Clear Sky Science · nl
Een parallelbenig insect-schaalrobot gebaseerd op een actuatiestructuur-geïntegreerd origami-mechanisme
Kleine robots voor krappe ruimten
Stel je een reddingsrobot voor die klein en licht genoeg is om door een scheur in een muur te kruipen, over een smalle pijp te glijden of zelfs een plas water over te zwemmen. Dit artikel introduceert zo’n machine: een handpalmgroot, insectachtig robotje genaamd PLioBot, gemaakt van één enkel gevouwen vel, dat voor zijn formaat zeer snel beweegt en met veel soorten ruw terrein kan omgaan. De onderzoekers laten zien hoe slimme vouwtechnieken gecombineerd met piepkleine trilmotoren platte materialen kunnen veranderen in behendige verkenners voor krappe, moeilijk bereikbare plaatsen.
Van plat vel naar vierbenige kruiper
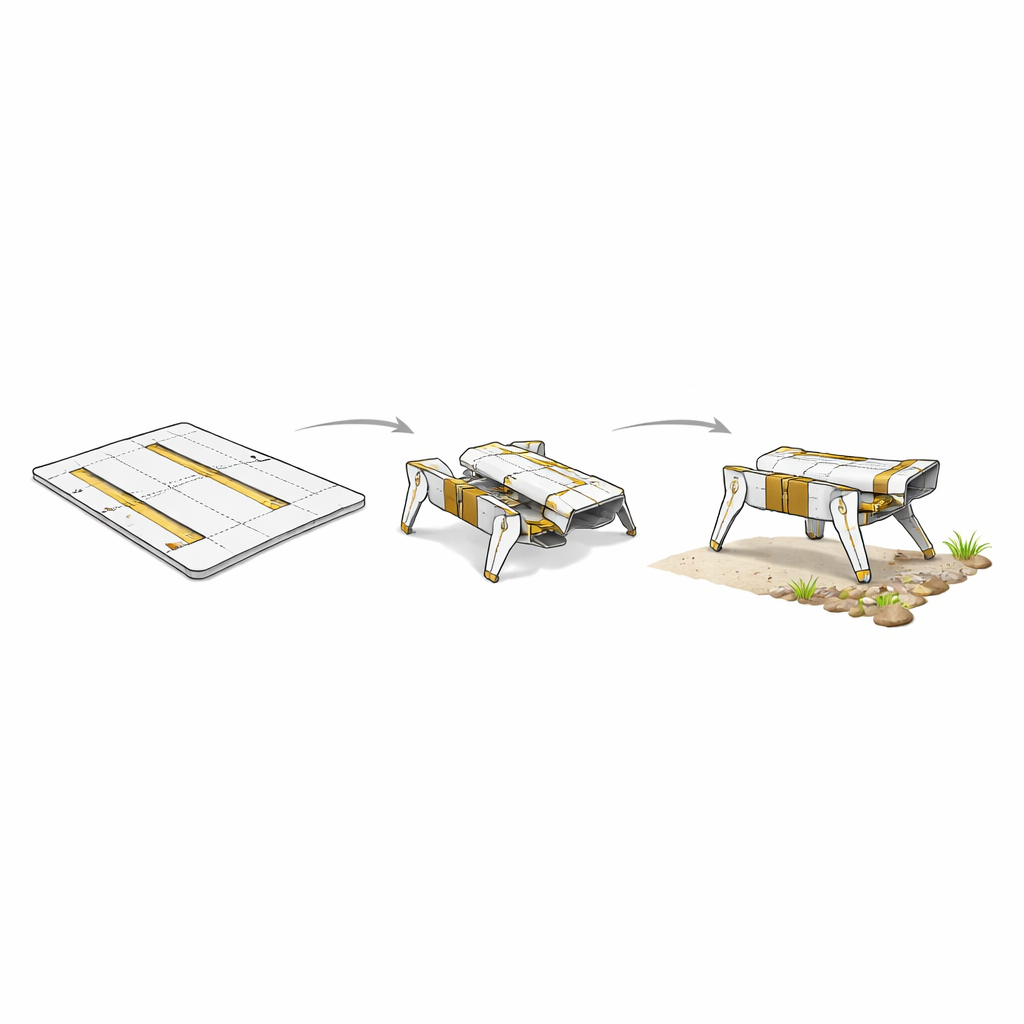
PLioBot begint als een plat patroon, vergelijkbaar met een knip-en-vouw papieren speeltje. In plaats van papier is het patroon een vijflaagse sandwich van glasvezel, koolstofvezel, een flexibele kunststof folie en stroken van piezo-elektrisch keramiek die als spieren fungeren. Nauwkeurig geplaatste dunne zones in de kunststoflaag dienen als scharnieren. Na laser snijden wordt de hele structuur in een uitgekiende volgorde gevouwen zodat het lichaam, de vier poten en alle acht actuatoren uit één doorlopend stuk ontstaan. Geen schroeven, geen losse motoren en geen handmatige uitlijning—enkel vouwen produceert een complete robot van ongeveer 2,5 centimeter lang en met een gewicht van slechts 1,2 gram.
