Clear Sky Science · nl
Bio-geïnspireerde spiking-architectuur maakt energiebeperkte aanrakingcodering mogelijk
Waarom slimmer aanraken belangrijk is voor robots
Onze vingertoppen laten ons een zandkorrel, een glijdend glas of een zachte tik binnen een fractie van een seconde voelen, en dat met opmerkelijk weinig energie. Nu robots de fabriekshal verlaten en onze huizen, ziekenhuizen en drukke werkplekken binnentreden, zullen ze een vergelijkbaar gevoel voor aanraking nodig hebben om veilig met mensen en breekbare objecten te kunnen omgaan. Deze studie introduceert een nieuwe kunstmatige huid en een brein-geïnspireerd verwerkingssysteem dat machines in staat stelt met hoge precisie te detecteren waar ze worden aangeraakt, terwijl het energieverbruik extreem laag blijft — een cruciale vereiste voor toekomstige mobiele en samenwerkende robots.
Een flexibele huid die aan de onze doet denken
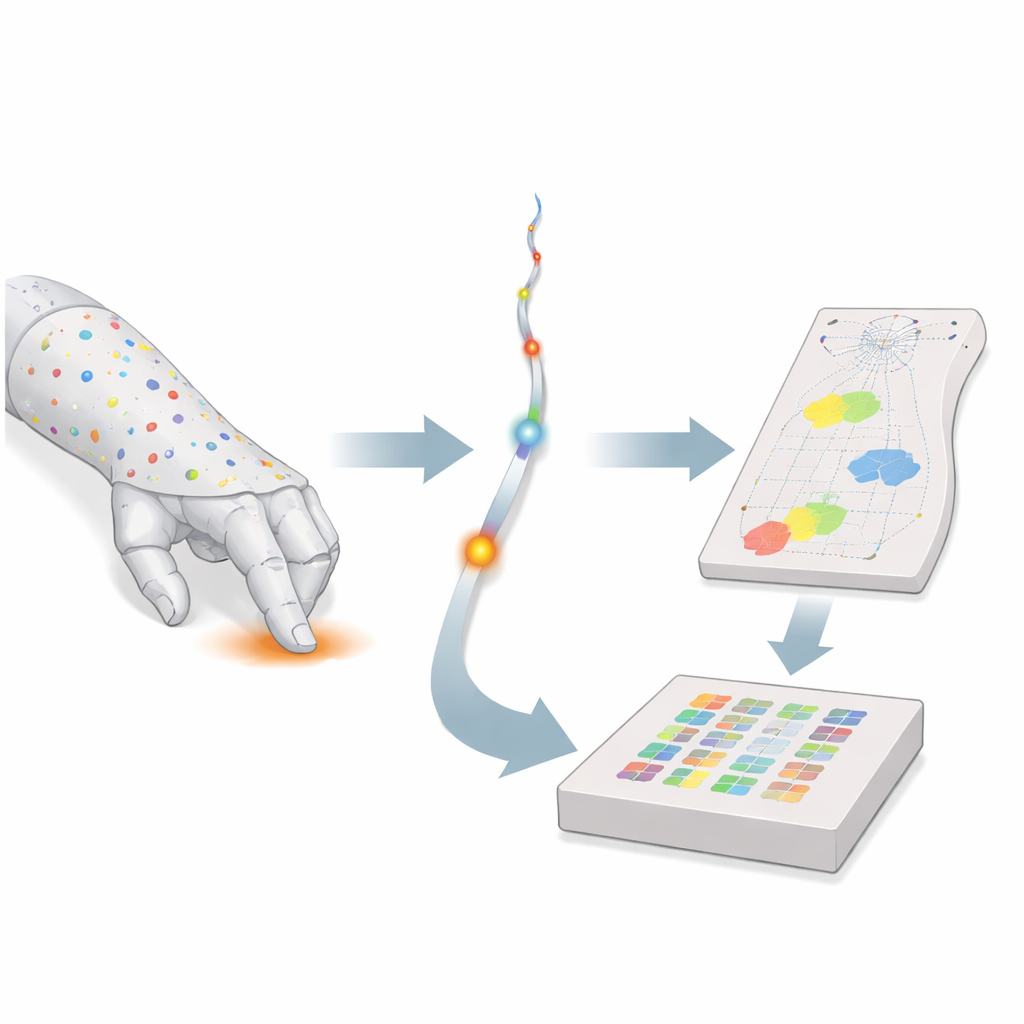
De onderzoekers bouwden een zachte, siliconen "e-huid" in de vorm van een menselijke onderarm en voorzagen die van 21 kleine optische sensoren langs een enkele haarfijne vezel. Deze sensoren, Fiber Bragg Gratings genoemd, reageren op rek en buiging van de huid door de kleur van het in de vezel teruggekaatste licht te verschuiven. Omdat de vezel onder het oppervlak meandert, is elke sensor gevoelig voor niet alleen één punt maar voor een klein gebied, vergelijkbaar met hoe echte tastreceptoren door onze huid verspreid zijn. Sommige van deze kunstmatige receptoren reageren sterk op zeer lokale druk, terwijl andere breder reageren op vervormingen, wat weergeeft hoe verschillende zenuwuiteinden in de menselijke huid zowel fijne details als de algemene vorm vastleggen.
