Clear Sky Science · ja
柔らかい物体特性の具現化された触覚知覚
なぜロボットに「感じる」ことを教えるか
ロボットが患者の腹部をやさしく診察したり、傷つけずに熟した果物を選別したり、触覚だけで壊れやすい部品を組み立てたりすると想像してみてください。こうした作業を安全に行うには、ロボットは柔らかい対象を人間のように豊かに「感じる」能力を学ぶ必要があります。本稿では、研究者が電子皮膚と新しい学習モデルを作り、ロボットが柔らかさ、形状、表面の質感をよりよく感知できるようにした方法を説明します—機械を真に巧みな触覚に一歩近づける仕事です。
高度な触覚センスの構築
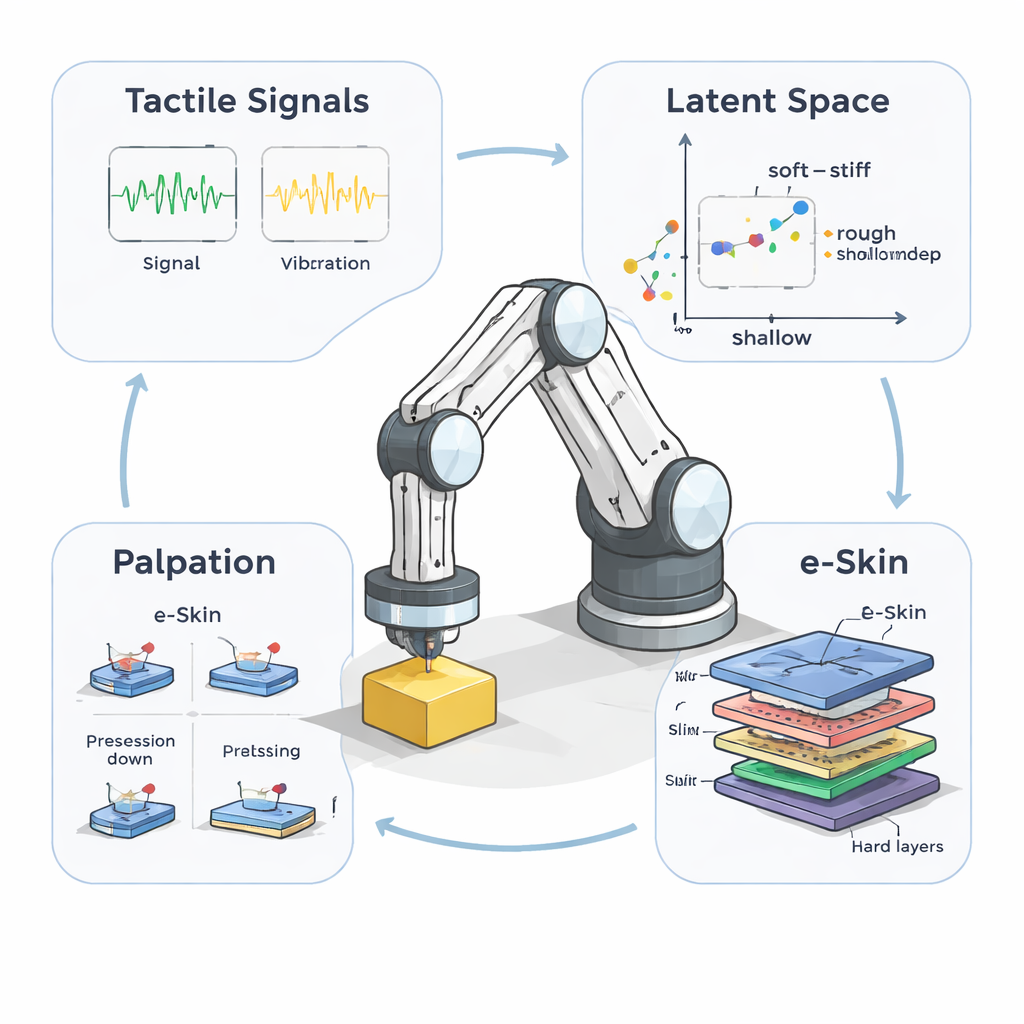
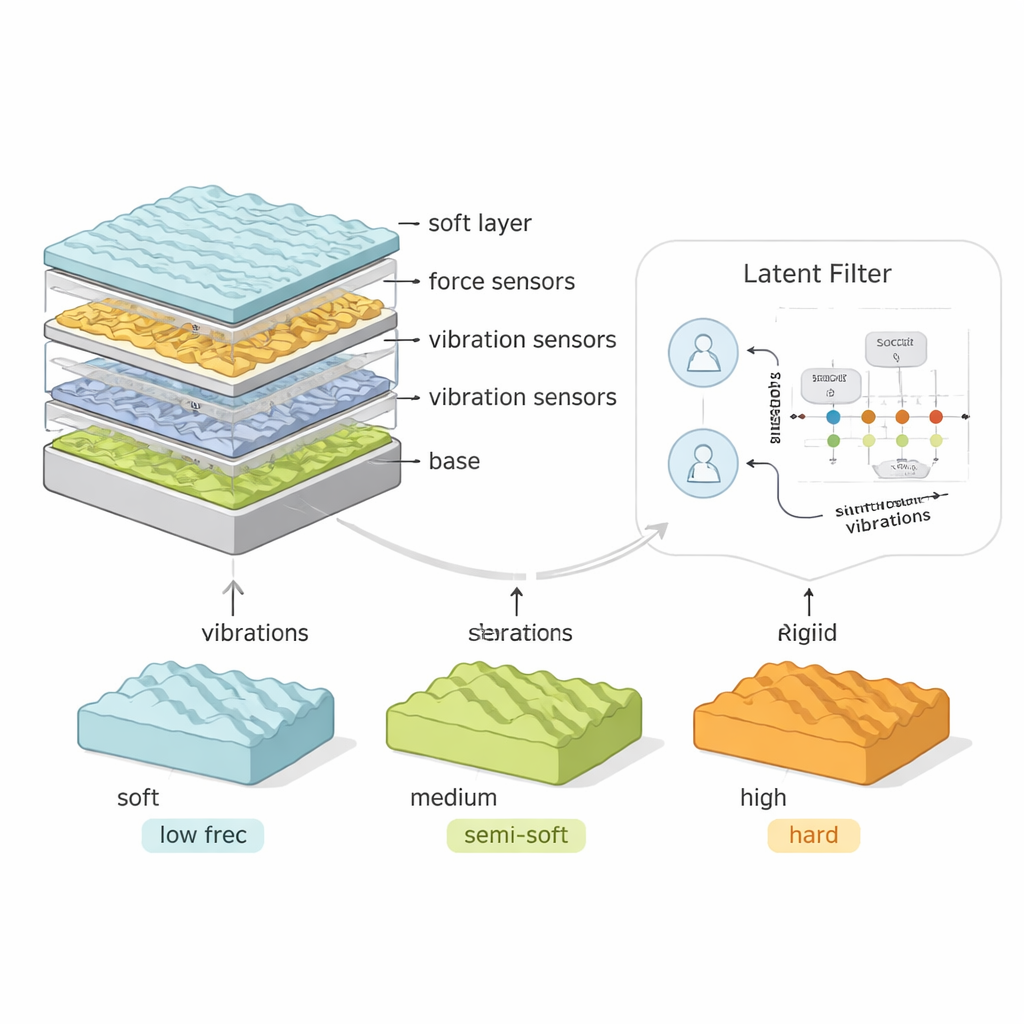
人間の皮膚は柔らかく層構造を持ち、圧力、伸張、振動に反応する様々な受容器が詰まっています。チームはこれらの能力をロボットで模倣することを目指しました。彼らは積層シリコーン層に埋め込まれたセンサーを備えたモジュール式の電子皮膚(e‑Skin)を作成しました。二つの層には各スポットがどれだけ押されているかを測る密な力センサーの格子があり、三つ目の層には粗い布の上を指で滑らせたときに感じるような高速振動を検出する小さな加速度計が組み込まれています。シリコーンの種類を入れ替えることでe‑Skin自体の柔らかさや硬さを変えられ、センサー層をオン・オフすることで異なる「感覚器官」の組み合わせを試せました。
柔らかい物体の世界を設計する
触覚を制御された方法で研究するには、単純なゴムブロック以上のものが必要でした。研究者たちは慎重に特性を調整した「波形オブジェクト」のライブラリを作成しました。各オブジェクトは凹凸のある上面を持ち、その突起は浅いものから高いもの(振幅)まで、また密集しているものから離れているもの(空間周波数)まで変えられ、非常に柔らかいシリコーンから剛直なプラスチックまでの材料で鋳造されました。