Clear Sky Science · nl
Robotspringen verbeterd door stuwkracht-geïnduceerde hypogravitatie, met precieze, voorspelbare en verlengde sprongen
Robots die springen alsof ze op de maan zijn
Stel je een reddingsrobot voor die over muren heen kan springen, over beekjes kan huppelen of door een bewegend raam kan duiken zonder zijn landingsplek met meer dan een centimeter te missen. Dit artikel beschrijft een nieuw soort springmachine die precies dat doet door zichzelf kortstondig een “lage zwaartekracht” te geven, vergelijkbaar met op de Maan of Pluto, terwijl zijn sprongen toch precies en voorspelbaar blijven.
Waarom springende robots het nu moeilijk hebben
Dieren zoals krekelachtigen of kikkers kunnen ver springen, op smalle zitplaatsen landen en halverwege in de lucht bijsturen als er iets verandert. De meeste robots kunnen dat niet. Traditionele springrobots staan voor een compromis: ze kunnen óf heel ver springen met sterke veren of motoren, óf ze kunnen precies en veilig landen, maar zelden beide. Veerbeladen "katapult"-ontwerpen slaan veel energie op maar laden langzaam en zijn moeilijk te controleren zodra ze in de lucht zijn. Direct door motoren aangedreven poten zijn makkelijker te sturen maar missen de