Het omzetten van aanraking in elektrische spikes
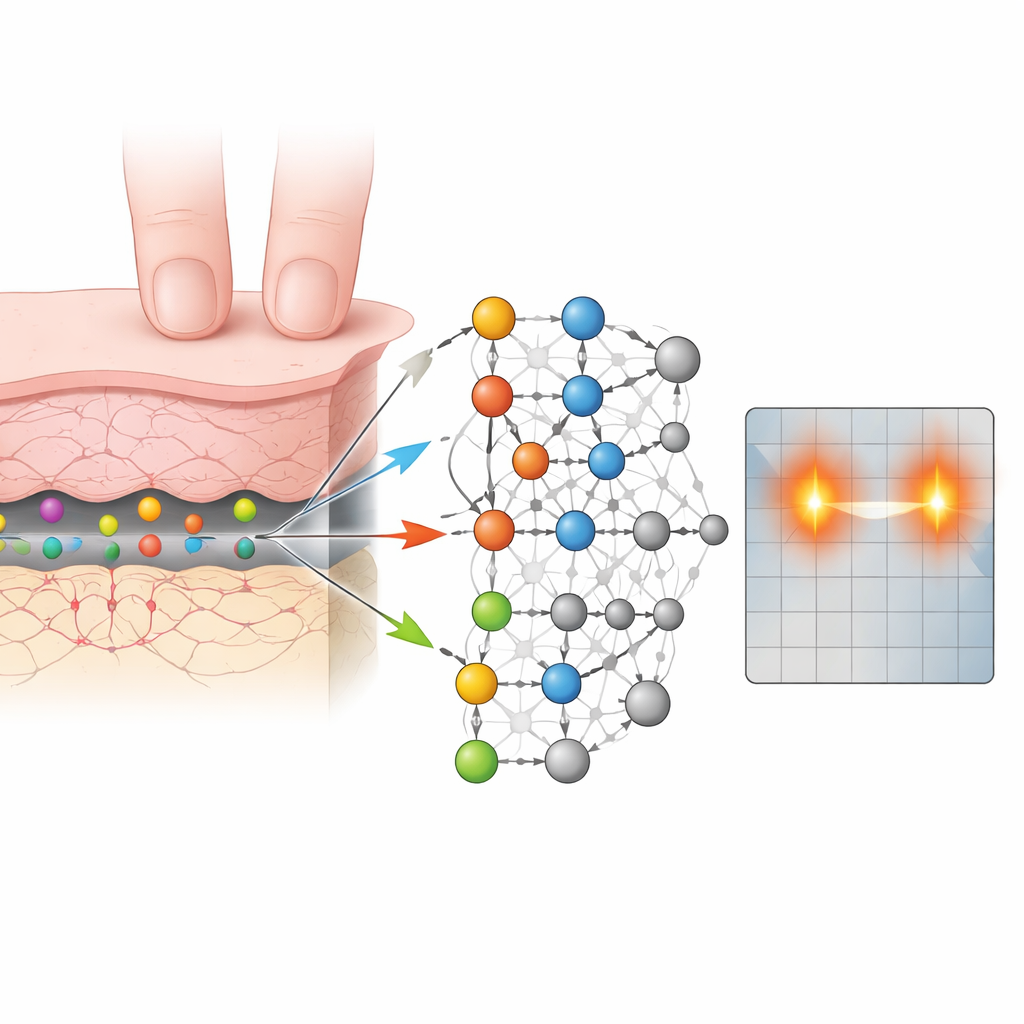
Om deze rijke stroom van gegevens te interpreteren, gebruikte het team geen conventionele deep-learningmodellen die met frames van getallen werken. In plaats daarvan imiteerden ze de biologie nauwkeuriger met een spiking neurale netwerk, waarin informatie zich verplaatst als korte elektrische pulsen, of "spikes", vergelijkbaar met zenuwimpulsen. De optische signalen van de e-huid worden omgezet in stroompjes spikes en naar het netwerk gestuurd. Elke uitvoerneuron in dit netwerk staat voor een specifieke plek op de huid en vormt zo een tweedimensionale interne kaart van het oppervlak. Wanneer iets de e-huid aanraakt, vuurt een cluster neuronen in een patroon dat onthult waar het contact plaatsvond, en het systeem berekent de aanrakinglocatie uit het centrum van deze activiteit.
