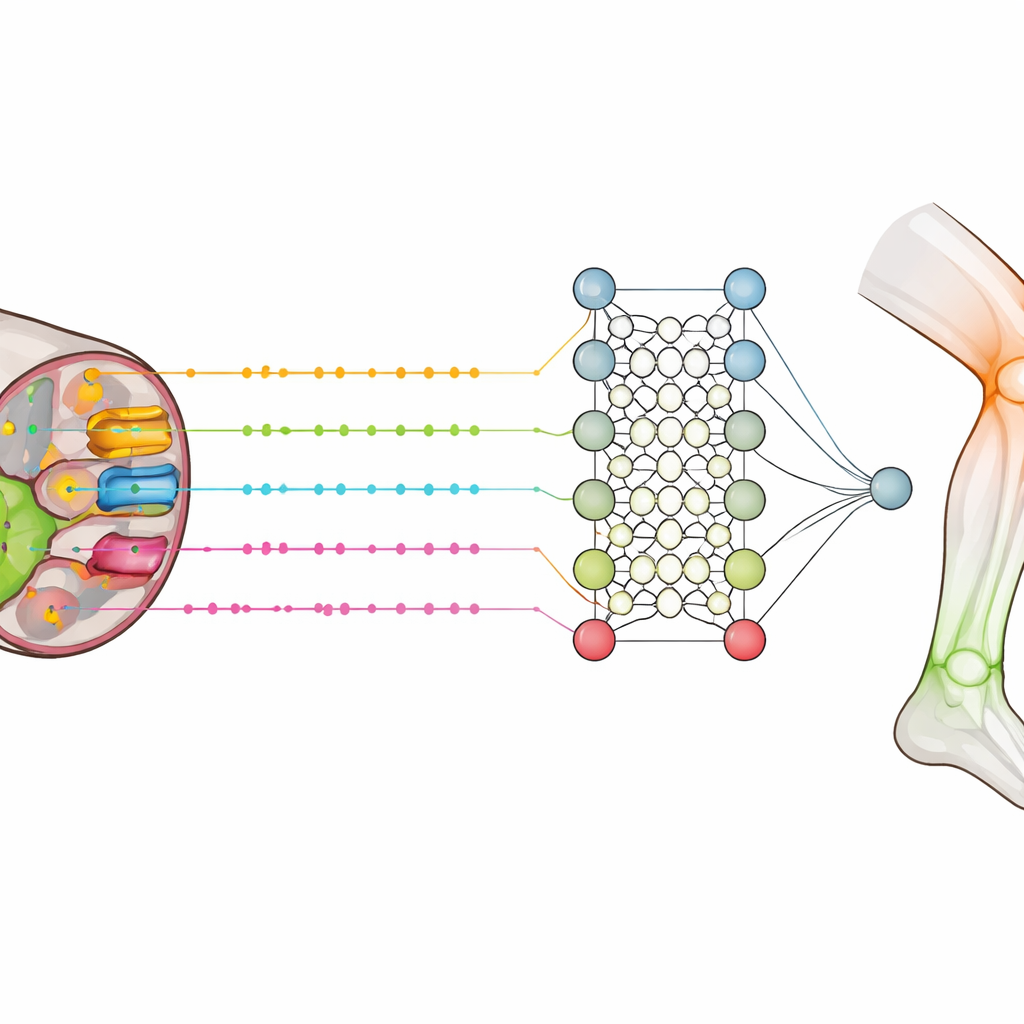
Het team werkte met twee proefpersonen die boven de knie een been hadden verloren maar nog steeds levendig hun fantoomledemaat konden voelen en “bewegen”. Chirurgen implanteren vier haarfijne elektrodebanen in een tak van de nervus ischiadicus aan de achterkant van de dij. Elke baan droeg meerdere kleine opnamesites, in totaal 56 kanalen. Wanneer de deelnemers zittend op commando hun fantoomknie, -enkel of -tenen wilden buigen of strekken, pikten de elektroden uitbarstingen van elektrische activiteit op van zenuwvezels die vroeger de nu ontbrekende spieren aanstuurden.
