Clear Sky Science · ja
運動学的にアグレッシブな動作を可能にする具体的なマルチエージェント経路計画
交通の中を踊ることのできるロボットたち
想像してみてください。倉庫内を飛び回り走り回る何十台ものロボットが互いにぶつかることなく移動し、人間の操縦者よりも速く任務を終えていく光景を。本稿は、こうしたロボットの「交通」を振付ける新しい方法を説明します。多くの機体が狭い空間で素早く攻めるように動ける一方で、安全性も保たれるようにするのです。この研究は、同じ考え方が将来、工場や倉庫、配送サービスのロボット群を日常的に動かす基盤になりうる点で重要です。
多くのロボットをまとめるのが難しい理由
多数のロボットを協調させるのは、単体を操るよりはるかに難しい課題です。各ロボットは出発点から目的地まで、衝突せず、他を妨げず、無限ループに陥らずに到達しなければなりません。現在の手法は大きく二つの極に分かれます。格子状(グリッド)でロボットを単純な駒のように扱う方法は、数百台規模でも計画が速く数学的に扱いやすい一方で、実機の加速や旋回などの動力学的制約を無視しがちです。一方で、物理運動を完全にシミュレートして滑らかな軌跡を生成する方法は美しい結果を出しますが、ロボット数が少し増えるだけで計算が極端に遅くなったり信頼性が落ちたりします。
中間の道:「コンクリート」な計画
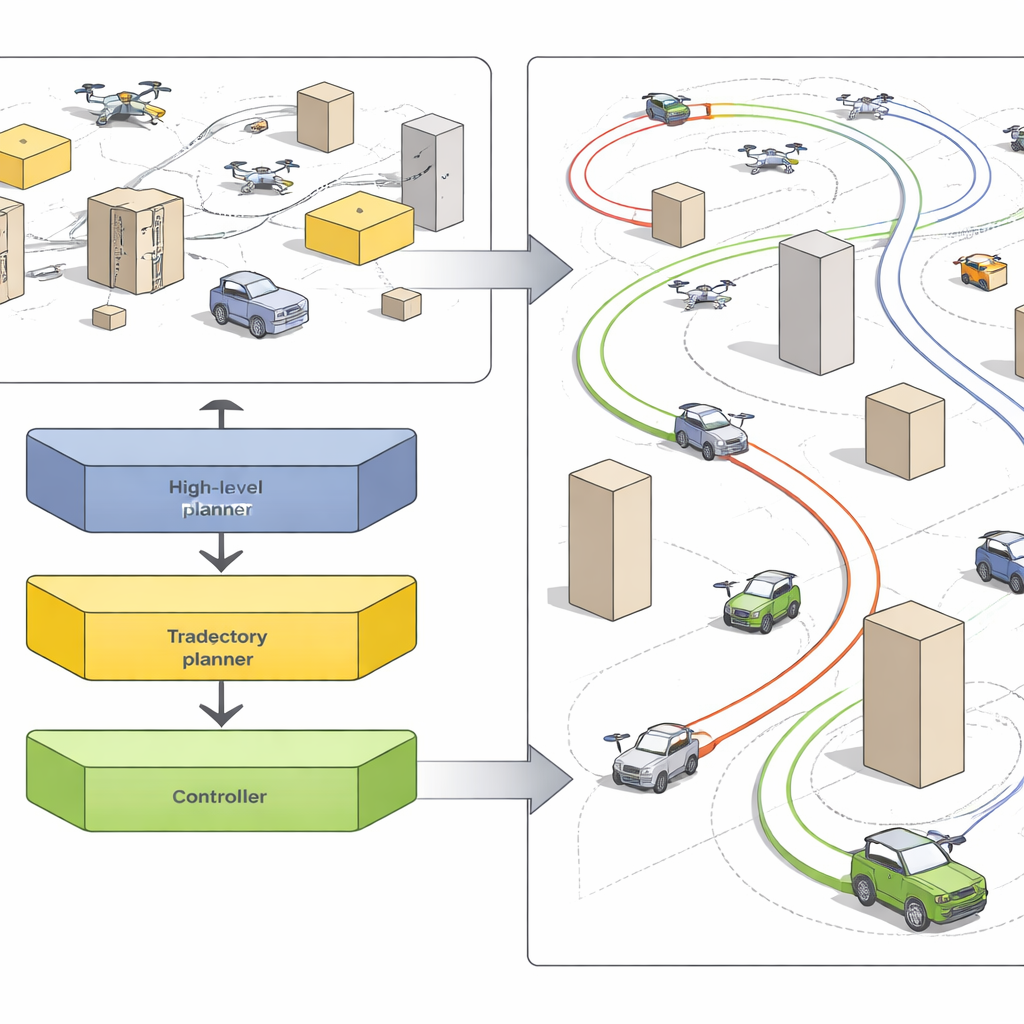
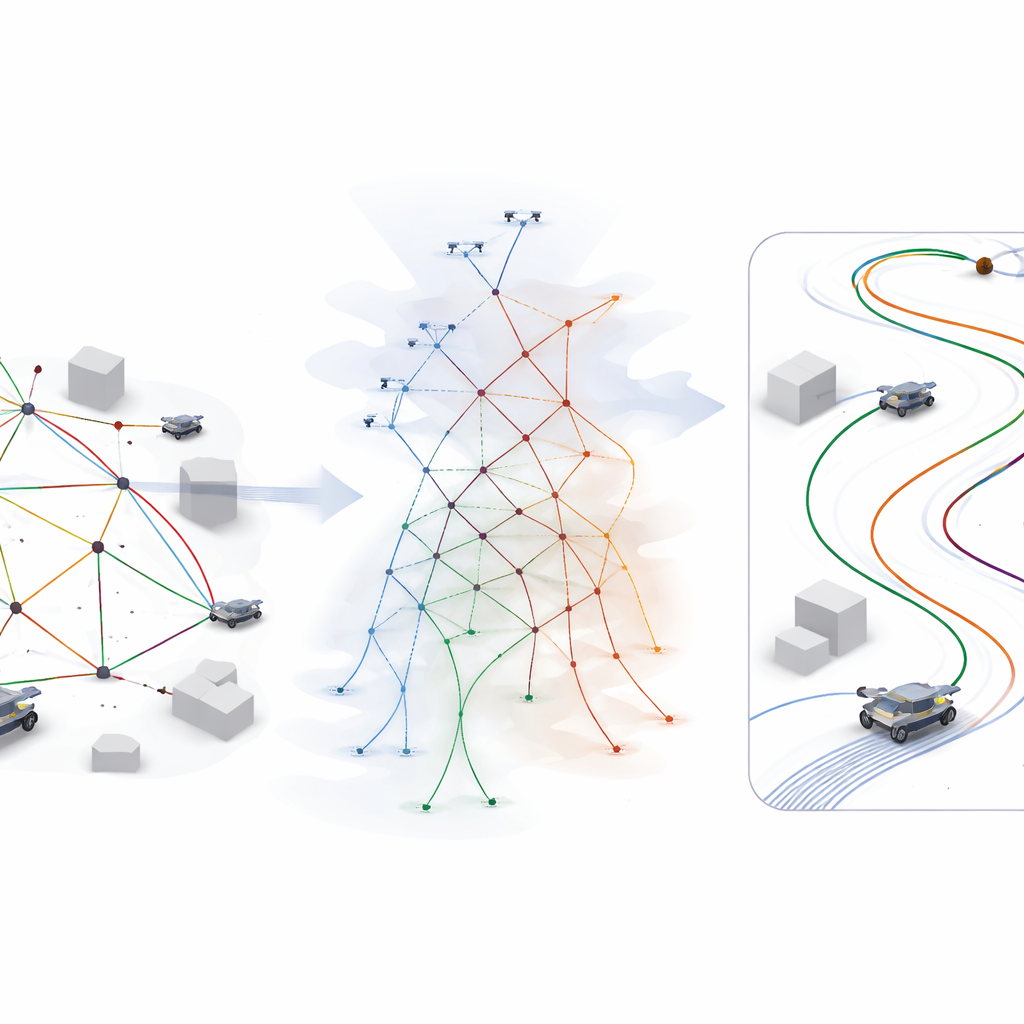
