Clear Sky Science · ja
嗅覚感覚欠損に対する昆虫由来の適応的行動補償戦略によるロボットの臭源局在化
センサーを失っても匂いの跡を失うわけではない理由
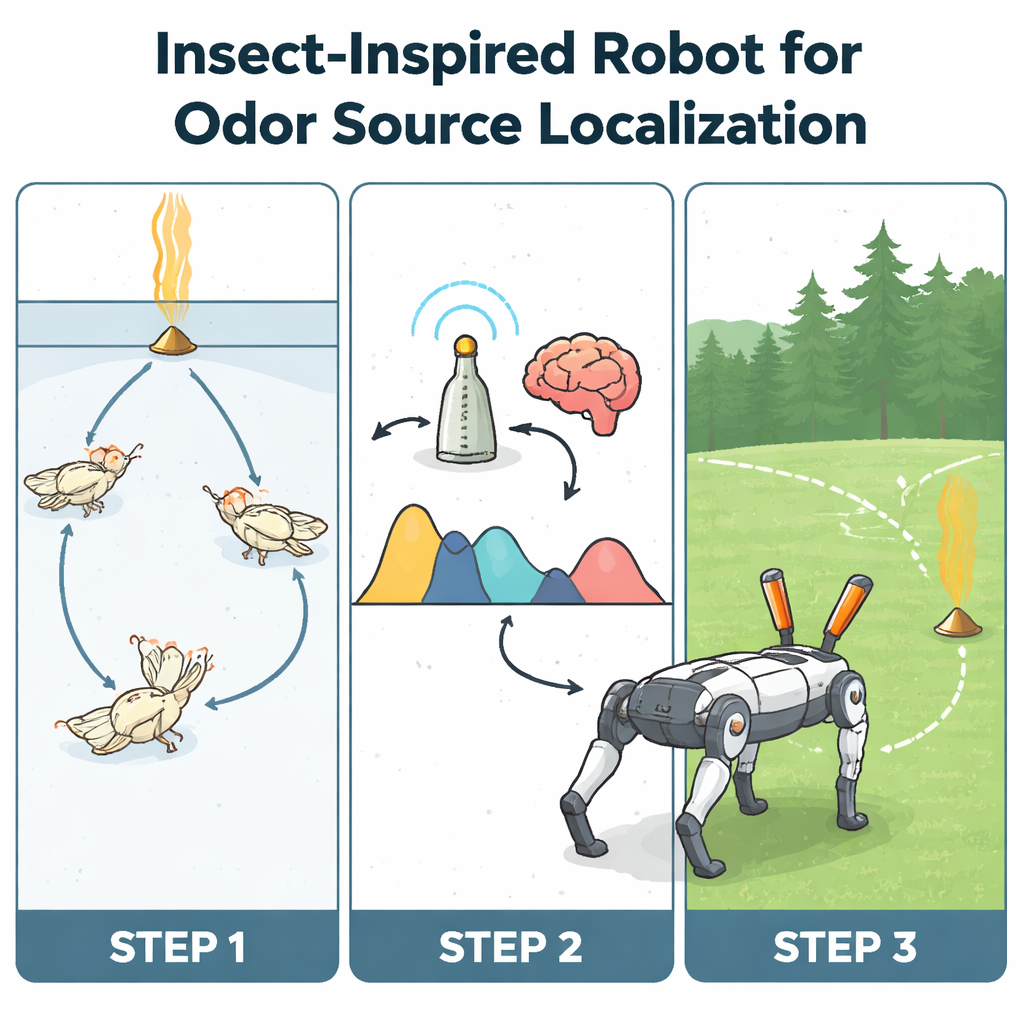
倒壊した建物の中でガス漏れや閉じ込められた生存者を嗅ぎ分けようとする捜索救助ロボットが、重要なセンサーの一つを壊してしまったと想像してください。現在のロボットはその種の損傷に対して脆弱なことが多いです。本研究は、匂いに基づくナビゲーションの意外な専門家であるオオカイコガ(雄)に着想を得て、動物が「鼻」の半分を失ってもどのようにして臭源を追い続けられるか、そしてその戦略を四足ロボットにどのように応用できるかを示します。
小さな航法者が持つ強力な嗅覚
昆虫から犬に至るまで、多くの動物が空中の化学信号を使って餌や交尾相手、安全な避難場所を見つけます。視界が暗闇、煙、瓦礫で遮られているとき、匂いは特に有用です。しかし現実の臭いの筋(プルーム)は乱れます:風向が変わり、建物や樹木が流れを曲げ、最も強い匂いが必ずしも発生源の真上流にあるとは限りません。ほとんどの匂い探索ロボットは全ての嗅覚センサーが正常に働き、匂いと風の方向がきれいに一致すると仮定していますが、自然界ではどちらの仮定も成り立ちません。カイコガ(Bombyx mori)の雄はその対例を提供します:雄は乱流下でもフェロモンを放つ雌を見つけられ、興味深いことに二本ある触角のうち一本を失っても追跡を続けられます。
触角を失ったあと蛾はどう対処するか
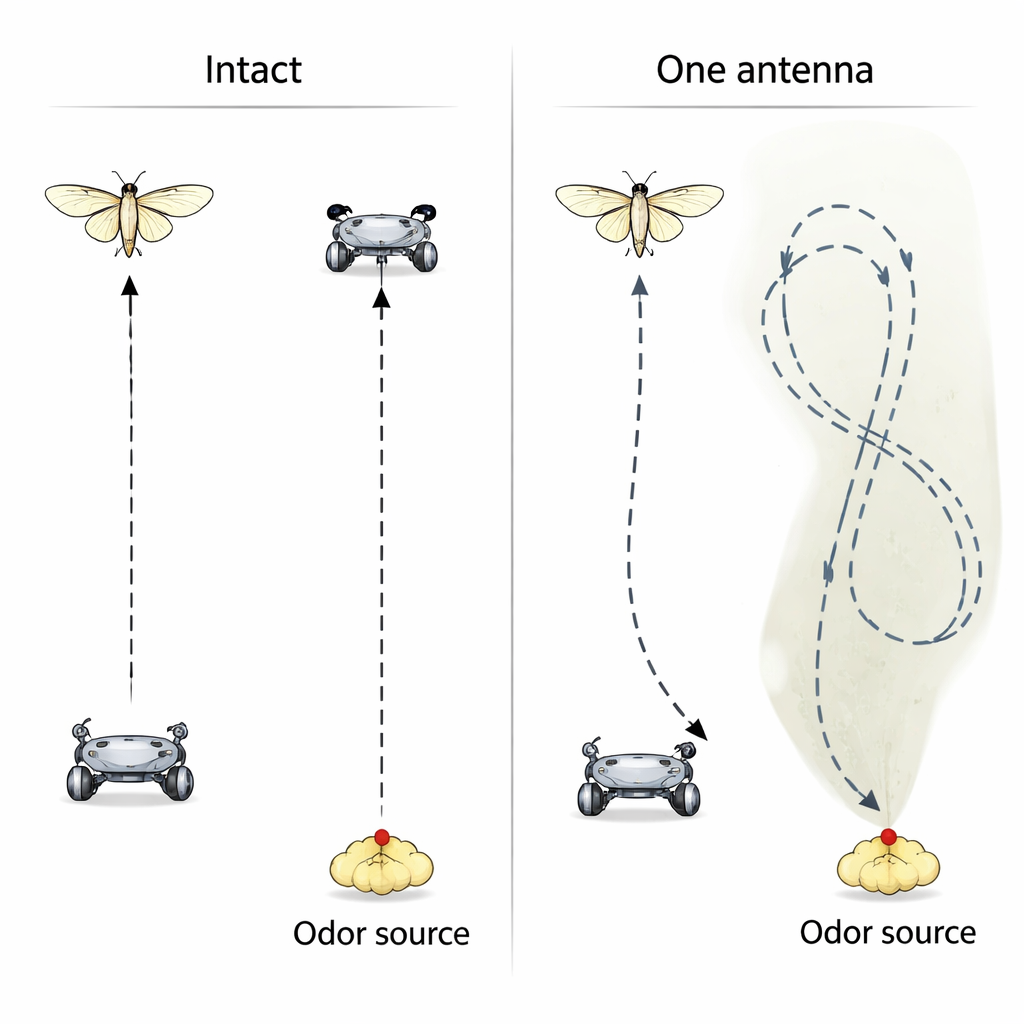