Spookbewegingen laten echte elektrische sporen achter
Ondanks dat het onderste deel van het been ontbrak, leverden pogingen om het te bewegen duidelijke en gestructureerde signalen in de zenuw op. De meeste opnamesites reageerden op ten minste één type beweging, en veel sites konden buigen en strekken onderscheiden. Sommige elektroden waren meer afgestemd op kniebewegingen, andere meer op enkel of tenen, wat weerspiegelt hoe verschillende spiergroepen op de zenuw zijn aangesloten. De sterkte en timing van de vuurmotorpatronen verschilden per gewricht, wat suggereert dat de oorspronkelijke “kaart” van beenbesturing bewaard is gebleven in de resterende zenuwstomp. De onderzoekers vonden ook dat deze motorpatronen goed overeenkwamen met de bekende anatomie: zenuwkanalen die op een bepaalde beweging oplichtten, kwamen vaak overeen met de spieren die normaal die beweging zouden uitvoeren.
Een door de hersenen geïnspireerde decoder leren
Het vastleggen van zenuwactiviteit is slechts de helft van het verhaal; een toekomstige prothese moet die complexe signalen snel omzetten in commando’s. De wetenschappers wendden zich tot een spiking neurale netwerk, een type artificieel netwerk dat communiceert met korte elektrische pulsen, vergelijkbaar met echte neuronen. Ze transformeerden eerst de ruwe zenuwopnames in dichte treinen van spikes die benadrukten hoe het vermogen van het signaal in de loop van de tijd veranderde. Die spike-treinen werden vervolgens gevoed aan een compacte decoder die leerde ze in bewegingsklassen te verdelen, zoals enkelbuiging of kniestrekking. Vergeleken met standaard machine-learningtools was de spiking-decoder zowel nauwkeuriger als efficiënter en herkende betrouwbaar meerdere bedoelde bewegingen uit korte fragmenten van zenuwactiviteit.
Zenuw- en spiersignalen combineren
Omdat de elektroden tussen dijspieren zaten, pikten ze ook kleinere spiersignalen op in een lagere frequentieband. Door de opnames te filteren kon het team spiersachtige activiteit scheiden van de snellere zenuwspikes. Wanneer ze hun decoder trainden op alleen spiersignalen, verbeterde de prestatie vergeleken met alleen hoogfrequente zenuwdata. Het beste resultaat werd bereikt door beide bronnen — zenuw en resterende spieractiviteit — te combineren, vooral voor knie- en enkelacties. Dit suggereert dat één geïmplanteerde technologie zowel zenuwverkeer als overgebleven spieractiviteit kan benutten om een rijker, stabieler regelsignaal voor een robotisch been te bieden.
De grond voelen terwijl het been beweegt
Dezelfde intraneurale elektroden die uitgaande bewegingscommando’s registreerden, konden ook in omgekeerde richting worden gebruikt: om kleine elektrische pulsen terug de zenuw in te sturen en sensaties op te roepen. In eerder werk met deze deelnemers veroorzaakte stimulatie via deze implantaten aanrakingachtige gewaarwordingen op de voetzool en tenen. In de huidige studie brachten de onderzoekers in kaart waar motorgerelateerde opnames en aanrakinggerelateerde sensaties elkaar overlappen. Ze ontdekten dat zenuwvezels voor beweging en sensatie op dijniveau grotendeels gescheiden waren, wat ontwerpers kan helpen bepaalde contacten vooral aan motorische decoding toe te wijzen en andere vooral aan sensorische feedback, waardoor interferentie tussen beide wordt verminderd.
Wat dit betekent voor toekomstige bionische benen
Voor een niet-specialistische lezer is de kernboodschap dat de “draden” voor het bewegen van een ontbrekend been nog steeds actief en uitleesbaar zijn, zelfs jaren na amputatie. Door fijne elektroden in de overgebleven zenuw te plaatsen en hersen-geïnspireerde algoritmen te gebruiken om de signalen te interpreteren, is het mogelijk om moment voor moment te bepalen of een geamputeerde probeert de knie te buigen, de enkel te richten of de tenen van een fantoomledemaat te krullen. In combinatie met elektrische stimulatie die het gevoel van aanraking van de ontbrekende voet herstelt, zou deze aanpak prothetische benen mogelijk maken die veel meer voelen en bewegen als een natuurlijk ledemaat. Hoewel het werk nog in een vroeg laboratoriumstadium verkeert en offline alleen bij twee mensen is getest, vormt het een belangrijke basis voor toekomstige protheses die rechtstreeks op het zenuwstelsel aansluiten en meer intuïtieve controle, betere balans en een sterker gevoel van belichaming bieden.
Bronvermelding: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Trefwoorden: fantoomledemaat, neuroprothetiek, perifeer zenuwinterface, spiking neurale netwerken, onderbeenamputatie