Clear Sky Science · nl
Handachtige autonome vliegende robot voor luchtgrijpen en interactie
Vliegende helpers waarmee je bijna een hand kunt schudden
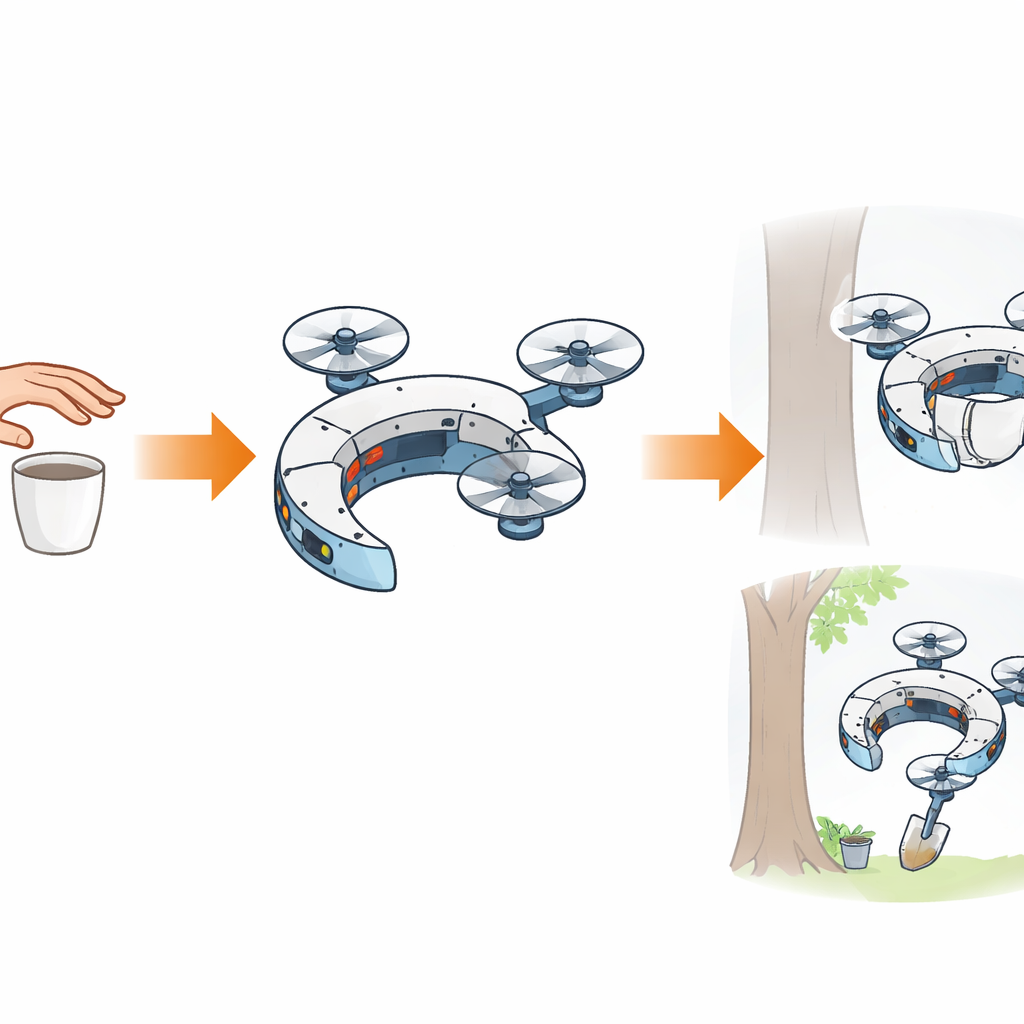
Stel je een kleine vliegende robot voor die niet alleen je omgeving kan filmen, maar ook een deur kan openen, je een drankje aanreiken of een pakket van een moeilijk bereikbare plank kan pakken. Deze studie introduceert precies dat soort apparaat: een compact drone‑ontwerp waarvan het lichaam dubbel dienstdoet als hand. Door ideeën uit vogelvlucht en menselijke grijpfuncties te combineren, laten de onderzoekers zien hoe luchtrobots verder kunnen gaan dan passief observeren en actieve helpers kunnen worden in huizen, fabrieken en zoek‑en‑reddingssituaties.
