Clear Sky Science · ja
ベクトル記号アーキテクチャによる脳に着想を得た確率的占有グリッドマッピング
世界をパッチワークとして見るロボットたち
自動運転車、倉庫用ロボット、家庭用掃除ロボットはいずれも、自分の周囲を素早く頭の中で描く必要があります:どこが物体でどこが空間で、どこがまだ不確かか。本論文は、占有グリッドと呼ばれるその図をロボットが構築する新しい方法を提示します。脳が情報を表現する可能性から着想を得ており、マップの精度を保ちながら計算をはるかに高速かつ効率的にすることを目指しています。
生のセンサ信号を世界地図に変える
ロボットは移動しながらレーザースキャナや距離センサで世界を探り、物体の位置や空き領域の点群を収集することが多いです。古典的な手法である占有グリッドマッピングは、環境を画面のピクセルのような小さなセルに分割し、それぞれが占有されている確率を割り当てます。従来の方法はこの問題を重い統計的問題として扱い、不確かさを慎重に追跡しますが、多くの時間とメモリを消費します。近年のニューラルネットワーク手法は高速で隙間を埋められますが、ブラックボックス的で安全性が重要な場面では信頼しづらく、通常は新しい環境ごとに再学習が必要です。
脳に触発された中道
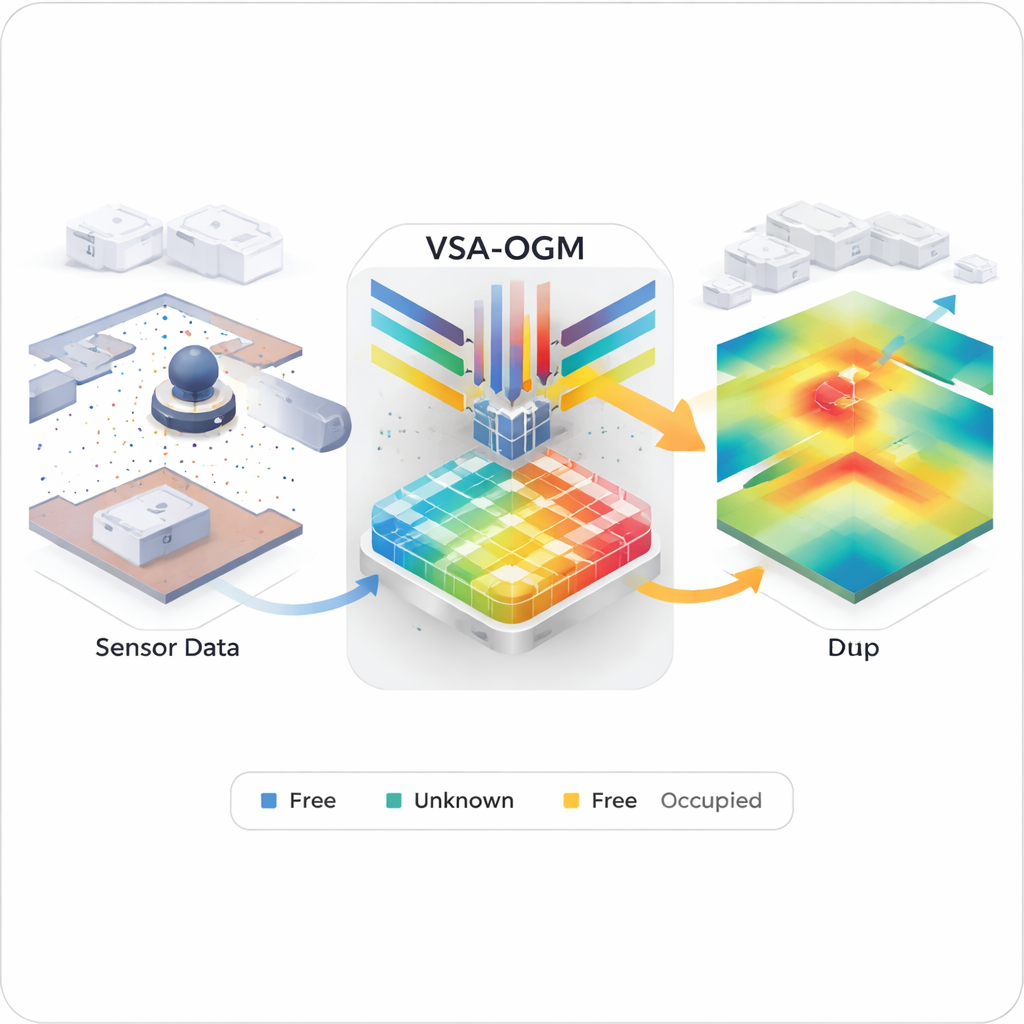
著者らはVSA-OGM(ベクトル記号アーキテクチャ占有グリッドマッピング)と呼ぶ「ニューロシンボリック」な妥協案を提案します。細かい情報を密なグリッドにすべて保存したり、構造を何百万ものニューラルネットワーク重みに埋め込んだりする代わりに、この手法はセンサの観測を高次元空間の非常に長いベクトルとして符号化します—これはニューロン群が概念や位置を表現する方法に関する理論に触発された数学的な発想です。環境はタイルに分割され、各タイルは「占有」と「空」の証拠のためのベクトル記憶を持ちます。ロボットが移動して点群を収集すると、各観測はこれらの高次元ベクトルの一つに変換され、適切なタイル記憶に束ねられ、効率的に情報が時間とともに蓄積されます。
ノイズだらけのベクトルから鮮明な地図へ