Scherpere aanraking met minder middelen
Met dit ontwerp lokaliseert het systeem enkele aanrakingen op de kunstmatige onderarm met een typische fout van ongeveer drie millimeter, presterend omtrent een derde beter dan een sterke deep-learning baseline en met zo'n tien keer betere ruimtelijke resolutie dan op basis van alleen de sensoraffiniteit verwacht zou worden. Het werkt ook wanneer meerdere punten tegelijk worden ingedrukt—tot vier gelijktijdige contacten—en wanneer drukken handmatig met variërende kracht en richting worden toegepast. De onderzoekers onderzochten verschillende interne bedradingpatronen in het netwerk en ontdekten dat een lay-out geïnspireerd door vroege touch-pathways in het ruggenmerg — waar excitatoire cellen in inhibitoire interneuronen voeden die de buur-uitgangen onderdrukken — cruciaal is om ruimtelijke details te verscherpen. Deze "laterale inhibitie" helpt de representatie scherp te houden en voorkomt vervaging wanneer contacten dicht bij elkaar liggen.
Gebouwd voor laag energieverbruik, niet alleen nauwkeurigheid
Een centraal doel van het werk is het energieverbruik onder controle te houden, een kwestie die kritisch wordt als een hele robotlichaam met sensoren wordt bedekt. Het team trainde het netwerk met toenemende druk om minder spikes te vuren, wat het evolutionaire compromis tussen ruwe prestatie en metabole kosten nabootst. Onder onbeperkte omstandigheden presteerde een flexibeler, minder biologisch realistische architectuur iets beter. Maar zodra de spike-activiteit was teruggebracht naar energie-efficiënte niveaus, bleek de bio-geïnspireerde lay-out te winnen, met hogere nauwkeurigheid bij hetzelfde activiteitbudget. De onderzoekers poortten dit netwerk vervolgens naar een mixed-signal neuromorfe chip die neuronen en synapsen direct in analoge elektronica implementeert. Op deze hardware draaide het tactiele systeem tijdens aanraking met een vermogen onder de milliwatt en slechts enkele microwatts in rust, met een minimaal verlies aan precisie.
Van laboratoriumonderarmen naar toekomstige robotlichaamdelen
Al met al laat dit werk zien dat het zorgvuldig combineren van zachte, gedistribueerde sensoring met breinachtige spikingberekening machines een precieze en snelle tastzin kan geven zonder hoge energiekosten. Door niet alleen de prestatie maar ook de bedradingprincipes van vroege touch-pathways in het zenuwstelsel na te bootsen, suggereert het systeem waarom evolutie bepaalde circuitmotieven mogelijk heeft bevoordeeld: ze leveren voldoende nauwkeurigheid binnen strikte energielimieten. Op grotere schaal zouden vergelijkbare e-huiden en neuromorfe processoren robots en protheses in staat kunnen stellen contact over hun oppervlak te voelen, snel te reageren op onverwachte stoten en veiliger en natuurlijker te interacteren in de complexe, dynamische omgevingen waar mensen leven en werken.
Bronvermelding: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Trefwoorden: kunstmatige huid, tactiele sensoring, spiking neurale netwerken, neuromorfe hardware, robotica veiligheid