Hoe de kleine poten grote stappen zetten
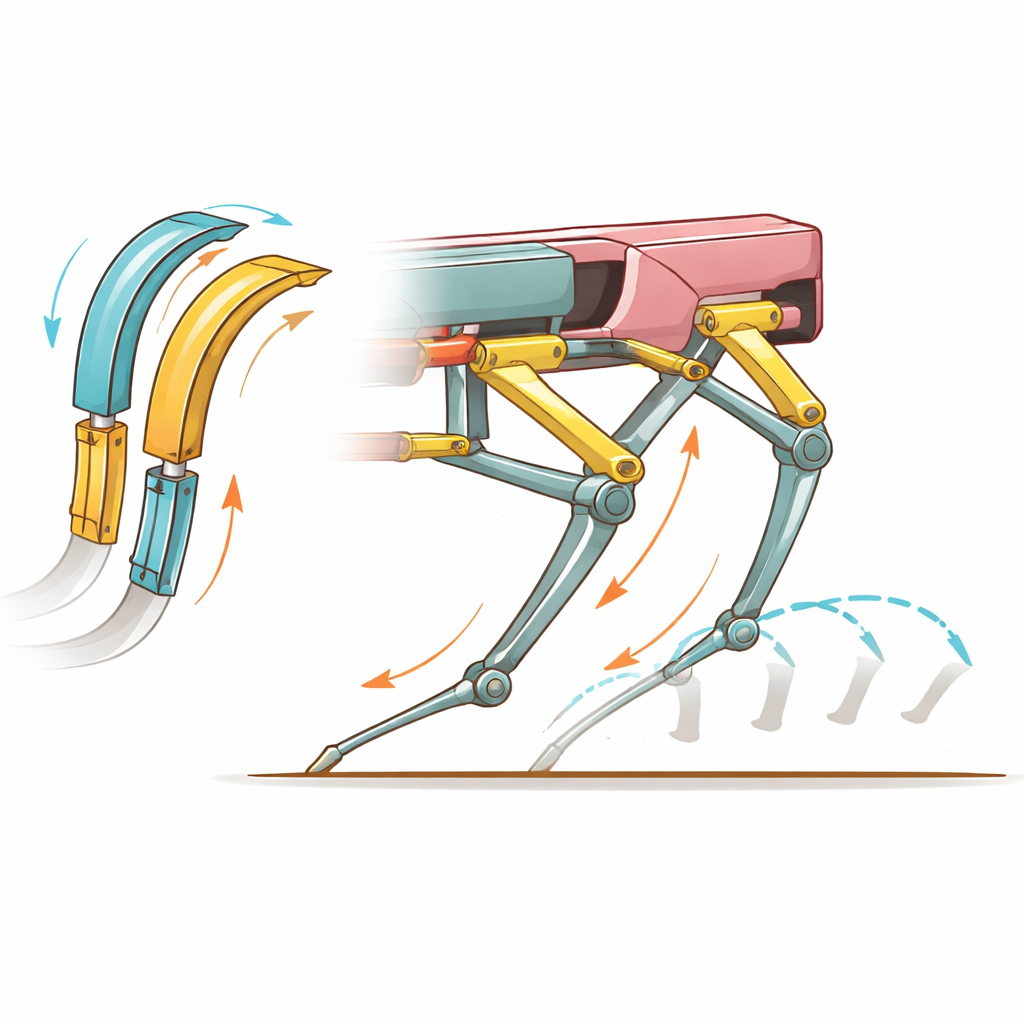
De beweging van de robot wordt geleverd door piezo-elektrische keramieken — materialen die licht vervormen wanneer een elektrische spanning wordt aangelegd. Elke zijde van PLioBot draagt een paar "tweeling" strookactuatoren. Wanneer wisselende spanningen deze stroken heen en weer laten buigen, wordt hun beweging door een set scharnierende koppelingsarmen overgebracht die fungeren als een miniatuur parallel benenmechanisme. Door de signalen zorgvuldig te timen kan elke poot op en neer bewegen en vooruit en achteruit, waarbij de voet een lusvormig pad aflegt. Het coördineren van alle vier de poten in een drafachtig patroon laat de robot efficiënt tegen de grond duwen en vooruit schieten. Bij de beste instellingen bereikt PLioBot 44,6 centimeter per seconde — ongeveer 18 lichaamslengtes per seconde — waarmee het een van de snelste benige robots op deze schaal is.