もちろん、多数の信号を一つの高次元記憶に束ねると、ノイズが混ざった読み取りにくい塊になるリスクがあります。VSA-OGMは巧妙に設計されたデコードパイプラインでこれに対処します。まず、タイル記憶を空間内の位置を表すベクトルと比較し、占有に対する粗い「準確率」を生成します。次に一連の非線形処理と情報理論の手法であるシャノンエントロピーを適用し、どこでデータが一方のクラスを強く支持しているかを抽出します。最後にソフトマックス関数でこれらの信号を真の確率に変換し、「占有」と「空」の符号付き差分を示す最終的な地図に統合します。その結果、観測がまばらな領域を補間しながら、確率論的で解釈可能な滑らかな占有グリッドが得られます。
一台のロボットでも多数でも高速な地図作成
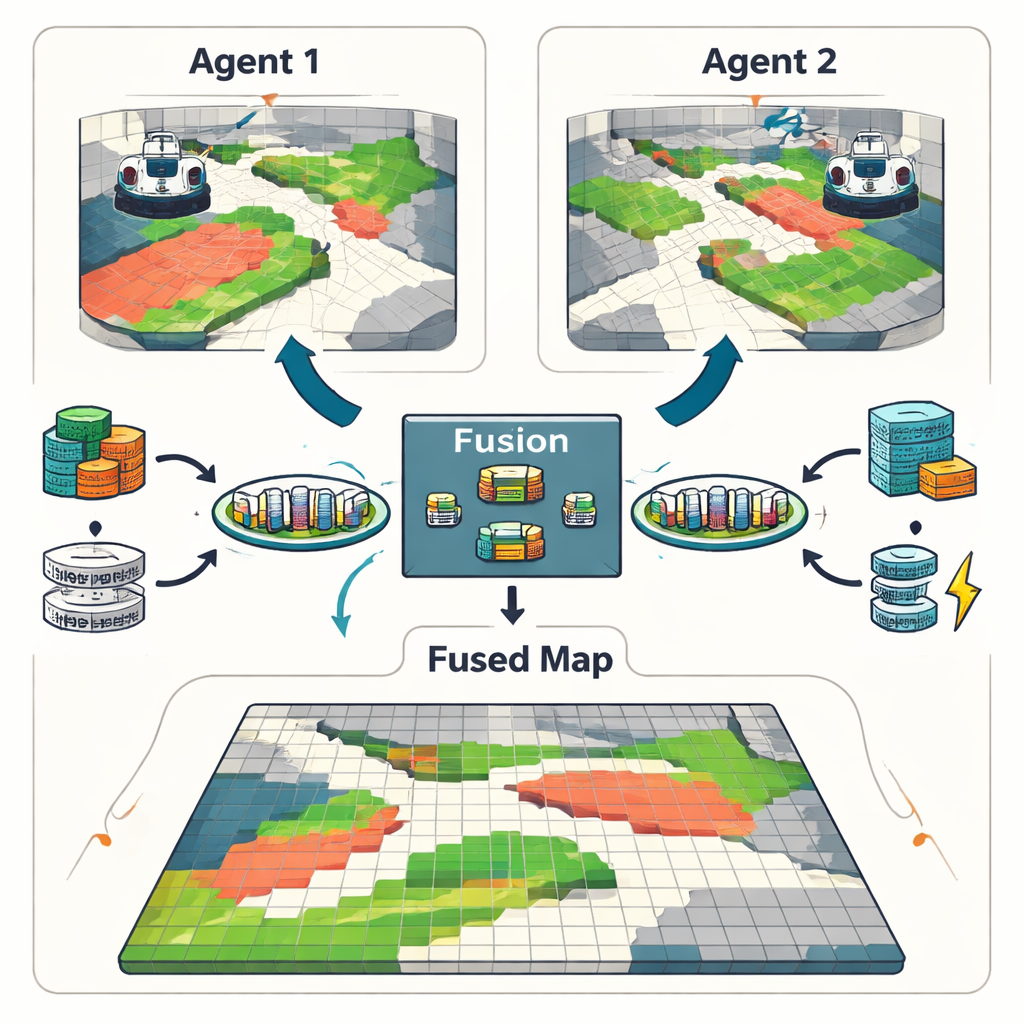
手法を検証するため、研究者たちは古典的な屋内ロボット地図や大規模な走行シナリオを含む複数のシミュレーションおよび実データセットでVSA-OGMを実行しました。空間相関を丁寧にモデル化する強力な従来手法と比べて、VSA-OGMは同等のマッピング精度を達成しつつ、メモリ使用量は約400分の1、実行速度は最大45倍速くなりました。統計的詳細を一部削る軽量な従来手法と比較しても、精度を維持しつつ遅延をおおよそ5分の1に削減しました。何時間もの学習と数百万のパラメータを必要とするニューラルネットワーク系と比べると、VSA-OGMは事前学習を必要とせず、フレーム当たりの処理時間を最大6倍短縮して同等のマッピング品質を提供しました。フレームワークは複数ロボットにも対応しており、異なるエージェントのベクトル記憶を単純に足し合わせることで、情報損失の少ない融合マップが得られます。
日常のロボットにとっての意味
簡単に言えば、この研究はロボットが世界の地図を作る際に、遅いが信頼できる数学と高速だが不透明なニューラルネットワークのどちらかを選ぶ必要はないことを示しています。脳に触発された高次元ベクトルを用いることで、VSA-OGMは古典的手法の明瞭な確率構造を保ちながら、限られたハードウェア上でのリアルタイム運用に必要な速度と効率を実現します。極端にデータが偏る場合や非常に密な環境の扱いなど、まだ課題は残りますが、このアプローチは控えめなオンボードコンピュータで動作しても安全かつ確実に周囲を理解できる将来のロボットを指し示しています。
引用: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
キーワード: 占有グリッドマッピング, 自律ロボット, ベクトル記号アーキテクチャ, 確率的マッピング, LiDARセンシング