Clear Sky Science · ja
連続運動の階層的遂行に関する行動学的証拠
単純な動作を滑らかな行為に変える脳の仕組み
キーボードのタイピングやピアノのスケール演奏、テーブル上の複数の物を手で取るといった日常的な動作は、何気なくスムーズに感じられます。しかしその裏側では、脳は多数の小さな動きをつなげて滑らかで協調的な行為を作り上げなければなりません。本研究は一見単純な問いを立てます:脳は常にそうした動作の鎖を一続きの長い運動として計画するのか、それともより小さな構成要素の階層を使って段階的に組み立てるのか?
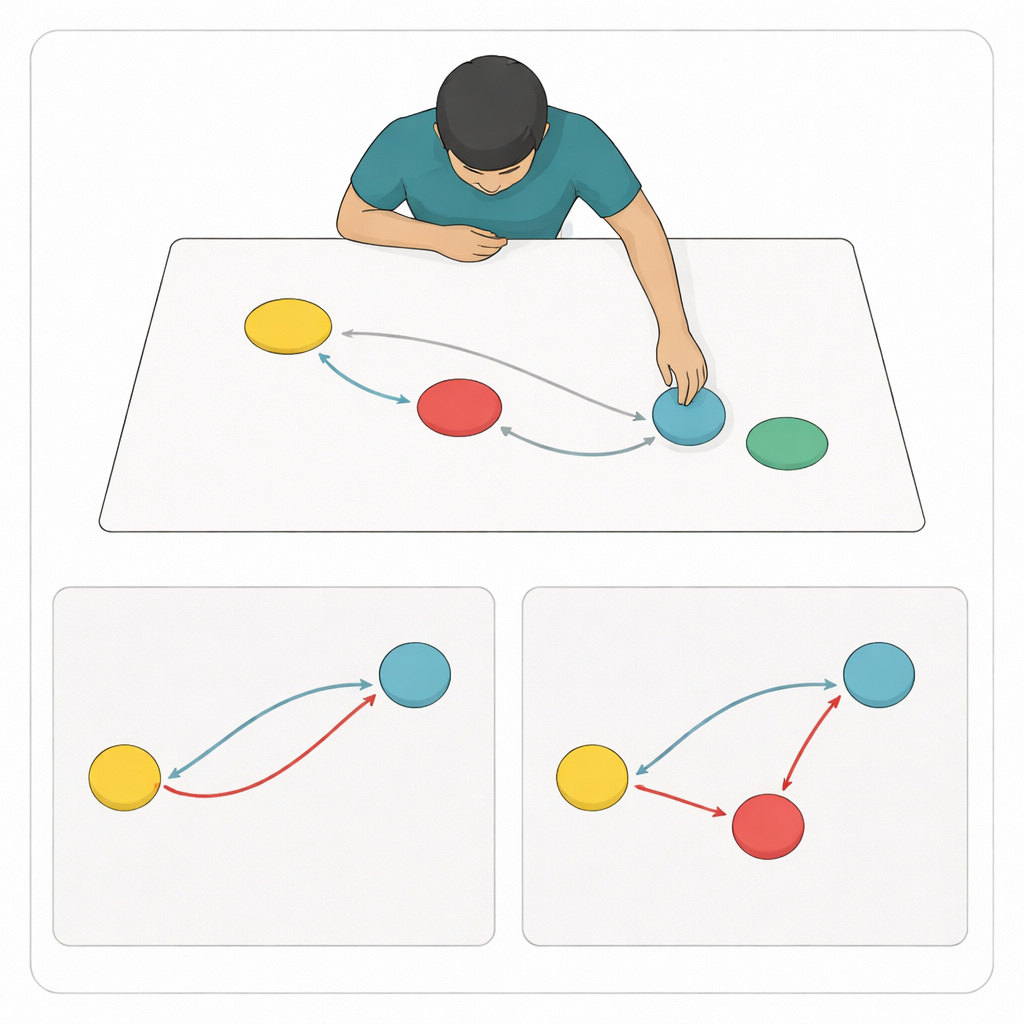
テーブル上の大きなターゲットへの到達
これを調べるために、研究チームは手のための“点つなぎ”のようなテーブルトップ・ゲームを設計しました。被験者20名が、テーブル面に印刷された複数の大きな色付き円の前に座りました。始点の円は体の近くにあり、他の円は左、右、上方に配置されていました。各試行で参加者は音を聞き、始点の円から指先を出発させて短いターゲット列を通り、また戻るように可能な限り速く動かなければなりませんでした。ただし非常に高い精度は求められず、指先が各円の内部のどこかに入れば十分でした。この低精度の設定は人々に速く流れるように動くことを促し、各ターゲットでピタリと止まるのではなく経路がターゲット間で曲がり混じることを許しました。
手の軌跡の湾曲から隠れた計画を読む
