Clear Sky Science · ja
GenHand: 一般化された人間の把持運動のキネマティック再割当て
人と同じように物を持てるようにロボットを教える
コーヒーマグをつかみ上げたり、ドライバーを回したりすることは、私たちの手にとってはたやすく見えます。しかし、特にグリッパーが人間の手とまったく異なる形をしている場合、ロボットは日常的な物を安定して把持するのに苦労することが多いです。本稿ではGenHandを紹介します。これは通常の画像に写った人間の手の動きを学習し、それをさまざまな種類のロボットハンドに対して安定的で人間らしい把持へ変換するシステムです。
ロボットハンドに必要なのは単なる模倣ではない
現在の多くのテレオペレーションや模倣学習システムは、人間の手の姿勢をそのままロボットハンドに写し取ろうとします。指先の位置や関節角をできるだけ一致させようとするのです。しかしこれはロボットハンドが人間の手とよく似ていて、指や関節の数も近い場合にしかうまく機能しません。例えば単純に2本の平たい指しか持たないグリッパーでは、コピーした姿勢がもはや安全な把持を生まないことがあります。これらの手法はまた、物体の形状や実際にどこで安定的な接触を作るべきかを十分に考慮していないため、把持が滑ったり、バランスを失ったり、表面に正しく触れないままになったりします。
手と物を一緒に見る
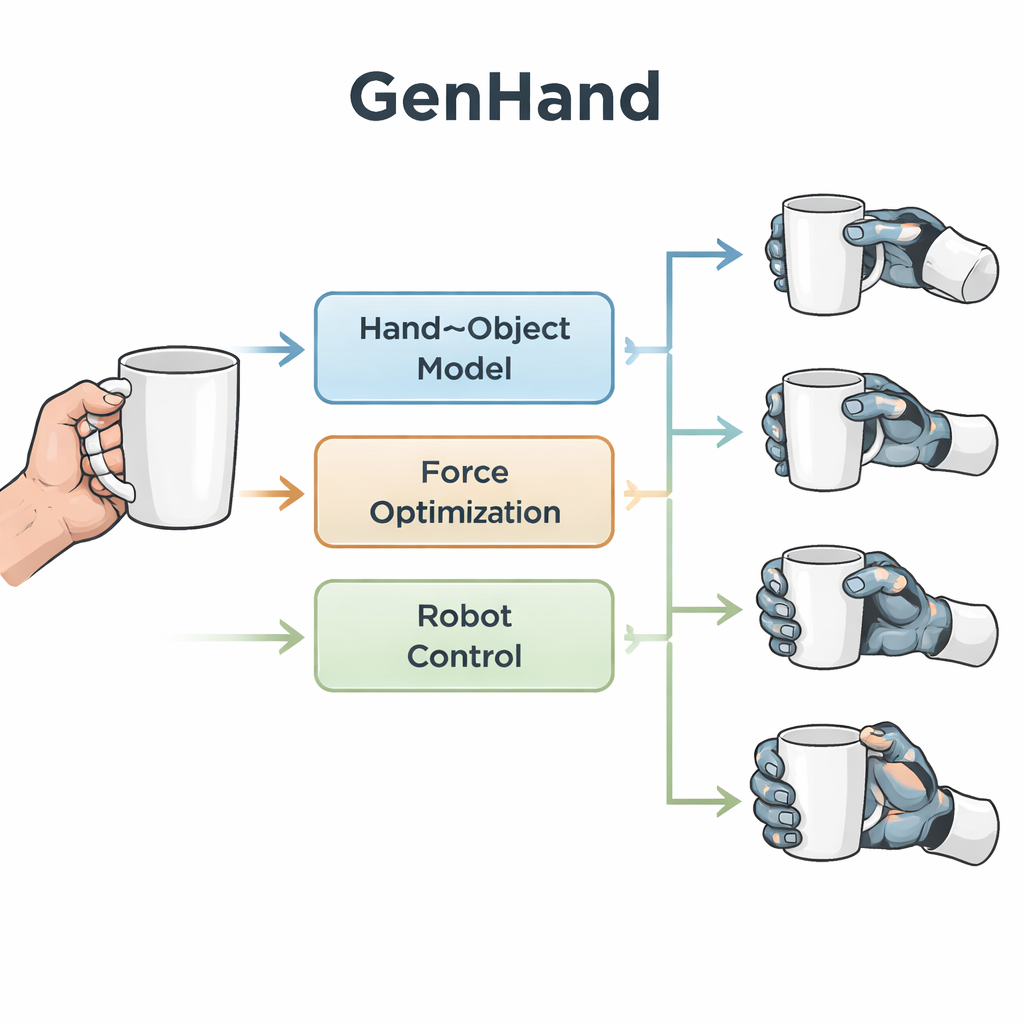
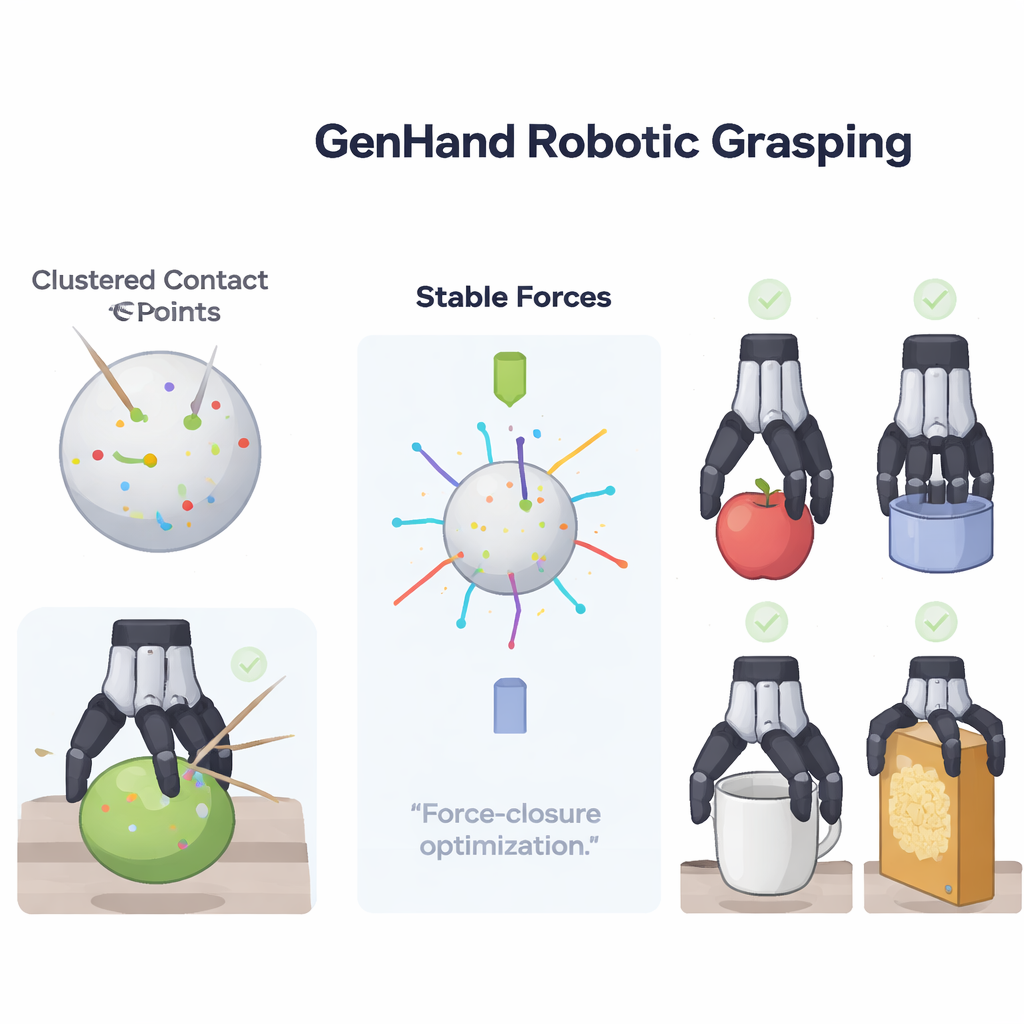
GenHandは手の形状だけでなく、手と物体との相互作用に着目することでこの問題に取り組みます。通常のRGB画像から出発して、システムは物体の詳細な3Dモデルと人間の手のパラメトリックな3Dモデルを再構成します。ニューラルネットワークで手の姿勢を推定し、進んだ「符号付き距離(signed distance)」表現を用いて物体の表面を復元します。これら2つのモデルから、GenHandは人間の指先が実際にどこで接触しているか、そしてどの方向に力を加えているかを特定します。次にこれらの接触点を意味のある領域と力の方向の小さな集合にクラスタリングし、人間の把持の本質的な構造を要約しつつ不要な詳細を取り除きます。
各ロボット向けに把持を再設計する
