Clear Sky Science · ja
ビジョンベースの力・トルクセンシング用カメラを内蔵した低コスト3Dプリント小型ロボットグリッパー
小型ソフトグリッパーが重要な理由
ロボットはより小さくなり、微細な作業をこなすようになっています。微小な歯車の組み立てから、潰さずに熟したベリーを摘む作業まで。その一方で多くのロボットハンドは依然として「目隠し」で握っており、どれだけの力で押しているかをほとんど感知していません。本稿は「Seezer」と呼ばれる、低コストで3Dプリント可能な小型グリッパーを紹介します。これは壊れやすい物体を掴めるだけでなく、指先内部の小型カメラを用いて高価な力センサの代わりに力を“感じる”ことができます。
見ることのできる優しい手
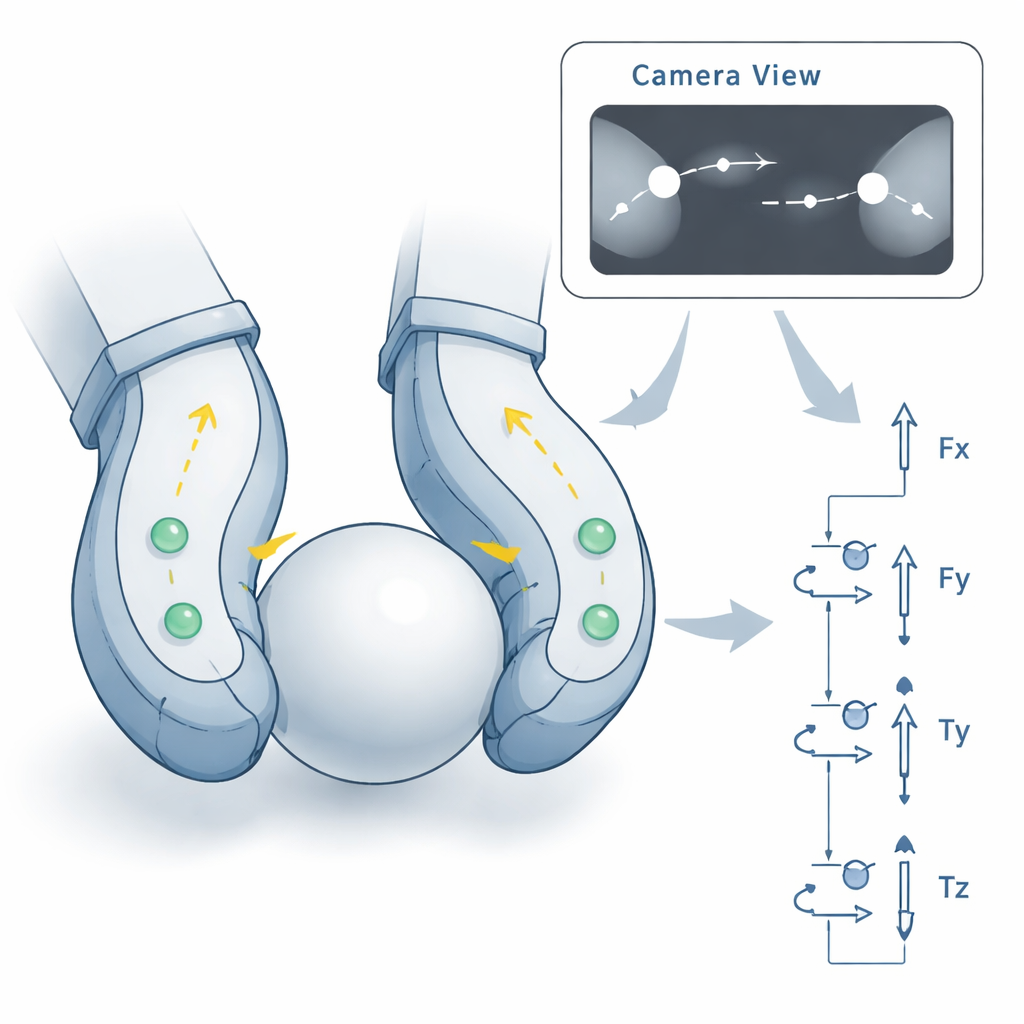
Seezerは剛性のある金属プライヤのようにヒンジで動くのではなく、しなることで動く柔軟で追従性のあるロボットグリッパーです。主要な考え方は、汎用の3Dプリンタでほとんど全てを一体で作ることにあります:柔軟な関節、作業に合わせた指先形状、小さな埋め込みマーカーを含む単一成形の指部品です。この使い捨てに近い指モジュールは、ミニチュアカメラと照明を収めたコンパクトなモータユニットにスライドして装着されます。モータがウォームギアを回すと柔軟な関節が曲がり、指が物体を閉じる一方でカメラは指先とグリッパー前方の空間を撮像します。

指の曲がりから力を読み取る
指に配線やひずみゲージ、圧力パッドを埋め込む代わりに、Seezerは内部に情報量の多い視覚的手がかりを施します。各指先には小さな円形の「フィデューシャル」マーカーが配置され、指が変形するたびにカメラ映像中でその位置が変わります。ソフトウェアはまず各フレームでこれらのマーカーを検出・追跡します。続いて短いキャリブレーションシーケンスに基づき、単純な数理モデルがマーカー位置の変化と各指先にかかる実際の押し引きの力との関係を学習します。三つの指先力を基本的な物理法則で組み合わせることにより、システムはグリッパーに作用する全方向の六成分の力とトルク、および指間の締め付け力を推定します。
力の感知精度はどれほどか
このカメラベースのセンシングの精度を検証するため、著者らは制御された実験環境でSeezerの推定を高精度市販力/トルクセンサの読み値と比較しました。ある指デザイン(硬めの先端)では、把持力は最大約1.1ニュートンまで計測でき、典型的な誤差は8〜17%でした。六自由度の力・トルク推定の誤差は概ね8〜24%の範囲にありました。柔らかい指先のバージョンは最大荷重を犠牲にする代わりに感度が上がり、より小さな力を生成しますが割合誤差は同程度でした。重要なのは、モデルが必要としたキャリブレーションデータは31〜141点と少なく、フルフレームの画像を用いる深層学習手法が通常必要とする数千枚に比べて遥かに少ないことです。