研究チームは、人々の所要時間や誤り頻度ではなく、各指先経路の正確な形状に注目しました。注目したのは2つの主要な特徴です。第一に「途中での曲がり(midway bending)」:ターゲットに到達する前に経路が次のターゲットの方向にどれだけ向かっているか。第二に「ターゲット付近での方向転換(turning around a target)」:ターゲットの近くを通過して方向を変える際に経路がどれほど鋭くまたは滑らかに曲がるか。これらのパターンは、あるターゲットへの動きがすでに次のターゲットを考慮に入れているかどうかを示します—これは「共調音(coarticulation)」と呼べる現象で、発話時に口が次の音に備えて形を変えるのと似ています。科学者たちはこうした測定された曲線を、最適制御の確立した理論に基づく2つの運動計画モデルによって生成される経路と比較しましたが、それらは内部構造が異なっていました。
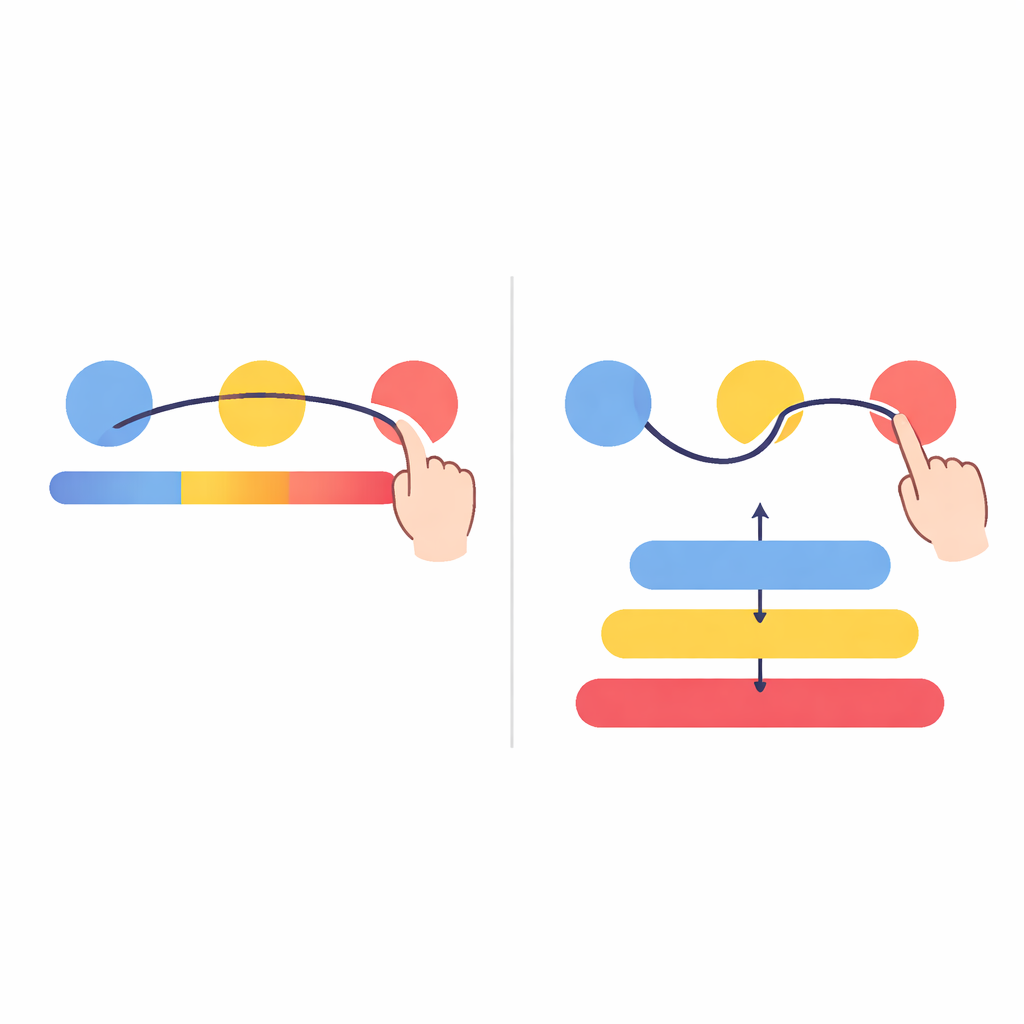
フラットな計画と層状の計画
「フラット」モデルでは、脳は手が動き出す前に3ターゲット全体のシーケンスを単一の統一された軌跡として計画すると想定されます。これは完全に記憶されたジェスチャーや一度で実行される“チャンク”に似ています。この場合、途中での曲がりとターゲット付近での方向転換は強く結びついています:一旦プランナーが最初のターゲットへの狙いの強さを決めると、シーケンス全体にわたる曲線の見え方は大部分固定されます。対照的に「階層的」モデルは、より小さな部分—例えば2ターゲットの動きと単一ターゲットへの戻り—をその場でつなぎ合わせる簡単な中間層を加えます。別個の動的システムがいつサブムーブメントから次へ切り替えるかを決め、各ターゲット付近の形状を比較的独立に調整しつつ全体の動きを滑らかに保つことを可能にします。
階層的に見える行動