GenHandが主要な接触領域とそれらが物体をどう支えるかを理解したら、特定のロボットグリッパーに適した新しい「接触アンカー」集合を構築します。単純な2本指グリッパーでは、箱を挟む親指2本のように対向する2つの接触領域だけを残すかもしれません。3本、4本、5本といったより多指の巧緻な手では、人間の把持の豊かな接触パターンにより合うよう追加のアンカーを割り当てることができます。続いて数学的最適化のステップで、あらゆる方向の力とトルクを釣り合わせられる接触位置、いわゆる力閉包(force closure)を満たす表面上の接触点を探索します。重要なのは、GenHandが元の人間の接触に近い状態を保ちながら、得られた把持が現実世界で物理的に安定であることを要求する点です。
安定した接触から実際のロボット動作へ
安定した接触アンカーが決まると、第2の最適化段階でロボットの実際の関節角や手首の動きを求め、関節の限界を超えたり物体と衝突したりしない形でそれらのアンカーを実現できるようにします。これを実現するために、GenHandはロボットの潜在的な接触箇所を望ましいアンカーに繰り返しマッチングさせ、姿勢を調整し、リンクが物体に侵入していないかをチェックします。このプロセスは単純なRobotiqの2本指グリッパーから高関節自由度の5本指Shadowハンドまで様々なロボットハンドに適用され、物理シミュレーションで評価されました。指先の形状を真似るだけの既存の代表手法と比べ、GenHandは力の不均衡がはるかに小さく、表面接触の精度が高く、異なる摩擦条件下で20種類の日用品を持ち上げて保持する際の成功率が大幅に向上しました。
日常ロボットの未来に向けて
一般読者にとって重要なのは、GenHandがロボットに「どこに指を置くか」だけでなく「どのように持つか」をより良く教えるという点です。実際の人間の把持から学び、物理的安定性の基本ルールを適用することで、同じ人間のデモンストレーションを非常に異なるロボットハンドに再割当てしても、しっかりとした信頼できる把持を達成できます。これによりテレオペレーションの操作が容易になり、学習システムはより豊かな例で訓練できるようになり、家庭や職場で人間と同じ幅広い物体を安全に扱えるロボットに一歩近づきます。
引用: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
キーワード: ロボット把持, テレオペレーション, 人間のデモンストレーション, ロボットハンド, 操作・マニピュレーション