いくつかのサンプルは柔らかい表面の下に薄い硬い層を隠しており、押し込むと挙動が変わる組織や材料を模倣しています。これにより、ロボットが触れたすべての物体について正確な柔らかさや質感が既知となり、ロボットが「感じた」ものと実際の値を比較できるようになりました。
触覚で探索するロボットの教育
人が物体を評価するために指で突く、押す、滑らせるのと同様に、ロボットは三つの基本的な触診動作を用いました。押し込みでは、全体的な柔らかさを調べるために上下にまっすぐ動かしました。旋回(precession)では、e‑Skinを傾けて転がし、隣接する複数領域に接触してより複雑な形状を探りました。滑りでは、表面上を横方向に動かして細かな質感や摩擦を浮き彫りにしました。各オブジェクトに対して、ロボットは深さや速度を変えてこれらの動作を行い、皮膚上で変化する力や振動の波形といった何千もの時系列触覚信号を生成しました。これらの豊かで動的なデータストリームは、単一の静的な突きでは得られない情報を多く含んでいます。
触覚に隠れたパターンを発見する
この情報の洪水を理解するために、著者らは「潜在フィルタ」と呼ぶ機械学習モデルを導入しました。オブジェクトに直接ラベルを付けようとする代わりに、このモデルはロボットと物体の継続的な相互作用を要約する内部の「地図」を学習します。この潜在空間は、ある成分は即時の触覚信号に迅速に反応し、他の成分は時間をかけて情報を統合するように構造化されています。多くの相互作用で潜在フィルタを訓練することで、この内部マップは表面の粗さ、突起の高さ、剛性など意味のある物理的特性と自然に整列することが示されました—モデルはこれらのラベルを明示的に教えられていませんでした。別の回帰ステップにより、これらの隠れた特徴が物体の真の機械的特性を良好な精度で予測できることが確認されました。