krachtpiek voor zeer hoge sprongen. Extra vleugels of rotoren kunnen de vluchttijd verlengen, maar vaak maken ze het traject rommelig en onvoorspelbaar, wat problematisch is als je een klein doel moet raken of bewegende obstakels moet ontwijken.
Valse lage zwaartekracht met luchtstuwkracht
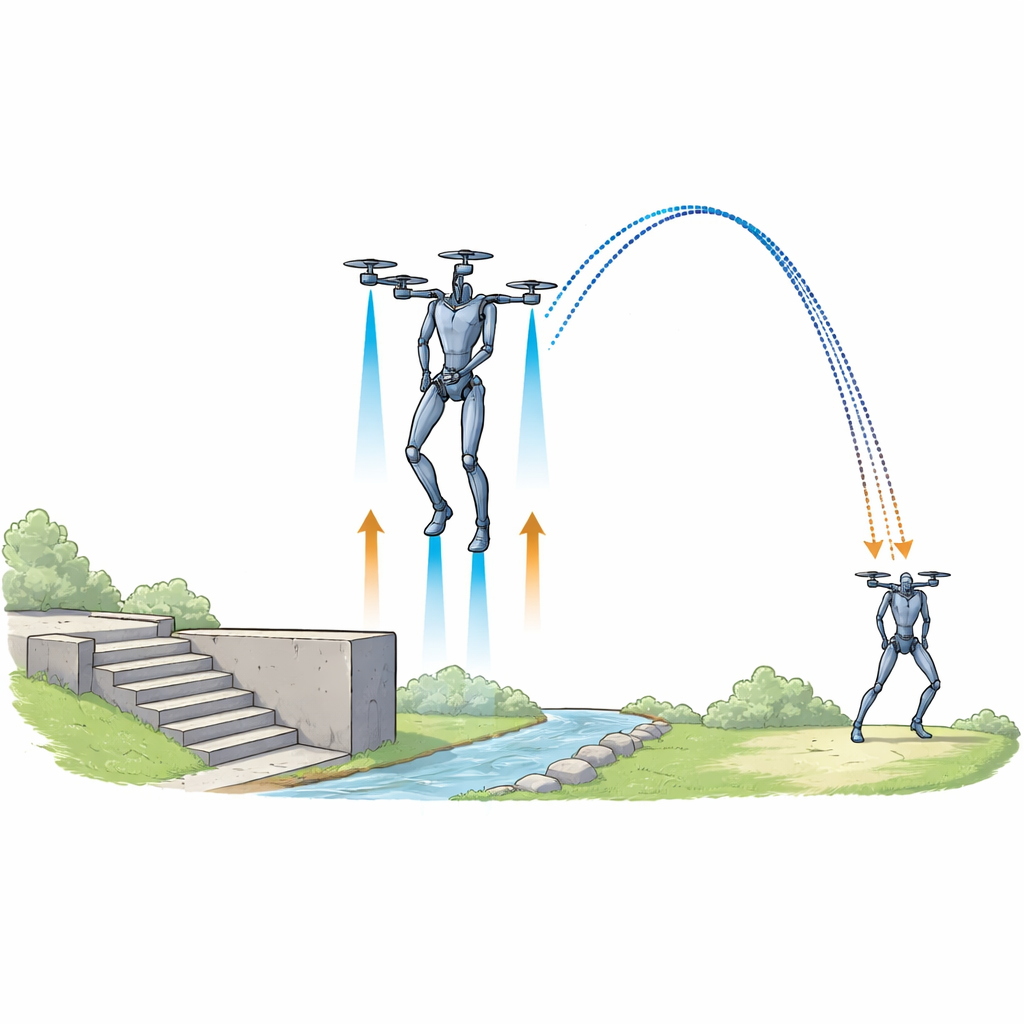
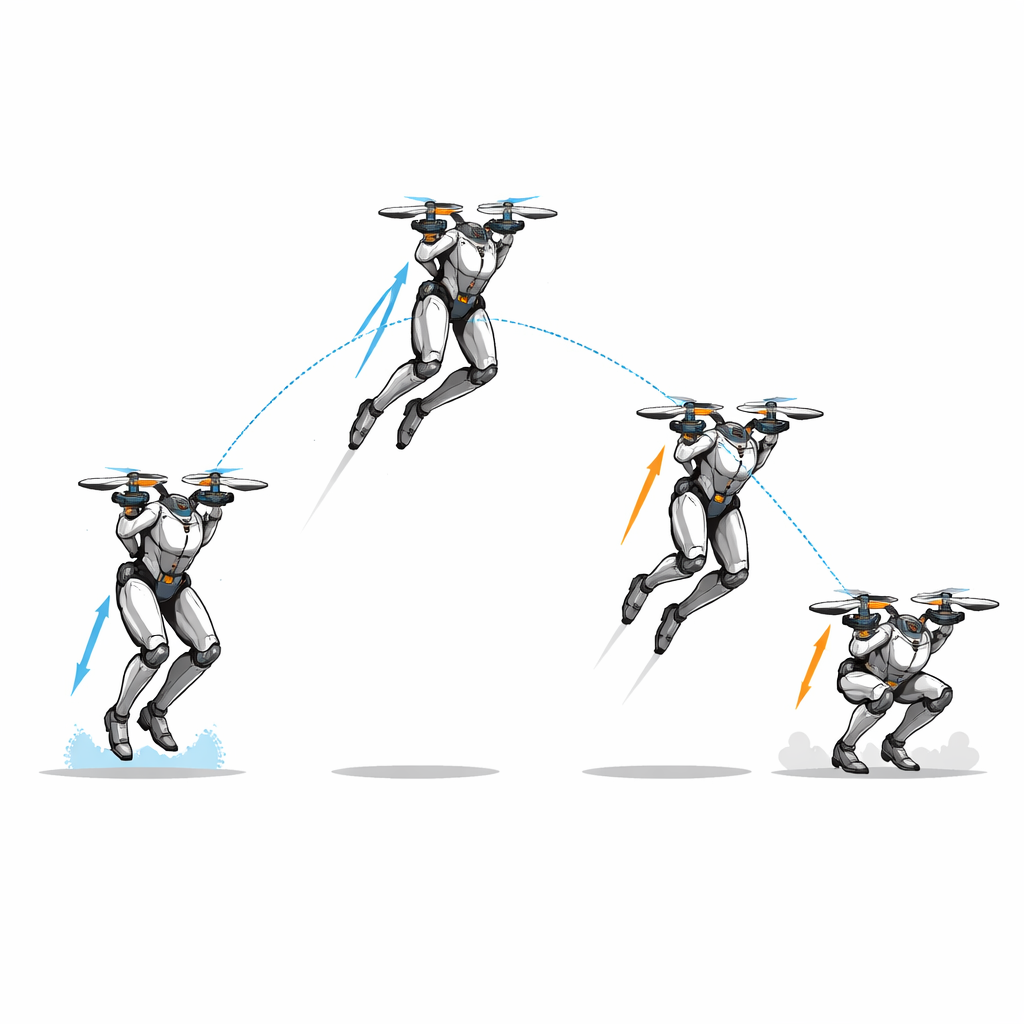
De onderzoekers bouwden een 370 gram wegende tweebenige robot genaamd GravOff die dit compromis omzeilt door zijn eigen lage-zwaartekrachtomgeving te creëren. De robot heeft een paar lange, insectachtige poten direct aangedreven door motoren, plus vier kleine propellers gemonteerd op een brede frame. Tijdens een sprong geven de poten een snelle stoot van de grond om een hoge afsnelheid te bereiken. Tegelijk duwen de propellers net genoeg omhoog om een deel van de zwaartekracht van de aarde te compenseren, een toestand die de auteurs "stuwkracht-geïnduceerde hypogravitatie" noemen. Omdat de "effectieve zwaartekracht" lager is, stuurt dezelfde pootkracht de robot langs een veel hogere en langere boog—tot 6,9 meter hoog, ongeveer 46 keer zijn lichaamslengte—vergelijkbaar met de beste recordspringers maar met zachtere afzet- en landingssnelheden.