Van vliegende camera’s naar vliegende handen
De meeste drones van tegenwoordig zijn “vliegende ogen” die worden gebruikt voor fotografie, kaartvorming of inspectie. Wanneer ingenieurs proberen robotarmen toe te voegen zodat drones dingen kunnen grijpen of duwen, worden de toestellen snel log, zwaar, energieverslindend en lastig te besturen—vooral binnenshuis of in de buurt van mensen. De auteurs pakken dit probleem aan door het drone‑lichaam zelf opnieuw te ontwerpen. In plaats van een losse arm erop vast te schroeven, maken ze het hele frame zo dat het als een hand kan functioneren: het kan om objecten heen sluiten, op palen of takken gaan zitten en toch behendig door nauwe ruimtes vliegen.
Een handvormig vliegend lichaam
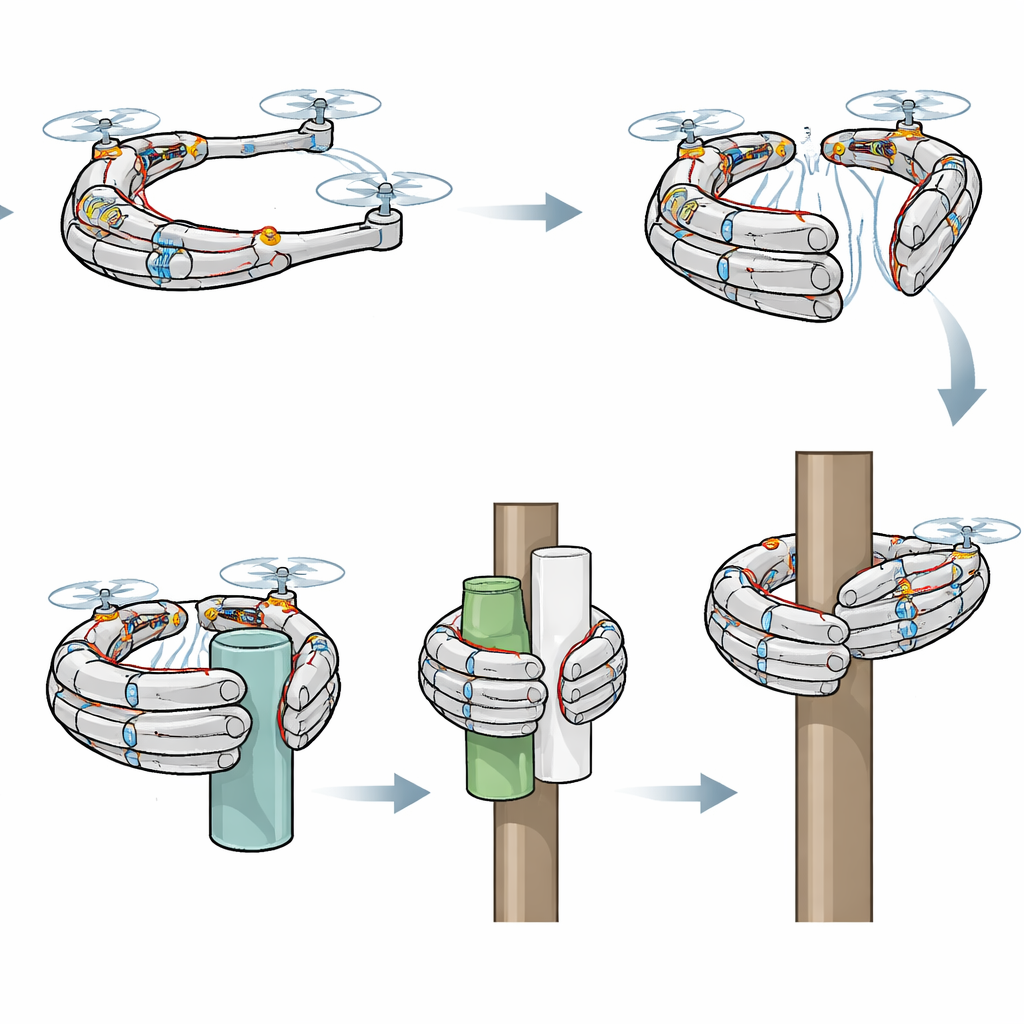
De nieuwe robot, HI‑ARM genoemd, heeft ongeveer de grootte en het gewicht van een volwassen hand. Het frame vormt een open C‑vorm die doet denken aan een gebogen palm met vingers. Binnen deze ring zitten uitschuifbare segmenten en draaiende gewrichten, aangedreven niet door veel motoren maar door een enkele peesachtige koord die door één servo wordt aangetrokken. Veren laten de structuur buigen en vervolgens terugveren naar de oorspronkelijke vorm, waarbij energie wordt opgeslagen en vrijgegeven zoals spieren en pezen dat doen. Dit onderaandreven ontwerp stelt de robot in staat zich aan te passen aan onbekende voorwerpen: naarmate het koord strakker wordt, drukken en draaien verschillende onderdelen totdat ze zich vanzelf naar het vastgegrepen object vormen.
