Clear Sky Science · ja
水中ソフトウィングにおける固有受容感覚の活用によるハイブリッド受動・能動的擾乱抑制
水中のスマートウィング
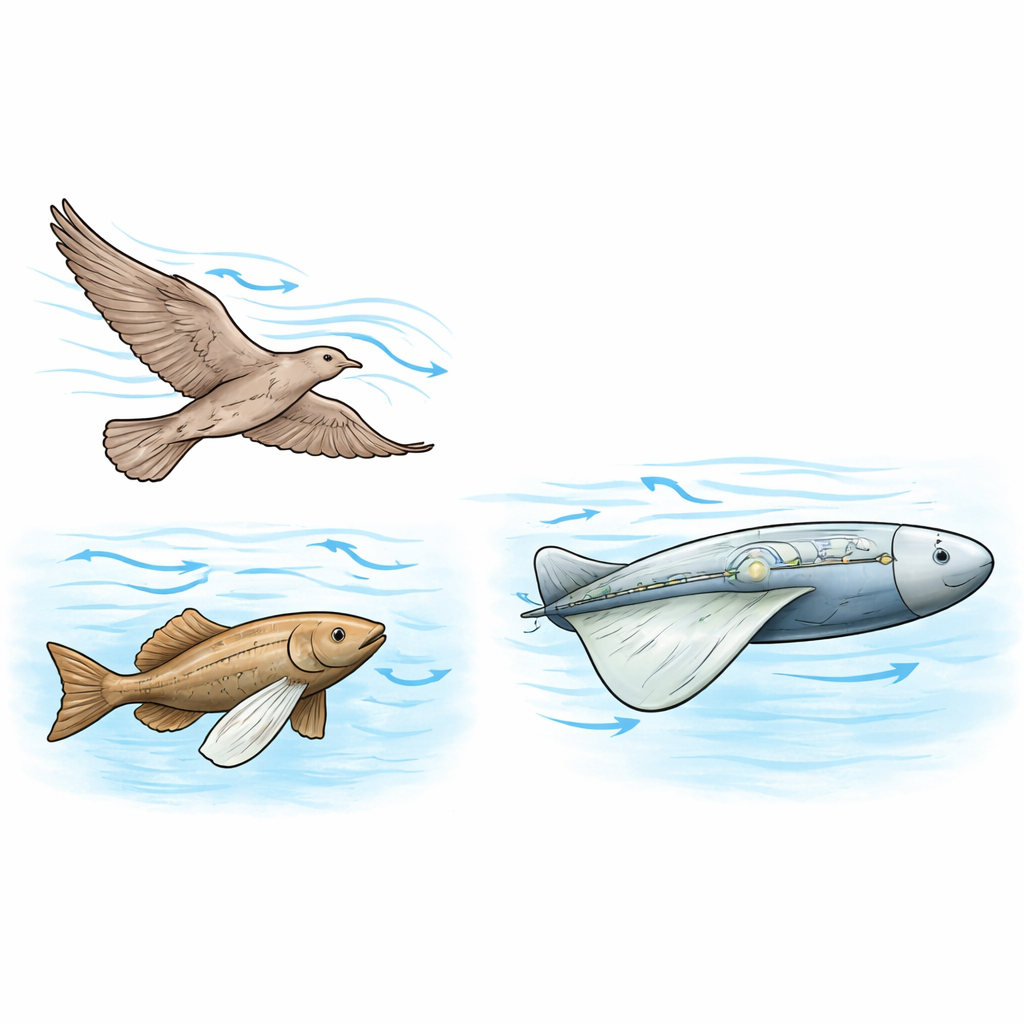
強い風の中でホバリングする鳥や流れの速い川で位置を保つ魚を見たことがある人は、周囲の流体が思い通りにならないときに進路を維持するという難しい工学的課題が自然によって解かれているのを目にしています。本研究は、動物の固有受容感覚に似た「自己感覚」を備えた新種の柔らかい水中用ウィングが、流れの急変を自動的に感知し、自ら形を変えて安定を保てることを示します。この成果は、堅い機械よりも動物のように滑空し、荒れた海況でもエネルギーを節約できる将来の水中ロボットへつながる可能性を示しています。
鳥や魚に学ぶ
自然界では、翼やヒレは剛直なブレードではなく、曲がり、ねじれ、しなります。鳥は羽毛の微細な受容器で空気の動きを感知し、魚は体表や鰭基部の圧力感受性細胞を使います。これらの内蔵センサーにより、動物は付属物が流体中でどのように変形するかを感知し、ほぼ瞬時に応答して突風や乱流を打ち消します。これに対して、多くの水中機体は剛性の高い制御面と流れを測る別個の計器を用いるため、環境が混乱すると反応が遅く消費電力も大きくなります。著者らは、柔軟性とセンシングを一体化したソフト構造がこの差を縮めうると主張しています。
感覚を内蔵したソフトウィング
研究チームは、柔らかく曲がる尾部と剛性のある前端を組み合わせた水中用の半翼を作製しました。柔らかい部分の内部には液体で満たされた可膨張のチューブが通っており、これを加圧することで翼の曲率、すなわちキャンバーを変えられます。外側にはシリコーンと液体金属配線で作られた薄い電子“スキン”を接着しました。翼が曲がると埋め込まれた導体間の間隔が変わり、電気容量が変化します。カメラで追跡した形状とこれらの信号を対応づける簡単な機械学習モデルを訓練することで、研究者たちはこの電子スキンを高精度の形状センサーに変えました。一度訓練されれば、このシステムは外部カメラなしで、水没下でもリアルタイムに翼のキャンバーを推定できます。
形状を制御へと変換する
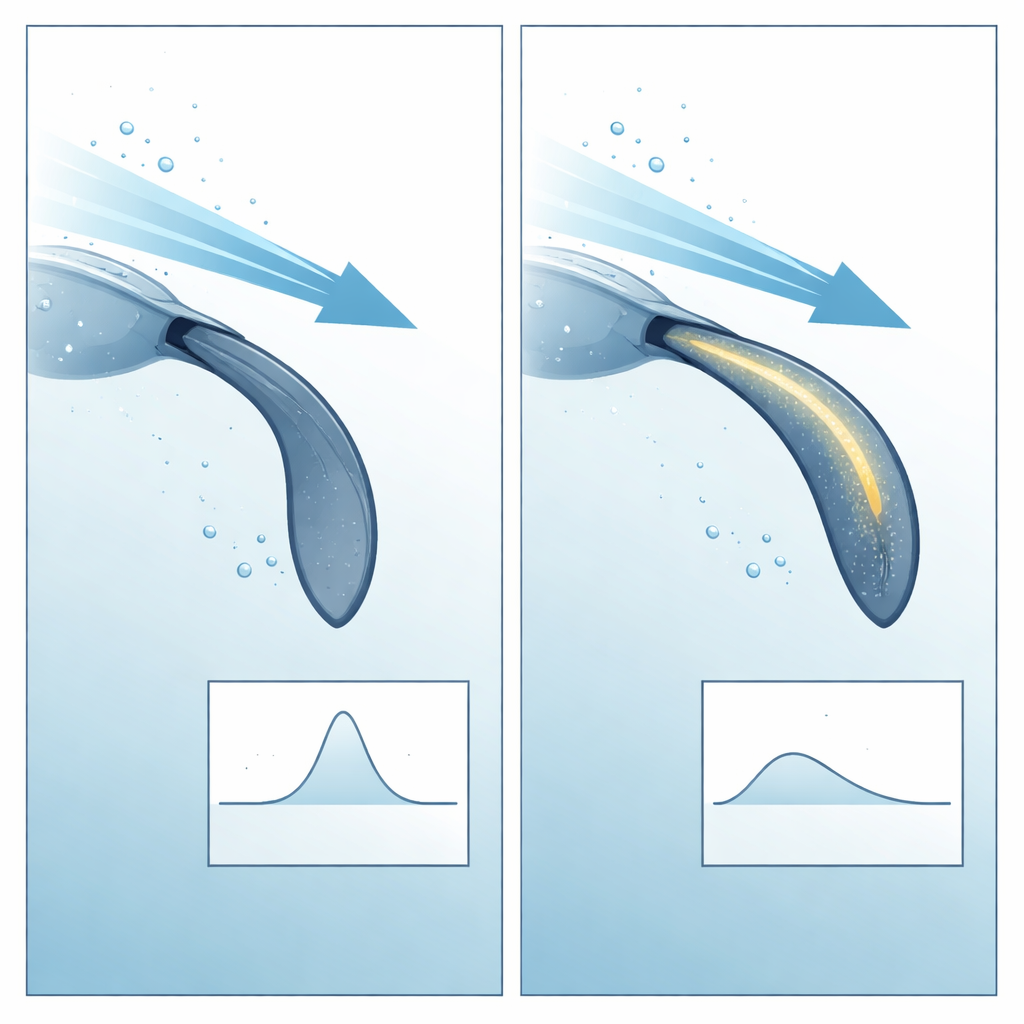