研究者たちはまず、左右両方の触角がある雄のオオカイコガと左触角を切除した個体が、実験室で臭源にどれほどよく歩いて到達できるかを検証しました。両群ともにフェロモンを放つ点から15センチ離れた場所から開始しました。驚くべきことに、成功率(1分以内に臭源に到達する確率)は触角を一方失っても有意に低下しませんでした。変わったのは経路です:触角が両方ある個体は比較的直線的に進む傾向があったのに対し、片触角の個体は時間がかかり、より曲がりくねった経路をたどり、残った触角の側へ曲がる傾向がありました。頭部運動を詳細に測定すると、匂いが残った触角のどの位置(基部か先端付近)で検出されたか、そしてそのときどちらに回っているかによって、蛾が回転戦略を切り替えていることが明らかになりました。
複雑な行動に隠された二つの単純なルール
研究チームは左と右から繰り返し匂いをパルス状に与え、蛾の頭角度を追跡することで、各パフの後に蛾が左または右に曲がる確率を示す確率曲線に行動を変換しました。匂いが触角の基部付近で当たると、蛾は同じ側への回転を続けることを強く好み、実質的に現在の曲がりを維持する選択をしました。匂いが先端付近で当たると、選択はより均衡し、反対側を探索するわずかなバイアスが生じました。簡潔に言えば、触角を失ったからといって蛾が諦めるわけではなく、特に匂い強度が急変する「プルームの縁」をより幅広くサンプリングする探索パターンを採るようになるのです。
四足ロボットに蛾の嗅ぎ方を教える
次に研究者たちは、触角の基部から先端へと続く構造を模した嗅覚センサーを「頭部」に備えた四足ロボットを製作しました。二つの探索アルゴリズムを作成しました。第一は標準的な蛾着想の手法であるSZL(surge–zigzag–loop)で、左右の検出の時間差から直進する“サージ”方向を決める二つの正常なセンサーを仮定します。