Clear Sky Science · nl
Draadvormige vormenherinnerende legering-actuatoren: modellering, ontwerp en besturing
Metalen draden die hun vorm "onthouden"
Stel je een dunne metalen draad voor die als een spier kan trekken, geruisloos de vinger van een robot kan buigen, een vleugel van een vliegtuig tijdens de vlucht kan hervormen of zachtjes een falend hart kan samentrekken — allemaal door hem simpelweg te verwarmen en te laten afkoelen. Dit overzichtsartikel behandelt dergelijke draden, gemaakt van vormenherinnerende legeringen (SMA's), en verklaart hoe ze werken, hoe ingenieurs ze ontwerpen en besturen, en waar ze al in de praktijk worden toegepast in robots, vliegtuigen, medische apparaten en draagbare technologie.
Hoe slimme metalen draden tot leven komen
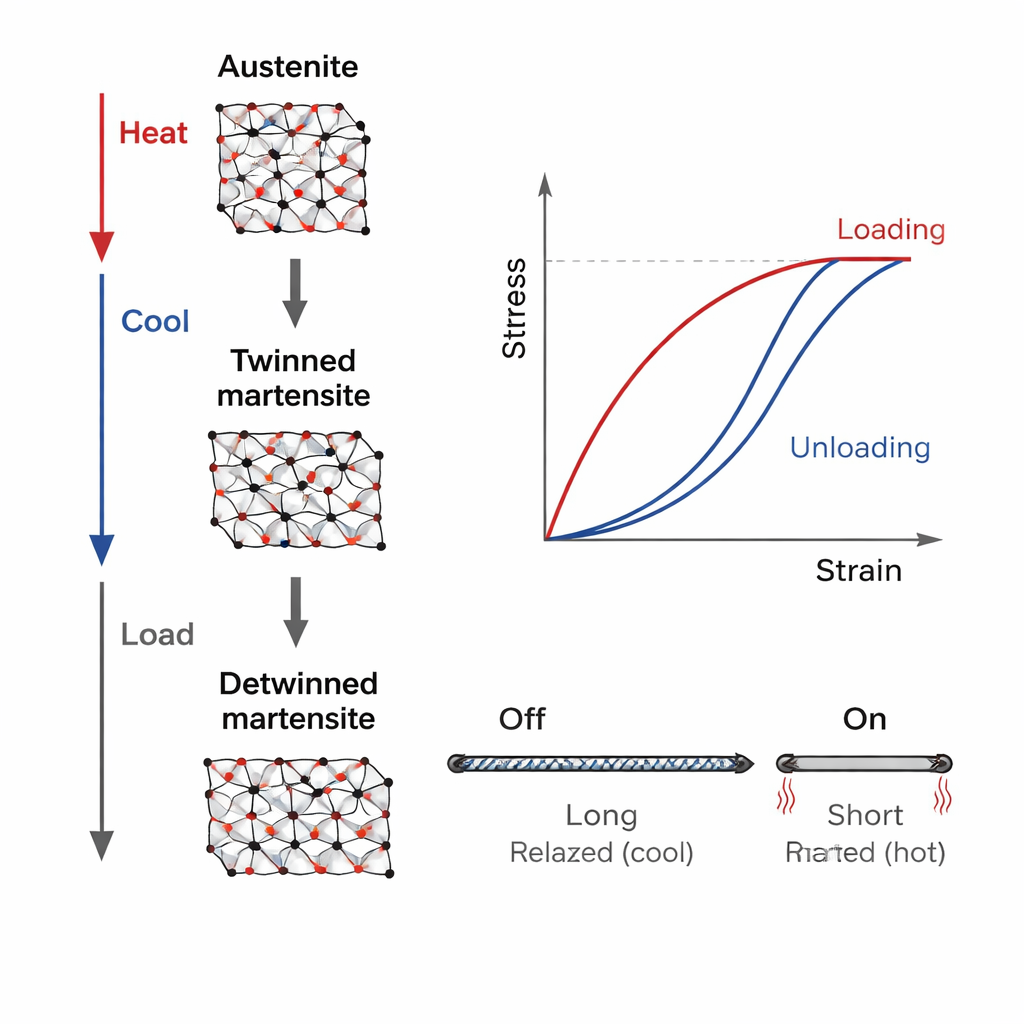
Vormenherinnerende legeringen zijn speciale metalen die vervormd kunnen worden en vervolgens terugkeren naar een vooraf ingestelde vorm wanneer hun temperatuur verandert. In de ene modus, de zogenaamde shape memory-effect, kun je de draad buigen wanneer deze koel en relatief zacht is; bij verwarming veert hij terug naar zijn oorspronkelijke vorm. In een andere modus, superelasticiteit, kan de legering onder belasting uitrekken en vervolgens terugveren zodra de belasting wegvalt. Binnenin het metaal ontstaat dit gedrag door vaststof–vaststof fasediagramwisselingen tussen verschillende kristalstructuren, wat zijn respons sterk niet-lineair maakt en enigszins moeilijk te voorspellen. Omdat SMA-draden dun zijn, kunnen ingenieurs ze meestal als eendimensionale elementen behandelen, waardoor wiskundige modellen die temperatuur, spanning, rek en elektrische stroom koppelen worden vereenvoudigd.