この固有受容ソフトウィングを水道トンネルに取り付け、研究者たちは突風を流れに対する翼の角度の急変として模擬しました。まず定常条件で、キャンバーを調整することで異なる流角で同じ揚力を生み出したり、同じ流角で異なる揚力を得たりできることを示しました。これは、突風が翼を不安定にしようとしたときに、望ましい揚力を回復する「形状空間上の経路」が存在することを意味します。次に、突風が正確にいつ来るかを知っている理想的なオープンループ応答をプログラムし、適切なタイミングで内部チューブを膨張・収縮させました。この最良ケースでは、キャンバーを変えることで擾乱時の揚力低下を約50%から約10%に削減できました。
翼自身に反応させる
より厳しい試験は、何か異常が起きたときに翼自身に判断させることでした。ここでは電子スキンがキャンバー信号に特徴的な“シグネチャ”を検知します:流れの急変で柔らかい本体が撓む際に見られる素早いオーバーシュートと振動です。このパターンが現れると、単純なコントローラが揚力を目標に戻す可能性の高い方向へチューブを膨らませますが、流速や力を明示的に計算するわけではありません。この最小限の戦略でも良好に機能します。同等の剛性翼と比べて、作動させていないソフトウィング単体でも突風のインパルス(時間にわたる総押し)を約3分の1に削減します。能動制御を追加すると、望ましくない揚力インパルスは最大で87%まで減少し、媒質は異なるものの、一部の鳥類で報告されている突風耐性に匹敵またはそれを超える性能に近づきます。
将来のロボットにとっての意義
一般読者にとっての主要な結論は、海中ロボットをより柔らかく、自己を感知できるようにすることで、より頑健で効率的になり得るという点です。複雑で高出力のモータや外部センサーで擾乱と戦う代わりに、ロボット自身の柔軟な体と埋め込み型スキンが流れを吸収して読み取り、控えめな形状変化を引き起こして進路を保ちます。本研究は制御された水槽内の単一実験翼に焦点を当てていますが、同じ原理は機体全体や魚のように泳ぐロボットにも応用できるでしょう。長期的には、このような“身体に宿る知性(embodied intelligence)”が、鳥や魚が空気や水中で示す静かな優雅さで荒れた海洋を探査する機械を可能にするかもしれません。
引用: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
キーワード: ソフトロボティクス, 水中機体, 生物模倣設計, 流れの擾乱抑制, 固有受容感覚センシング