第二は文脈依存型蛾着想(CDMI)と名付けられ、先の蛾のルールを組み込んでいます:残ったセンサーのどの位置で匂いが検出されたかを推定し、動物実験から得られた確率曲線を用いてどちらに動き、どれだけ急に曲がるかを決めます。室内試験では、両方のセンサーが正常なときはSZLが最も良く、速く比較的直線的な経路を示しました。しかし一方のセンサーが無効化された場合、CDMIはSZLを明確に上回り、プルームの変動する縁に沿ってループ状の軌跡で源をより高頻度で見つけました。これは片触角の蛾の軌跡に類似しています。
故障しても賢さを保つロボット
このアイデアをさらに検証するため、チームは屋外試験も行いました。自然風と乱流により臭いのプルームは非常にパッチ状になります。正常なロボットには従来のSZLを、“一つのセンサー”ロボットにはCDMIを与えました。両者は同等の成功率を達成しましたが、触角相当のセンサーを失い蛾由来の適応戦略を採ったロボットは、しばしばより短く、寄り道の少ない経路で源を見つけました。これは、過酷な実世界条件では精密だが脆弱なセンシング方式から、より探索的で縁を追う戦略に切り替える方が実際に有利な場合があることを示唆します。広い意味では、堅牢なナビゲーションはより複雑な人工知能を際限なく積み上げる必要はなく、むしろセンサーの配置や身体と環境の相互作用に結び付いた単純で生物学的根拠のあるルールが、重要部品が故障しても動き続けられるロボットを生み出すのに役立つということです。長期の探査や救助ミッションにとってこれは重要な特性です。
引用: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
キーワード: 嗅覚ナビゲーション, 生物模倣ロボティクス, 臭源局在化, 昆虫に着想を得たAI, 具現知能