Clear Sky Science · ja
巧みな操作のための能動的な掌を備えた触覚反応型グリッパー
つかんだものを感じるロボット
熟したイチゴを優しく摘み取ったり、チャイルドプルーフのボトルのフタをひねって開けたり、頭上で電球をねじ込んだり――いずれも押しつぶしたり落としたり、位置をずらしたりせずに行えるロボットを想像してください。本論文は、機械に指先だけでなく能動的で高感度な掌を与えることで、人間のような繊細な手の技能に近づける新しいロボット用グリッパーを紹介します。
ただ保持するだけではない掌
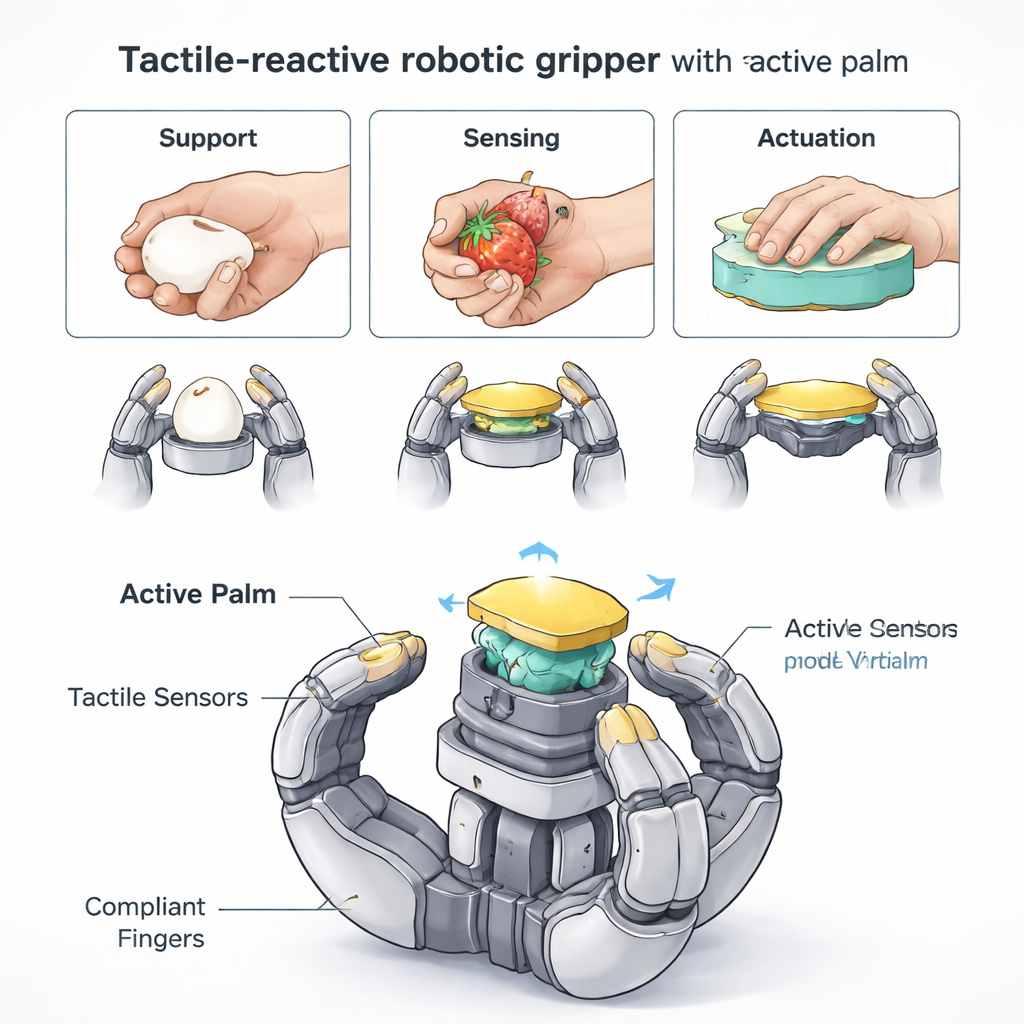
現在の多くのロボットハンドは、単純で硬い爪のような把持器か、構造が複雑で製作や制御が難しい多指型の手のいずれかです。本研究の重要な洞察は、人間の手が支持、感覚、押す動作において指だけでなく掌に大きく依存している点です。研究者たちは、上下に動く中央の掌を備え、カメラベースのタッチセンサーで覆われた三本指のロボットグリッパーを設計しました。各指先には柔軟な圧力検知パッドもあります。これらが組み合わさることで、グリッパーはどこでどのように物体に触れているかを感じ取り、実時間で把持を調整できます。しかも系全体はわずか七つの可動ジョイントで構成されています。
単純な動きで多様な把持
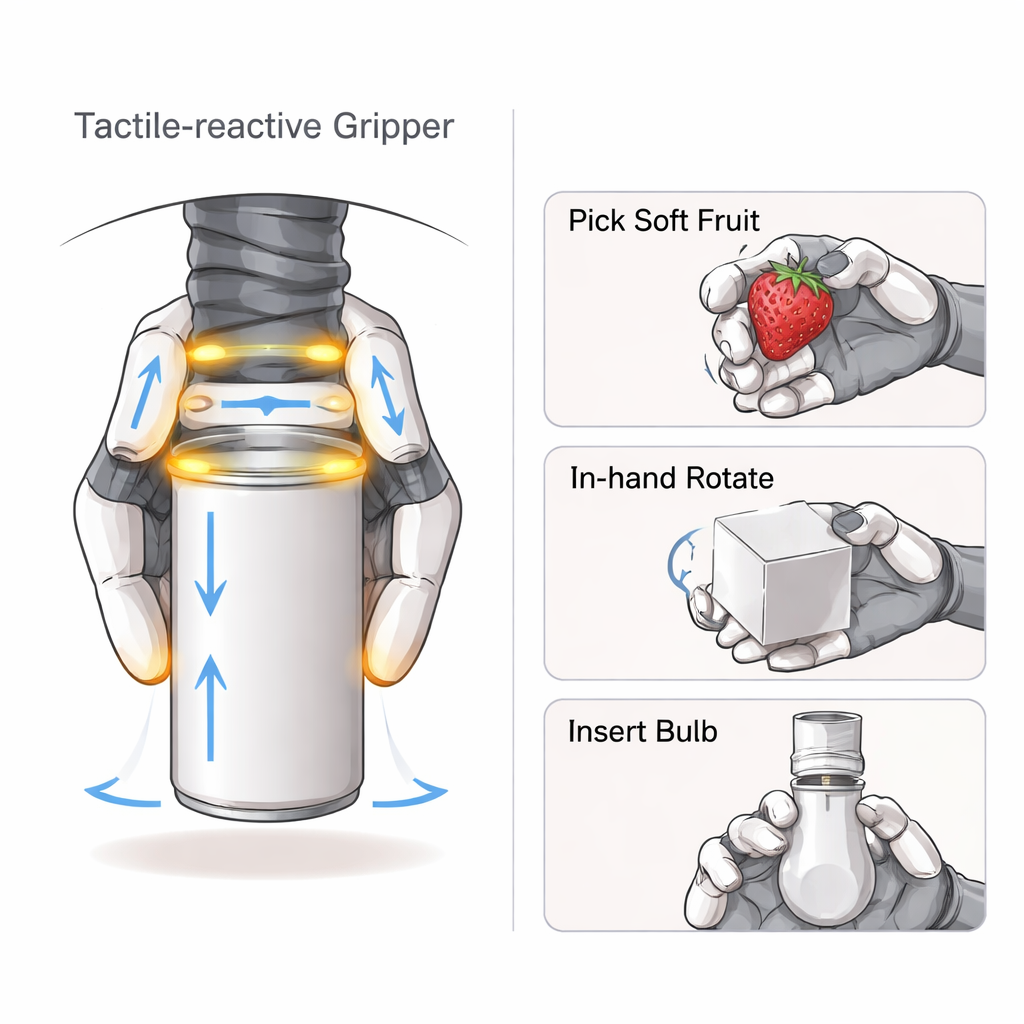
三本の同一の指は掃くように動き曲がることができ、球のような大きな物体を囲い込む、カードのような薄い物をつまむ、重い工具をパワーグリップで挟むといった日常的な把持様式をいくつも実現します。背骨のような柔らかい指構造は、詳細なプログラミングなしにさまざまな形状に自然に沿います。一方で掌は昇降するエレベーターのようにスライドし、物体に押し当てて指と荷重を分担したり、手の中で物体の位置をずらしたりできます。シミュレーションと実験により、各指に二つの関節と可動掌だけでも、物体を多方向に動かし、制御しにくい不利な姿勢を回避できることが示されました。
指と掌の両方で感じる