小さな歯車からやわらかいベリーまで
二つのデモンストレーション課題が、このグリッパーの実用性を示しています。一つはSeezerが小さな3Dプリント歯車を軸から繰り返し摘み取り、移動させて元に戻す作業で、内部カメラを使って歯車のキー溝を軸に合わせ、指の動きを監視しました。これは狭い空間での精密な産業組立作業を想起させます。もう一つは赤スグリ(レッドカラント)を茎から収穫するもので、システムは自身の推定把持力をリアルタイムで監視し、あらかじめ設定した力閾値に達したら閉じる動作を止めて果実を潰さずに摘み取りました。どちらの例も安価な電子部品で動作し、一つの設計が数ミリサイズの硬い物体と柔らかい物体の両方を扱えることを示しました。
課題と今後の応用
Seezerは概念実証の段階であり、いくつかの制約があります。マーカー追跡は安定した十分な照明と整った背景の下で最も良く機能し、照明変化や光沢面、複雑な動きは追跡エラーを引き起こす可能性があります。カメラの控えめなフレームレートも、厳しい力制御や豊かな触覚フィードバックに対する応答速度を制限します。指材料は長期間の使用で疲労や振る舞いの変化を起こすことがあり、著者らはまだ長期間での系統的な性能試験を行っていません。より堅牢な追跡アルゴリズムや、ハードウェアを現代の深層学習ベースの力推定器と組み合わせることで精度と信頼性を向上させられると著者らは主張しています。また3Dプリントの進歩によりさらなる微細化や、外科や実験室用途向けの滅菌可能な使い捨て指先が実現できる可能性があります。
日常ロボティクスへの意味
簡単に言えば、この研究は小さく安価なロボットハンドが自分の柔らかい指の曲がり方を「見る」ことで同時に視覚と触覚を獲得できることを示しています。控えめなキャリブレーションデータと既製部品だけで、Seezerはどのくらいの力で握っているか、接触力やトルクがどの方向に働いているかを推定でき、優しく扱う作業には十分な精度を示しています。堅牢性が向上すれば、この手法は将来のロボットがスペースやコストが制約される場面でも、医療機器、電子部品、果実、あるいは低侵襲手術での組織のような小さく壊れやすい物体を大型センサや複雑なハードウェアなしに扱うのに役立つでしょう。
引用: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
キーワード: ソフトロボットグリッパー, ビジョンベース力センシング, 3Dプリントロボティクス, 小型操作, 触覚フィードバック