Ingebouwde spieren, minder montageproblemen
De meeste robots op insectschaal worden nauwgezet samengesteld uit veel kleine onderdelen: losse motoren of actuatoren, kaders en koppelingsarmen die allemaal met de hand uitgelijnd moeten worden. Dat verhoogt de kosten, beperkt de precisie en bemoeilijkt massaproductie. De auteurs pakken dit aan door structuur en activering volledig te integreren in één "origami-mechanisme." Ze gebruiken een verfijnd lamineerproces waarbij alle lagen — stijve glasvezel buitenlagen, orthogonale koolstofvezel-elektroden, de flexibele scharnierfolie en de keramische stroken — worden gesneden, gestapeld, uitgelijnd met pen-gaten en warmgeperst voordat de uiteindelijke omtrek met laser wordt vrijgegeven. Het resultaat is een robuuste platte blanco die al het skelet, de gewrichten en de spieren van de robot in hun eindpositie bevat, klaar om in vorm gevouwen te worden.
Lopen, klimmen en zwemmen in echte terreinomstandigheden
Om te onderzoeken of hun ontwerp buiten de labbank bruikbaar is, heeft het team PLioBot door een verscheidenheid aan alledaagse obstakels gestuurd. Op glad glas bestaat glijgevaar, maar hij beweegt nog steeds snel; op spons en acryl krijgt hij meer grip ten koste van wat snelheid. Hij klimt hellingen tot 12 graden en kan lasten slepen die zwaarder zijn dan hijzelf — tot 1,7 gram, met bijzonder goede prestaties bij ladingen onder ongeveer 0,8 gram. In smalle tunnels van slechts 3 centimeter breed en minder dan 3 centimeter hoog draagt de robot een lading van 1,4 gram terwijl hij meerdere lichaamslengtes per seconde behoudt. Door hemisferische voetkussentjes of vinachtige peddels te monteren, doorkruist PLioBot grind en gras, steekt verschuivend zand over zonder weg te zakken, loopt over de bodem van een bak en zwemt zelfs aan het wateroppervlak waarbij alleen zijn flippers voor stuwkracht zorgen.
Wat dit betekent voor toekomstige kleine verkenners
In eenvoudige bewoordingen toont dit werk aan dat je een zeer kleine robot kunt printen en vouwen waarvan lichaam en spieren één geheel vormen, en dat deze robot snel kan bewegen en veel rommelige, echte oppervlakken aankan. PLioBot is nog steeds afhankelijk van externe voedingsdraden, dus hij is nog niet volledig onafhankelijk. Maar het geïntegreerde origami-ontwerp en de fabricagemethode wijzen op een toekomst waarin grote aantallen goedkope robots op insectschaal als platte onderdelen kunnen worden geproduceerd, in vorm gevouwen en uitgerust met miniatuurbatterijen en besturingscircuits. Zulke zwermen zouden op een dag beschadigde gebouwen kunnen verkennen, industriële leidingen kunnen inspecteren of andere planeten kunnen verkennen — allemaal beginnend met iets dat op het eerste gezicht lijkt op een slim uitgesneden vel.
Bronvermelding: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Trefwoorden: robots op insectschaal, origami-robotica, piëzo-elektrische actuatoren, terrein-adaptieve voortbeweging, micro-robotfabricage