Van vergelijkingen naar data-gedreven modellen
Om deze slimme draden betrouwbaar te gebruiken, hebben ontwerpers modellen nodig die voorspellen hoe hard ze kunnen trekken, hoe ver ze bewegen, hoe heet ze worden en hoe hun elektrische weerstand verandert. Klassieke "constitutieve" modellen behandelen de draad als een massief materiaal en volgen hoe de interne fasen veranderen met spanning en temperatuur. Deze modellen zijn efficiënt maar steunen op vereenvoudigende aannames. Tegelijkertijd gebruiken onderzoekers steeds vaker machine learning en neurale netwerken om het gedrag van de draad direct uit experimentele gegevens te leren, waardoor subtiele hysterese- en historie-effecten worden vastgelegd. Een andere belangrijke onderzoekslijn onderzoekt hoe de elektrische weerstand en temperatuur van de draad evolueren tijdens stroomgestuurde verwarming, wat zelf-sensing mogelijk maakt — het vermogen om kracht of beweging te schatten alleen door weerstand te meten in plaats van extra sensoren toe te voegen.
Beweging bouwen: eenvoudige belastingen, zachte structuren en kunstspieren
Aan de hardwarekant ordent het artikel draadgebaseerde SMA-actuatoren naar de manier waarop ze worden belast. In de eenvoudigste "lineaire belasting"-opstellingen trekt een draad tegen een veer of gewicht om grijpers of ruimtevrijgave-mechanismen aan te drijven. Geavanceerdere "niet-lineaire belastings"ystemen (systemen met niet-lineaire belastingen) verwerken draden in flexibele balken, zachte polymeren, textiel of origami-achtige structuren om grote buigbewegingen, kruipende robots en geweven exoskelet-handschoenen te realiseren. Differentiele configuraties gebruiken twee of meer tegengestelde draden, die paren van spieren zoals biceps en triceps nabootsen, om snelle, omkeerbare beweging in gewrichten zoals kunstmatige ellebogen en enkels te bieden. Omdat een SMA-draad slechts ongeveer 8% kan inkorten, is een belangrijk ontwerpthema slagvergroting: lange draden rond katrollen winden, ze in gebogen paden rangschikken, modulaire schuif- of roterende stadia gebruiken, of SMA-veren toepassen om grotere bewegingen te bereiken in beperkte ruimtes.
De slimme draden gehoorzamen leren
Het besturen van deze actuatoren is uitdagend omdat hun respons afhangt van zowel temperatuur als mechanische historie. Het artikel bespreekt een spectrum aan besturingsstrategieën, van klassieke PID-regelaars tot meer verfijnde schema's. Modelgebaseerde benaderingen gebruiken fysica-afgeleide vergelijkingen of hysteresemodellen om sliding-mode-regelaars en feedforward-compensatoren te ontwerpen die niet-lineariteit tegengaan. Neurale-netwerk- en reinforcement-learning-regelaars gaan verder en leren hoe ze de draad moeten aansturen voor nauwkeurige beweging zonder te vertrouwen op perfecte modellen. Tegelijkertijd gebruiken zelf-sensing bestuurlijke methoden de veranderende weerstand van de draad als ingebouwd terugkoppelingssignaal, soms gecombineerd met neurale netwerken, om positie of kracht te schatten zonder omvangrijke externe sensoren.
Toepassingen in de echte wereld en toekomstige richtingen
Draadvormige SMA-actuatoren drijven al zachte robotgrijpers aan, kleine kruiprobots, vormveranderende vliegtuigvleugels, satellietloslaapparaten, implanteerbare pompen en stents, hartondersteunende omhulsels, compressiekleding, exoskeletpakken en rehabilitatiehandschoenen. In al deze velden blijven gemeenschappelijke hindernissen bestaan: langzaam afkoelen en warmteophoping, vermoeiing over vele cycli, complexiteit van besturing en productiekosten. De auteurs stellen dat vooruitgang zal afhangen van de integratie van drie lijnen: betere multiscale en data-verrijkte modellen, slimmere structurele ontwerpen die SMA's combineren met flexibele elektronica en multifunctionele materialen, en intelligente besturingsstrategieën die zich online aanpassen. Zij voorzien verenigde "modellering–ontwerp–besturing"-kaders, ondersteund door digitale tweelingen en machine learning, die deze aspecten samen co-optimiseren. Voor de leek is de boodschap dat deze vormveranderende draden uitrijpen van laboratoriumcuriositeiten tot praktische kunstspieren, met het potentieel om machines, medische apparaten en draagbare systemen in de komende jaren geruisloos te hervormen.
Bronvermelding: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Trefwoorden: vormherinnerende legering, zachte robotica, slimme actuatoren, vormveranderende structuren, draagbare apparaten