De perfecte boog tekenen en sturen
Wat GravOff bijzonder maakt is niet alleen hoe ver hij springt, maar hoe precies hij een gekozen pad volgt. Het team behandelt elke sprong als een tijdgestempelde boog, waarbij positie en timing vastliggen als punten op een getekende parabool. Met behulp van sensoren en een voorspellend regelingsalgoritme vergelijkt de robot zijn werkelijke beweging in de lucht tientallen keren per seconde met deze referentiekromme en kantelt zijn rotors lichtjes om zichzelf weer op koers te duwen. Cruciaal is dat de propellers onafhankelijk van de helling van het robotlichaam kunnen draaien, zodat de robot zijn stuwkracht kan richten zonder het hele frame te laten hellen, waardoor balans en sturen gescheiden blijven. Deze dubbele besturing laat GravOff binnen een vierkant van slechts 25 centimeter per zijde landen met millimeterniveau herhaalbaarheid, zelfs wanneer de afzethoek tot wel 15 graden afwijkt of wanneer een sterke ventilator tijdens de vlucht een wind van 3,5 meter per seconde op hem richt.
Zachte, stabiele landingen zonder stuiteren
Hoge sprongen betekenen doorgaans harde landingen, die hardware kunnen beschadigen of een robot kunnen doen rollen. GravOff pakt dit aan met twee landingsmodi. Bij bijzonder harde inslagen helpt een zacht 3D-geprint schokdemper in elke poot om energie op te nemen. Voor precieze landingen op kleine of bewegende doelen trekt de robot actief zijn poten in en strekt ze dan op het juiste moment weer uit, waardoor de contacttijd met de grond wordt uitgerekt. Deze "actieve demping" vermindert de impactkrachten met een factor vier vergeleken met passief landen en neutraliseert bijna de binnenkomende impuls, zodat de robot bij de eerste aanraking stopt in plaats van weg te stuiteren.
Van laboratoriumsprongen naar missies buiten
Buiten gecontroleerde binnentests laten de auteurs zien dat GravOff springen kan combineren met kruipen en rollen om echt terrein te beheersen. Hij kan langzaam kruipen over gras, zand, keien en gegroefde bestrating om een veilige afzetpose in te nemen, en vervolgens hypogravitatie-sprongen gebruiken om obstakels te nemen zoals trappen met meerdere treden, een 2,35 meter hoge muur of een drie meter brede stroom. De lage-zwaartekracht springstrategie blijkt ook veel energiezuiniger dan puur vliegen om middelgrote obstakels te passeren: in sommige tests verbruikten sprongen minder dan één tiende van de totale energie die nodig zou zijn om over hetzelfde obstakel te zweven of te vliegen.
Wat dit betekent voor toekomstige robots
Kort gezegd toont dit werk aan dat robots verder, nauwkeuriger en veiliger kunnen springen door te doen alsof de zwaartekracht zwakker is en door hun vluchtpad na de afzet bij te sturen. Het ontwerp van GravOff wijst op toekomstige verkenners die tijdens noodhulp over puin zouden kunnen hoppen of kliffen en kraters op andere planeten kunnen doorkruisen, terwijl ze precies voorspellen waar en wanneer ze landen. Dezelfde ideeën—zwaartekracht compenseren met stuwkracht en de boog halverwege de vlucht sturen—kunnen aan veel andere springrobots worden toegevoegd, waardoor springen mogelijk verandert in een betrouwbare, vooruitplannende voortbewegingsmodus in plaats van een riskante laatste optie.
Bronvermelding: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Trefwoorden: springende robots, hypogravitatie, stuurrichting van stuwkracht, benig voortbewegen, trajectbesturing