著者らは「コンクリート(具体的)」なマルチエージェント経路計画と呼ぶハイブリッド戦略を提案します。考え方は、グリッド型計画の明快さとロボットの実際の動きを表す現実的な描像を融合することです。純粋に抽象的なグリッド上で動くのでもなく、完全な連続物理で扱うのでもなく、運動を多層的に記述します。中央のプランナーは全ロボットの可能な離散的移動の集合を探索しますが、各移動には所要時間、意図した線からのぶれ、他者を安全にすれ違える近接度などの予測が付与されます。これらの予測は実ロボット実験から学んだデータ駆動モデルに由来し、プランナーは実際の運用で艦隊がどのように振る舞うかを“知っている”のです。
粗いスケッチから精密な運動へ
結合されたプランナーが各ロボットに対して安全で衝突のないウェイポイント列を生成したら、フレームワークは詳細化に移ります。第二のモジュールが、それぞれの粗い経路を推力や操舵などの物理的制約を満たす密で滑らかな軌跡へと変換します。これを高速に行うため、著者らはまずオフラインで重い数値最適化を用いて時間最適に近い多くの運動例を生成し、次にそれらを模倣するトランスフォーマーベースのニューラルネットワークを訓練しました。実行時には、これらのネットワークがミリ秒未満で高品質の参照経路を生成できます。第三の層は安全フィルタ付きのモデル予測制御器で、参照に追従するよう制御を常に調整し、局所的な感知で迷い込んだ障害物やわずかな追従誤差といった不測の事態を回避します。
40台のロボットでの試験
チームは、20機のクアドロータードローン、8台の地上ロボット、12台の移動障害物を務めるロボット、計40台の混合艦隊を室内アリーナで同時に稼働させてシステムを実証しました。ある実験では、ドローン群が狭い空間を最大速度5メートル/秒超で飛び回りつつ三次元的なバレエのように互いを避け合ってレースを行いました。また別の実験では、地上ロボットが乱雑な領域をランダムに動く障害物を避けながら何度も横断し、競合手法よりも多くの任務を、少ない停止回数で、衝突なしに達成しました。最も負荷の高い試験では全40台が連続して複数のミッションを実行し、システムはデッドロックや衝突なく要求に応じて経路を継続的に再計画しました。