多数のシミュレーションを実行したところ、フラットモデルは人間の参加者が自然に示した一部の途中での曲がりと方向転換の組み合わせを再現できないことが分かりました。特に、参加者はしばしば動作の前半で二番目のターゲットに強く曲がり寄せながらも、その二番目のターゲット付近では鋭い、あるいは異なる形状の曲がりを示すことがありました—これはフラットなプランナーでは一致しませんでした。しかし階層的モデルは、中間ターゲットで別々の“サブムーブメント”を動的に連結することで、こうした混合した挙動を再現できました。実データを両モデルと比較した結果、記録された動作シーケンスのほぼ半数は明確に階層的な説明を必要とし、残りはフラットな計画と整合するものもあり、被験者がシーケンスに応じて柔軟に戦略を切り替えていることが示唆されました。
日常的な技能にとっての意味
この発見は、長期の訓練や高度に習熟したルーチンがなくても、単純な到達をつなげる際に脳がしばしば層状の計画に依存していることを示唆します。運動系は常にシーケンスを単一の硬直したチャンクに圧縮するのではなく、再利用可能な運動パーツを手元に置き、それらをリアルタイムでつなげるようです。訓練が進むと、こうした連鎖は徐々によりフラットで完全に“チャンク化”された動作へと収束するかもしれず、それが技能が非常に速く自動的になるプロセスを説明する助けになります。本研究は運動を組織化する脳の仕組みに対する幾何学的な新しい窓を提供し、運動学習、リハビリテーション、同様に適応的な優雅さで動くロボットの設計に向けた将来研究の指針となり得ます。
引用: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
キーワード: 運動制御, 運動計画, チャンク化, 階層的行動, 連続到達