皮膚、感覚、運動が協調する仕組み
実験は、単一のセンサー層や運動戦略がすべての状況で最良というわけではないことを明らかにしました。振動と力の情報をそれぞれ別に処理してから統合する「遅延融合(late fusion)」アプローチにより、柔らかい物体の理解が最も信頼できるものになりました。二つの力センサー層はせん断や伸びを感知するのに役立ち、これは剛性や内部に隠れた構造を検出するうえで重要です。一方、振動は滑り動作中の微細な質感を感じるのに特に有用でした。e‑Skin自体の機械的柔らかさも重要で、硬めの皮膚は全体的な剛性や形状を測るのに適しており、柔らかい皮膚は柔軟な材料や層構造の微妙な差を感知するのに優れていました。これらの結果は、ロボットの触覚は共同設計されるべきだと示唆しています:皮膚の特性、センシング電子機器、ロボットの動き方を一緒に調整する必要があります。
日常的なロボットにとっての意義
層状で人間に触発されたe‑Skinと、行動の役割を尊重する強力な学習モデルを結びつけることで、この研究はロボットがより深い触覚を構築できることを示しています。将来の機械はカメラや単純な力しきい値だけに頼るのではなく、物体がどのように沈み、振動し、探索中にどのように変化するかを感じ取り、その場で把持や動作を調整できるようになるでしょう。こうした能力は医療的触診、軟食物の取り扱い、家庭や工場での変形物の操作などの応用にとって重要です。簡単に言えば、世界を私たちと同じように効果的に触れるためには、ロボットは良いセンサーだけでなく、適切な「身体」と正しい動作の習慣、そしてそれらすべての情報を一貫した理解に織り込む賢い方法を備える必要があることを示しています。
引用: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
キーワード: ロボットタッチ, 電子皮膚, 軟体物体センシング, 触覚知覚, 具現化ロボティクス