将来の配送・倉庫システムへの示唆
これが実世界のタスクにどう応用できるかを示すため、著者らは模擬の「ラストマイル」配送や倉庫作業を演出しました。配送シナリオでは、地上ロボットがドローンを「川岸」まで運び、ドローンは離陸して散在する投下地点へ飛行し、基地に戻ってから移動基地に載せられて出発点へ戻る、という流れを移動障害物を避けつつ行いました。倉庫の模擬では、ドローンチームが棚と受渡しゾーンの間で仮想荷物を何度も運び、高密度で機敏な動きと高スループットを維持しました。これらのケーススタディではフレームワークの微調整は最小限で済み、新しいプラットフォームやミッションへの適応性の高さが示されました。
今後への意味合い
平たく言えば、この研究は大規模なロボットチームが、迅速な高レベル計画、現実的な運動モデル、そして最終手段の安全チェックを慎重に組み合わせることで、狭く変化する空間で大胆かつ安全に動けることを示しています。「コンクリート」なアプローチは抽象的な計画を実機が高速で実行可能な動きに変換すると同時に、多くの実用的な状況で衝突やデッドロックに対する保証も提供します。極端に混沌とした環境やまったく未知の空間は依然として難題ですが、このフレームワークは配送ドローンや倉庫作業ロボットといった艦隊が常時人間の監督無しに混雑した環境を共有できる未来に向けた道筋を示しています。
引用: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
キーワード: マルチロボット協調, 経路計画, ロボット群, 倉庫の自動化, ドローン配送