何を握っているかを把握するために、グリッパーは三種類のセンシングを組み合わせます:掌からの詳細な触覚画像、指先からの圧力マップ、そして自身の関節角度の読み取りです。機械学習システムがこれらの信号を融合し、対象物にとって有益な手がかりにより重みを置きます。飲料缶やさまざまなサイズ・材質の球を用いたテストでは、ほぼ99%の精度で把持物を認識できました。この豊かな触覚は、どれだけ強く握るべきか、指を閉じるのをいつやめるか、摩擦を大きくしすぎずに接触を安定させるために掌をどう動かすか、などの判断も導きます。
試験対象から果物や電球へ
研究チームは、球、工具、小さな金物部品など日常物を含む広く使われるロボット把持ベンチマークでグリッパーを評価しました。可動部を少なくしながら複数の著名な研究用グリッパーより高得点を記録しました。テストセットを越えて、グリッパーは壊れやすい果物――イチゴ、ブドウ、トマトなど――を目に見える痕を残さず摘むことができ、紫外線下で数日後も傷が確認されませんでした。さらに、ブロックや円筒を手の中で正確に平行移動・回転させたり、上向きのソケットに電球をねじ込んだり、銃底を持ちながら注射器のピストンを押したり、押してひねることでチャイルドレジスタントキャップを開けたりもできました。これら多くの作業で、可動掌が標準的な指だけのグリッパーに欠ける追加の押し、支持、あるいは感覚を提供しました。
将来のロボットにとっての意義
この研究は、ロボットが巧みになるために指や関節をただ増やせばよいわけではないことを示しています。少数の柔軟な指を能動的に制御され触覚センサーを備えた掌と綿密に協調させることで、このグリッパーは力強さ、繊細さ、そして認識力を兼ね備え、人間の手に近い特徴を獲得します。部品の多くが3Dプリント可能で市販のセンサーを使用しているため、設計は比較的再現しやすいです。さらに学習ベースの制御が進めば、同様のグリッパーは食料品の取り扱いや在宅ケアの支援、あるいは工場での人との安全な協働などで、行なっていることを確かめながら確実に作業を行う手助けになるでしょう。
引用: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
キーワード: ロボットグリッパー, 触覚センシング, 巧緻操作, ロボットハンド, 能動的掌