Hoe de robot denkt en vliegt
Om dit veranderende lichaam bruikbaar te maken, bouwt het team een gelaagde “hersenen” voor de robot. Een deel plant waar de drone naartoe moet vliegen en wanneer hij moet grijpen, loslaten of gaan zitten, met behulp van een bibliotheek van basishandelingen zoals “pakken”, “loslaten” of “op een paal landen”. Een ander deel vertaalt deze plannen naar vloeiende paden in de ruimte die de drone in realtime kan volgen. Een snelle regelsystem zorgt er vervolgens voortdurend voor dat de positie van de robot wordt geschat, de verschuivende plaats van het zwaartepunt terwijl het lichaam vervormt, en de extra krachten wanneer het iets optilt of er tegen duwt. Adaptieve algoritmen detecteren deze verstoringen en verhogen of herverdelen automatisch de stuwkracht van de vier propellers zodat de vlucht stabiel blijft, zelfs terwijl het lichaam een fles knijpt of tegen een deur duwt.
Wat deze vliegende hand kan doen
In binnentests voert HI‑ARM herkenbare, mensachtige handelingen uit. Hij gebruikt zijn “palm” om een volle waterfles te grijpen en mee te dragen langs een nauwkeurig vluchtpad, en zijn “vingertoppen” om een dun servet tussen duim en wijsvinger te knijpen en op te tillen—een bijzonder delicate taak voor een machine. Hetzelfde mechanisme past zich aan speelgoed, dozen, tassen en vreemd gevormde blokken aan zonder dat de vormen van tevoren bekend hoeven te zijn. De robot kan naar een boomstam of paal vliegen, zich eromheen klemmen, zijn propellers uitzetten en daar gewoon hangen, met veel minder energieverbruik dan continu hoveren. Hij kan ook een deur naderen, zich om het handvat sluiten en de deur zwaaien terwijl hij zichzelf in balans houdt ondanks de terugduwkrachten.
Mensen helpen en werken in de buitenlucht
De onderzoekers verkennen ook hoe zo’n apparaat met mensen kan omgaan. In een huisachtige scène neemt de drone een pakket uit iemands hand, bergt het op, haalt een drankje van een tafel, reikt het aan, verzamelt later de lege fles en landt uiteindelijk op een kapstok om te wachten op de volgende taak—alles in één doorlopende, vloeiende reeks. Met videobril en een eenvoudige eenhandscontroller leidt een persoon met beperkte mobiliteit de robot op afstand om een kop koffie buiten op te pakken en over tientallen meters terug te brengen. In buitentests landt de drone op bamboe en palen, knijpt zich door een smalle rotsopening door zijn lichaam te verkleinen, en vervoert een drankje over een rivier, wat wijst op mogelijke toepassingen in bezorging, inspectie en redding.
Wat dit betekent voor het dagelijks leven
Het werk toont aan dat een kleine, handvormige vliegende robot behendig vliegen kan combineren met verrassend mensachtige manieren van grijpen, landen en interactie met objecten en mensen. Door het ontwerp van het lichaam, bewegingsplanning en adaptieve besturing nauw te integreren, overwinnen de auteurs veel van de grootte‑ en stabiliteitsproblemen die eerdere luchtmanipulatoren belemmerden. Hoewel toekomstige versies betere aan boord visie en slimmere beslisregels nodig zullen hebben om volledig autonoom te opereren, wijst deze studie op een toekomst waarin “vliegende handen” kunnen helpen met pakketbezorging, mensen met een beperking bijstaan, infrastructuur onderhouden en delicate taken uitvoeren op plekken die onhandig of gevaarlijk zijn voor mensen om te bereiken.
Bronvermelding: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Trefwoorden: luchtmanipulatie, vliegende robothand, drones, mens-robotinteractie, biomimetische robotica